КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тема 4. Противоаварийная автоматика, автоматический контроль и телемеханика в энергосистемах
|
|
|
|
Лекция 15. Назначение и виды противоаварийной автоматики. Автоматический контроль режимов работы энергосистем. (2 часа)
Назначение и виды противоаварийной автоматики.
Нарушение нормального режима энергосистемы в результате воздействия аварийного возмущения приводит к возникновению следующих видов опасностей:
• недопустимому снижению надежности режима энергосистемы с высокой вероятностью нарушения устойчивости параллельной работы электростанций, узлов нагрузки,
• возникновению в энергосистеме асинхронного режима, приводящего к нарушению электроснабжения потребителей, опасного для оборудования и предрасположенного к дальнейшей эскалации с переходом одночастотного АР в многочастотный,
• недопустимому снижению напряжения, возникновению лавины напряжения с нарушением электроснабжения потребителей,
• недопустимому повышению напряжения с повреждением оборудования,
• недопустимому повышению частоты с отключением генераторов и погашением электростанций,
• недопустимому снижению частоты с погашением электростанций,
возникновением лавины частоты и массовым отключением нагрузки потребителей,
• повреждению оборудования в результате его перегрузки транзитными потоками мощности.
В целях предотвращения возникновения и развития аварий в энергосистемах, их локализации и ликвидации путем выявления опасных аварийных возмущений или недопустимых отклонений параметров электрического режима и осуществления противоаварийного управления применяют противоаварийную автоматику (ПА).
Различают функциональное и аппаратное структурное построение ПА. В эксплуатации функциональные структурные схемы используются при описании режимных принципов выполнения и действия ПА, составлении инструкций по режимам работы энергообъединений, энергоузлов, межсистемных и внутрисистемных связей. Аппаратные структурные схемы необходимы для составления инструкций по обслуживанию противоаварийной автоматики, оперативных заявок на вывод в ремонт ПА или ее частей.
Обобщающее понятие функциональной структуры — система ПА, которая в пределах своего энергоузла, энергорайона, энергообъединения решает все задачи противоаварийного управления и включает ряд подсистем, обеспечивающих:
предотвращение нарушения устойчивости параллельной работы (АПНУ),
ликвидацию асинхронного режима (АЛАР),
ограничение снижения частоты (АОСЧ),
ограничение повышения частоты (АОПЧ),
ограничение снижения напряжения (АОСН),
разгрузку (предотвращение недопустимой перегрузки) оборудования (АРО)
Подсистемы ПА, функционируя совместно, взаимно дополняют и резервируют друг друга и образуют, таким образом, эшелонированную систему ПА, обеспечивающую требуемый уровень живучести энергосистемы.
На подсистему АПНУ, представляющую собой первый эшелон этой системы, возлагается задача обеспечения устойчивости энергосистемы. Если по каким-либо причинам нарушение устойчивости все же произойдет, то подсистема АЛ АР должна обеспечить прекращение асинхронного режима путем ресинхронизации или деления электрической сети.
Задача предотвращения недопустимых отклонений частоты, вызываемых аварийными возмущениями или разделениями энергосистемы на несинхронные части (включая и деления от действия подсистемы АЛАР), возлагается на подсистемы АОСЧ и АОПЧ. Подсистема АОСЧ при снижениях частоты осуществляет автоматический частотный пуск и загрузку генераторов электростанции, а также частотную разгрузку энергосистемы посредством отключения части нагрузки потребителей. Подсистема АОПЧ воздействует на отключение гидрогенераторов и разгрузку энергоблоков тепловых электростанций при опасных повышениях частоты. В наиболее тяжелых случаях при каскадных авариях или особо крупных небалансах мощности и при неэффективности действия подсистем АОСЧ и АОПЧ на поддержание частоты в допустимых для работы тепловых и атомных электростанций пределах осуществляется выделение этих электростанций или части энергоблоков на питание местной нагрузки или нагрузки собственных нужд.
Подсистема АРО предназначена для защиты оборудования от повреждений, вызываемых перегрузкой по току. В то же время должны исключаться излишние действия этой подсистемы, так как они могут привести к каскадному развитию аварии в энергосистеме вследствие перегрузки других элементов электрической сети и нарушения устойчивости. Подсистема АОСН предназначена для предотвращения нарушения устойчивости нагрузки и расстройства технологических процессов собственных нужд электростанций при аварийных возмущениях, сопровождающихся снижением напряжения.
Любая подсистема ПА представляет собой некоторый набор автоматик, которые могут объединяться в определенные виды. Каждая автоматика решает законченную задачу противоаварийного управления, включающую следующие операции:
- фиксация аварийного возмущения или нарушения контролируемыми параметрами электрического режима заданных ограничений;
- запоминание предаварийного состояния энергосистемы: схемы и текущего режима в момент фиксации возмущения или нарушения параметрами режима заданных ограничений;
- оценка степени тяжести аварийного возмущения и необходимости осуществления управляющих воздействий для зафиксированного предаварийного состояния энергосистемы;
- выбор видов, объемов и мест реализации управляющих воздействий;
- реализация управляющих воздействий.
Автоматический контроль режимов работы энергосистем.
Для передачи информации от устройств контроля обычно используются интерфейсы трех типов:
- RS232,
- RS485,
- ST коннектор для подключения оптоволоконного кабеля.
Интерфейс RS232 обеспечивает дальность передачи информации до 20 метров. RS485 – до 1200 метров по витой экранированной паре без дополнительного усиления. С дополнительным промежуточным усилителем дальность связи может быть увеличена вдвое. При применении кабеля соответствующего типа, дальность связи по оптокабелю
составляет до 15 км.
Кроме того, дальность связи по интерфейсу RS232 может быть увеличена за счет применения схемы передачи RS232/опто - опто кабель - опто/RS232. Применение интерфейсов RS232 и опто предполагает построение системы сбора информации от каждого устройства (по выделенной линии) к центральному устройству (концентратору).
Тогда как применение интерфейса RS485 позволяет осуществить параллельное подключение до 32 устройств к одной ветви. Правда при этом скорость передачи информации по оптокабелю существенно больше, чем по витой паре. Так скорость передачи информации по интерфейсу RS485 обычно не превышает 38,4 Кбит/сек, хотя некоторые протоколы (например, K-Bus)обеспечивают и более высокую скорость передачи – до 64 Кбит/сек.
Информация для передачи на верхний уровень управления в устройствах РЗА хранится обычно в оперативной памяти и считывается по запросу с верхнего уровня управления – контроллером или рабочей станцией объекта.
Кроме типа интерфейса существенную роль на возможность получения информации от устройства РЗА является протокол связи. Т.е. вышестоящее устройство должно «уметь разговаривать» с устройством РЗА на одном языке.
Наиболее распространенные протоколы для связи с микропроцессорными устройствами это:
- Modbus,
- Frofibus,
- SPA b us,
- DNP 3.0,
- IEC (МЭК) 60870-5-103.
Одна из схем соединения устройств в локальную сеть приведена на рис.1.
Полученная от устройств РЗА информация может представляться на экране рабочей станции объекта в виде соответствующего набора экранов. Число экранов, их графическое исполнение и функциональное наполнение определяются конкретным типом системы управления, используемой на данном объекте.
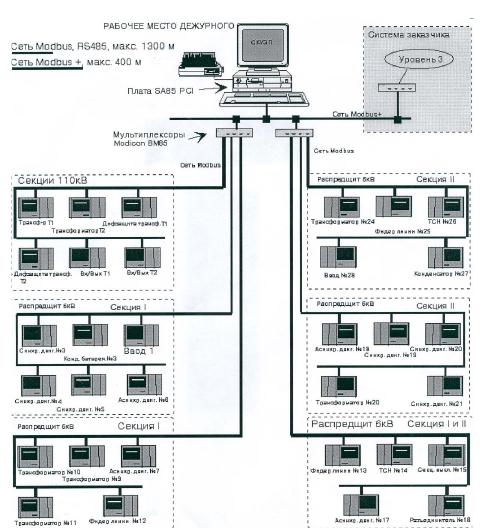
Рисунок 1. Локальная сеть энергетического объекта
Кроме того, часть информации может передаваться на верхний уровень управления – диспетчеру соответствующего уровня. Для передачи информации на верхний уровень управления рекомендуется использовать протокол IEC (МЭК) 60870-5-101, хотя могут быть использованы и другие протоколы связи.
Лекция 16. Устройства телемеханики в энергосистемах. (2 часа)
Средства телемеханики (телеуправление, телесигнализация, телеизмерение и телерегулирование) должны применяться для диспетчерского управления территориально рассредоточенными электроустановками, связанными общим режимом работы, и их контроля.
Обязательным условием применения средств телемеханики является наличие технико-экономической целесообразности (повышение эффективности диспетчерского управления, т.е. улучшение ведения режимов и производственных процессов, ускорение ликвидации нарушений и аварий, повышение экономичности и надежности работы электроустановок, улучшение качества вырабатываемой энергии, снижение численности эксплуатационного персонала и отказ от постоянного дежурства персонала, уменьшение площадей производственных помещений и т. п.).
Средства телемеханики могут применяться также для телепередачи сигналов систем АРЧМ, противоаварийной автоматики и других системных устройств регулирования и управления.
Объемы телемеханизации электроустановок должны определяться отраслевыми или ведомственными положениями и устанавливаться совместно с объемами автоматизации. При этом средства телемеханизации в первую очередь должны использоваться для сбора информации о режимах работы, состоянии основного коммутационного оборудования, изменениях при возникновении аварийных режимов или состояний, а также для контроля за выполнением распоряжений по производству переключений (плановых, ремонтных, оперативных) или ведению режимов эксплуатационным персоналом).
При определении объемов телемеханизации электроустановок без постоянного дежурства персонала в первую очередь должна быть рассмотрена возможность применения простейшей телесигнализации (аварийно-предупредительная телесигнализация на два или более сигналов).
Телеуправление должно предусматриваться в объеме, необходимом для централизованного решения задач по установлению надежных и экономически выгодных режимов работы электроустановок, работающих в сложных сетях, если эти задачи не могут быть решены средствами автоматики.
Телеуправление должно применяться на объектах без постоянного дежурства персонала, допускается его применение на объектах с постоянным дежурством персонала при условии частого и эффективного использования.
Для телеуправляемых электроустановок операции телеуправления, так же как и действие устройств защиты и автоматики, не должны требовать дополнительных оперативных переключений на месте (с выездом или вызовом оперативного персонала).
Телесигнализация должна предусматриваться:
- для отображения на диспетчерских пунктах положения и состояния основного коммутационного оборудования тех электроустановок, находящихся в непосредственном оперативном управлении или ведении диспетчерских пунктов, которые имеют существенное значение для режима работы системы энергоснабжения;
- для ввода информации в вычислительные машины или устройства обработки информации;
- для передачи аварийных и предупредительных сигналов.
Телесигнализация с электроустановок, которые находятся в оперативном управлении нескольких диспетчерских пунктов, как правило, должна передаваться на вышестоящий диспетчерский пункт путем ретрансляции или отбора с нижестоящего диспетчерского пункта. Система передачи информации, как правило, должна выполняться не более чем с одной ступенью ретрансляции.
Для телесигнализации состояния или положения оборудования электроустановок, как правило, должен использоваться в качестве датчика один вспомогательный контакт или контакт реле-повторителя.
Телеизмерения должны обеспечивать передачу основных электрических или технологических параметров (характеризующих режимы работы отдельных электроустановок), необходимых для установления и контроля оптимальных режимов работы всей системы энергоснабжения в целом, а также для предотвращения или ликвидации возможных аварийных процессов.
Телеизмерения наиболее важных параметров, а также параметров, необходимых для последующей ретрансляции, суммирования или регистрации, должны выполняться, как правило, непрерывными. Система передачи телеизмерений на вышестоящие диспетчерские пункты, как правило, должна выполняться не более чем с одной ступенью ретрансляции.
При выполнении телеизмерений должны учитываться необходимость местного отсчета параметров на контролируемых пунктах. Измерительные преобразователи (датчики телеизмерений), обеспечивающие местный отсчет показаний, как правило, должны устанавливаться вместо щитовых приборов, если при этом сохраняется класс точности измерений.
Объемы телемеханизации электроустановок, требования к устройствам телемеханики и каналам связи (тракт телепередачи) при использовании средств телемеханики для целей телерегулирования определяются в части точности, надежности и запаздывания информации проектом автоматического регулирования частоты и потоков мощности в объединенных энергосистемах. Телеизмерения параметров, необходимых для системы автоматического регулирования частоты и потоков мощности, должны выполняться непрерывными.
Тракт телепередачи, используемый для измерения потоков мощности, а также для передачи сигналов телерегулирования на основные или группу регулирующих электростанций, как правило, должен иметь дублированный канал телемеханики, состоящий из двух независимых каналов.
Устройство быстродействующего телеотключения.
В устройствах телеотключения быстродействие (время срабатывания устройства менее 0,05 с) и отстройка от помех достигнуты применением частотного кода. В нормальных условиях передатчик устройства телеотключения (ТО) генерирует непрерывно высокочастотный сигнал, называемый контрольным, который улавливается приемником. Исчезновение этого сигнала на время 35 с и более указывает на неисправность тракта высокой частоты или аппаратуры.
В этом случае на приемной стороне автоматически размыкаются выходные цепи и подается сигнал оповещения оперативного персонала. При работе пускового органа устройства ТО производится изменение частоты, генерируемой передатчиком. Устройство дает возможность передачи нескольких команд, каждой из которых соответствует свое значение частоты передатчика. При этом в каждый момент времени может передаваться только одна команда. В случае одновременного возникновения нескольких команд они передаются поочередно в порядке установленного приоритета.
Приемник устройства фиксирует частоту принимаемого сигнала. Одновременное исчезновение контрольного сигнала и появление сигнала какой-либо команды приводят к срабатыванию соответствующего выходного реле приемника.
Упрощенная принципиальная схема устройства ТО показана на рис. 1
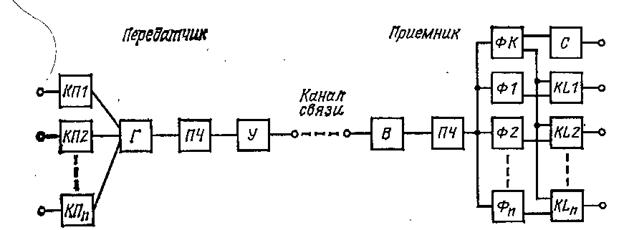
Рисунок 1. Упрощенная принципиальная схема устройства телеотключения
Передатчик устройства содержит гeнepaтop Г, частота которoгo может изменяться при срабатывании пусковых реле КП1 - КПn. Частота сигнала гeнepaтopa, как правило, лежит в диапазоне звуковых частот. Преобразователи ПЧ преобразуют ее в высокую частоту, подлежащую передаче по ВЧ каналу по линии электропередачи. Сигнал высокой частоты усиливается усилителем У.
В приемнике сигнал проходит входное устройство В, содержащее полосовые фильтры, выделяющие полосу частот, отведенную для данного ВЧ канала. Преобразователями ПЧ высокая частота сигнала преобразуется в звуковую частоту. Затем сигнал проходит в один из полосовых фильтров Ф. Фильтр Фк настроен на частоту контрольного сигнала, фильтры Фl Фn соответственно на частоты каждой из команд.
Выделенный фильтром сигнал команды (при условии отсутствия контрольногo сигнала) приводит в действие соответствующее выходное реле КL, контакты которого выведены на внешние зажимы. Сигнал контрольной частоты в случае eгo исчезновения (без передачи команды) приводит в действие устройство сигнализации С.
Лекция 17. Принципы действия автоматических регуляторов частоты и активной мощности, основные схемы автоматических регуляторов частоты и активной мощности (2 часа).
Принципы действия автоматических регуляторов частоты и активной мощности.
С целью повышения уровня автоматизации и точности поддержания частоты в энергосистеме используются специальные устройства - автоматические регуляторы частоты. Эти централизованные устройства, называемые вторичными регуляторами, поддерживают заданное значение частоты в энергосистеме, воздействуя на установленные на агрегатах электростанций первичные регуляторы частоты вращения турбин.
Вторичные автоматические регуляторы частоты (АРЧ) измеряют с достаточной точностью отклонения частоты от номинального значения и вырабатывают управляющие команды.
На рис. 1 представлены схемы наиболее простых измерительных органов АРЧ, реагирующих на мгновенные отклонения частоты. Схемы представляют собой контуры из параллельно включенных активного сопротивления и индуктивности (рис. 1а) или емкости (рис. 1б).
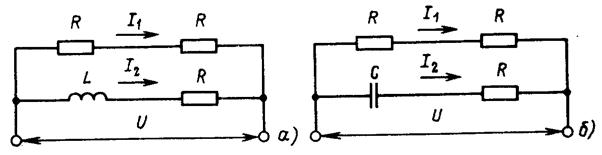
Рисунок 1. Схемы наиболее простых измерительных органов АРЧ
Контур настроен так, что при номинальном значении частот сети токи I1 и I2 равны по значению. При понижении или повышении частоты сети вследствие изменения XL или XC равенство токов нарушается. В результате в зависимости от значения и знака отклонения частоты сети изменяется фаза тока на выходе контура, что и используется как признак отклонения частоты от номинального значения.
В других схемах используются резонансные контуры с параллельным включением L и С, а также фазочувствительные, фильтровые и балансные схемы. Кроме АРЧ, реагирующих на мгновенные отклонения частоты, используются также АРЧ, измерительные органы которых вырабатывают на своем выходе сигнал, пропорциональный интегралу отклонения частоты за заданный промежуток времени.
Автоматический регулятор частоты имеет астатическую характеристику и воздействует на агрегаты электростанции, выделяемой для регулирования частоты в энергосистеме. Недостатком воздействия только па одну регулирующую электростанцию является необходимость обеспечения регулировочного диапазона на этой одной электростанции, что практически возможно при наличии в энергосистеме достаточно мощной гидростанции. При недостаточном регулировочном диапазоне на одной электростанции АРЧ может воздействовать одновременно на две и более электростанции, используя для этой цели специальные каналы телерегулирования.
Автоматическое регулирование частоты должно осуществляться так, чтобы при этом обеспечивалась также наиболее экономичная работа электростанций и энергосистемы в целом. Одним из основных условий получения максимальной экономичности является наивыгоднейшее распределение нагрузки между агрегатами электростанции или между электростанциями энергосистемы, обеспечивающее наименьшие расход условного топлива и потери мощности в электрической сети.
Выполнение первого условия достигается тем, что при понижении частоты в первую очередь загружаются наиболее экономичные, а при повышении частоты разгружаются наименее экономичные агрегаты или электростанции. Это требование относится к агрегатам одной электростанции и к электростанциям, связанным короткими сетями, потери мощности в которые не оказывают существенного влияния на экономичность энергосистемы в целом.
Если же электростанции связаны сетями большой протяженности, то должно быть обеспечено выполнение также и второго условия. Для этого загрузка и разгрузка электростанций при регулировании частоты должны производиться не только с учетом их экономичности, но также с учетом потерь мощности в сети.
Основные схемы автоматических регуляторов частоты и активной мощности.
Для выполнения указанных требований применяются специальные устройства распределения мощности (УРМ) разных типов, которые распределяют общее задание между электростанциями в соответствии с заранее рассчитанным для них долевым участием (рис. 2). На регулирующих электростанциях также устанавливаются устройства для распределения задания между агрегатами. Такая система регулирования частоты называется централизованной.
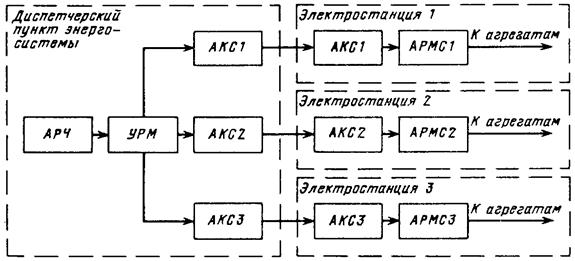
Рис. 8.8. Структурная схема централизованного регулирования частоты несколькими регулирующими электростанциями: АРЧ - автоматический регулятор частоты; УРМ - устройство распределения мощности между электростанциями: AKC1-АКСЗ устройства связи для передачи и приема команд телерегулирования; АРМС1-АРМСЗ устройства распределения мощности между агрегатами электростанций.
Как показано на структурной схеме на рис. 2, АРМС воспринимает задания на изменение мощности электростанции от регуляторов частоты (АРЧ), перетока мощности (АРПМ), ограничителя перетока мощности (АОПМ) и от ручного задатчика внеплановой мощности (РЗВН) и распределяет суммарное задание между энергоблоками в заранее заданном долевом участии по их экономическим характеристикам.
Устройства АРМБ, получая задние or АРМС и ручного задатчика плановой мощности РЗПН, вырабатывают суммарное воздействие на регуляторы нагрузки турбин РНТ и котлов РНК через них - на изменение мощности турбогенератора и котла. Изменение мощности прекращается, когда фактическая нагрузка генератора, контролируемая датчиком мощности ДМ, становится равной заданию. Эту мощность поддерживает АРМБ неизменной до тех пор, пока не изменится задание. Поэтому для того, чтобы АРМБ не препятствовал изменению под действием первичного РЧВ мощности при аварийном повышении или понижении частоты, используется частотный корректор ЧК, который при значительном отклонении частоты подает на АРМБ дополнительное задание на соответствующее изменение мощности энергоблока. Гидростанции оснащаются устройствами группового управления мощностью, выполняющими аналогичные функции.
|
|
|
|
|
Дата добавления: 2014-11-08; Просмотров: 3992; Нарушение авторских прав?; Мы поможем в написании вашей работы!