КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Системы пакетной обработки
|
|
|
|
Использование мультипрограммирования для повышения пропускной способности компьютера главной целью является минимизация простоев всех устройств компьютера, и прежде всего, процессора. Простои могут возникать из-за приостановки задач по внутренним причинам, связанным, например, с ожиданием ввода данных. Данные могут храниться на диске или поступать от пользователя, от измерительной аппаратуры и т. д. При возникновении таких ситуаций самым простым и естественным решением, повышающим эффективность использования процессора, является переключение процессора на выполнение другой задачи, у который есть все данные для обработки. Такая концепция мультипрограммирования лежит в основе пакетных систем.
Системы пакетной обработки предназначались для решения в основном вычислительных задач, не требующих быстрого получения результата. Главным критерием эффективности пакетной системы является пропускная способность – количество решаемых задач в единицу времени.
Для максимизации этого критерия в таких системах используется следующая схема функционирования:
- в начале работы системы формируется пакет заданий,
- каждое задание содержит требование к системным ресурсам,
- из этого пакета задач формируется мультипрограммная смесь, то есть, множество одновременно выполняемых задач.
Для одновременного выполнения выбираются задачи, предъявляемые разные требования к ресурсам, чтобы обеспечивалась сбалансированная загрузка всех устройств компьютера. Например, в мультипрограммной смеси желательно присутствие вычислительных задач и задач с интенсивным вводом и выводом.
Выбор нового задания из пакета зависит от внутренней ситуации в системе, то есть, выбирается выгодное для данной ситуации задание. Из этого следует, что в пакетных вычислительных системах нельзя гарантировать выполнение того или иного задания в течение определенного времени.
Рассмотрим варианты совмещения во времени операций ввода-вывода и вычислений.
Один из вариантов такого совмещения характерен для компьютеров, имеющих специализированный процессор ввода-вывода. В мейнфреймах такие процессоры называют каналами. Обычно канал имеет собственную систему команд, отличающуюся от системы команд центрального процессора. Эти команды предназначены для управления внешними устройствами, и имеют вид:
- проверить состояние устройства,
- установить магнитную головку,
- установить начало листа,
- напечатать строку и т. д.
Канальные программы могут храниться в той же памяти, что и программы центрального процессора. Специальная инструкция центрального процессора передает каналу параметры и указывает, какую программу ввода-вывода он должен выполнить. С этого момента центральный процессор и канал могут работать параллельно (рисунок 7.1).
Другой способ совмещения вычислений с операциями ввода-вывода реализуется в компьютерах, в котором внешние устройства управляются не процессором ввода-вывода, а контроллерами. Обычно каждое внешнее устройство или их группа имеет собственный контроллер, который автономно отрабатывает команды, поступающие от центрального процессора. При этом контроллеры и центральный процессор работают асинхронно.
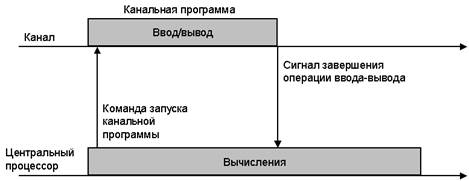
Рисунок 7.1 – Параллельное выполнение вычислений и операций ввода-вывода в системах с каналом
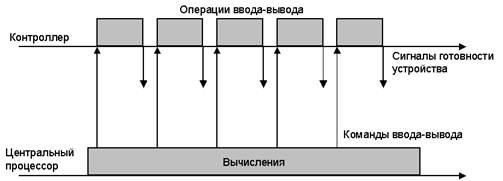
Рисунок 7.2 – Параллельное выполнение вычислений и операций ввода-вывода в системах с контроллерами
Многие внешние устройства включают в себя движущиеся части, контроллер обычно выполняет свои команды медленнее, чем центральный процессор. Этот факт используется для организации параллельного выполнения вычислений и операций ввода-вывода. Вычисления могут выполняться между выдачей команд контроллерам внешних устройств. Такой механизм показан на рисунке 7.2.
Центральный процессор узнает о том, что контроллер готов принять следующую команду либо по сигналу прерывания, либо периодически опрашивая состояние контроллеров.
Максимальный эффект достигается при наиболее полном перекрытии вычислений и операций ввода-вывода. Если в системе выполняется одна задача, степень ускорения зависит от характера данной задачи и от того, насколько тщательно был учтен возможный параллелизм при программировании. Если в задаче преобладают вычисления или ввод-вывод, ускорение практически отсутствует. Невозможен параллелизм также в тех случаях, когда для продолжения вычислений необходимо полное завершение операций ввода-вывода. В этих случая простои центрального процессора неизбежны.
Если в системе одновременно выполняется несколько задач, появляется возможность совмещения вычислений одной задачи с операциями ввода-вывода другой. Пока одна задача ожидает какого-либо события (разблокирования файла, загрузки страницы или завершения операции ввода-вывода), процессор не простаивает, как при последовательном выполнении программ, а выполняет другую задачу.
Часто общее время выполнения смеси задач оказывается меньше, чем их суммарное время при последовательном выполнении. При этом выполнение отдельной задачи в мультипрограммном режиме может занять больше времени, чем при монопольном выделении процессора этой задаче. При совместном использовании процессора в системе могут возникать ситуации, когда задача готова выполняться, но процессор в это время занят выполнением другой задачи. В этом случае задача, завершившая ввод-вывод, готова выполняться, но вынуждена ждать освобождения процессора, что удлиняет время ее выполнения. Так, на рисунке 7.3 видно, что в однопрограммном режиме задача А выполняется за 6 единиц времени, а в мультипрограммном – 7. Задача В также вместо 5 единиц времени выполняется за 6. Зато суммарное время выполнения обеих задач в мультипрограммном режиме составляет всего 8 единиц, а в однопрограммном – 11.
В системах пакетной обработки переключение процессора с выполнения одной задачи на выполнение другой происходит по инициативе активной задачи – активная задача отказывается от процессора из-за необходимости выполнения операции ввода-вывода.
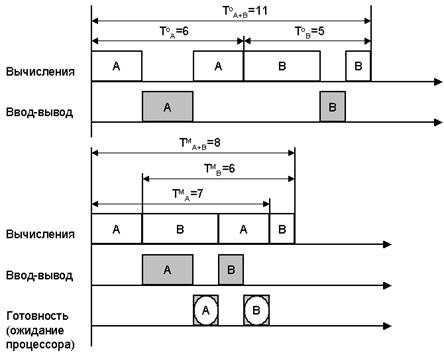
Рисунок 7.3 – Время выполнения двух задач в однопрограммной системе (О) и в мультипрограммной системе (М)
Этот механизм определяет высокую вероятность того, что одна задача может надолго занять процессор и выполнение других задач прекратится.
Очевидно, что пакетная система повышает эффективность использования аппаратных средств, но делает невозможной работу в интерактивном режиме.
7.2.3 Мультипрограммирование в системах разделения времени —
В системах разделения времени одному или нескольким пользователям предоставляется возможность одновременной интерактивной работы с несколькими приложениями. Для этого каждое приложение периодически должно общаться с пользователем. Очевидно, что системы пакетной обработки не могут предоставить такую возможность.
Для реализации систем разделения времени обычно используется «вытесняющая» многозадачность, при которой операционная система периодически принудительно приостанавливает каждое приложение, не дожидаясь, когда оно добровольно отдаст управление системе. В этом случае каждое приложение периодически получает квант времени для обработки, поэтому каждое из этих приложений может поддерживать диалог с пользователем.
В системах разделения времени, в отличие от систем пакетной обработки, пользователь продолжает общаться со своим приложением на протяжении всего времени его обработки. Это позволяет обнаруживать и исправлять ошибки, вводить данные и получать результаты в реальном времени.
Каждому пользователю в этом случае предоставляется отдельный терминал, а его приложение периодически получает квант времени, в течение которого оно обрабатывается центральным процессором. Так как каждой задаче выделяется только квант процессорного времени, ни одно приложение не может занять процессор надолго, и время реакции системы оказывается приемлемым. Если квант времени достаточно мал, то при достаточной производительности вычислительной системы и соответствующем количестве одновременно работающих пользователей у всех одновременно работающих пользователей создается впечатление монопольного владения вычислительной системой.
Понятно, что системы разделения времени значительно менее эффективны с точки зрения загрузки центрального процессора и устройств системы, чем системы пакетной обработки. Это связано с тем, что в каждый момент времени выполняется не то приложение, которое наиболее эффективно загрузит систему, а приложение, чья очередь подошла на получение очередного кванта времени. Дополнительное снижение производительности происходит из-за необходимости более частого переключения процессора с приложения на приложение – это требует частого переключения контекста процессов, что существенно увеличивает накладные расходы системы.
С другой стороны, использование систем разделения времени повышает эффективность использования вычислительной системы по сравнению с монопольным режимом, так как без заметного ухудшения характеристик обслуживания пользователей система одновременно обслуживает несколько (иногда довольно много) пользователей.
7.2.4 Мультипрограммирование в системах реального времени —
Системы реального времени используются обычно для управления различными техническими объектами (например, станком, спутником, измерительной установкой, баллистической ракетой) или технологическими процессами (например, стекловаренной печью, мартеновской печью, сборочным конвейером, ядерным реактором). Во всех указанных случаях существует предельно допустимое время, в течение которого должна быть выполнена та или иная процедура управления объектом – время реакции системы. Если процедура не будет выполнена за максимально отведенное время, возможны нежелательные, а, возможно, и катастрофические последствия (испорченная деталь на станке, потерянный спутник, вышедшая из строя мартеновская печь, вышедший из повиновения ядерный реактор). Таким образом, критерием эффективности такого типа системы является способность ее выдерживать заданные интервалы времени между запуском некоторой программы и получением результата ее работы (управляющего воздействия на объект). Это время называется временем реакции системы, а соответствующее свойство системы – реактивностью. Конкретные требования ко времени реакции могут быть совершенно различны. Так, при управлении спутником требуемое время реакции может составлять единицы миллисекунд, при управлении стекловаренной печью – единицы минут, а при управлении картофелехранилищем – часы. То есть, система реального времени – это не обязательно быстрая система, но обязательно система, обеспечивающая время реакции не более заданного.
В системах реального времени мультипрограммная смесь представляет собой фиксированный набор заранее разработанных предсказуемых программ. Выбор конкретной программы производится по прерываниям от объекта или в соответствии с планом.
Способность аппаратуры компьютера и операционной системы к гарантированно быстрому ответу зависит от скорости переключения с одной задачи на другую, которая в свою очередь существенно зависит от скорости обработки сигналов прерывания. Если при возникновении прерывания процессор с помощью опроса выясняет, кто именно вызвал прерывание, реакция системы может оказаться чрезмерно медленной.
Для ускорения обработки прерываний используют так называемые векторные прерывания. Они называются векторными потому, что каждому источнику прерывания соответствует свой вектор – адрес, по которому находится процедура обработки именно этого прерывания. Для того, чтобы сопоставить каждому сигналу прерывания его собственную процедуру обработки используются специальные аппаратные устройства, называемые контроллерами прерываний. Помимо уже упомянутого механизма генерации соответствующего вектора прерывания эти контроллеры позволяют использовать различные механизмы управления приоритетами прерываний, а также позволяют маскировать отдельные сигналы прерываний. Создание механизма векторных прерываний позволило существенно ускорить процесс обработки прерываний и улучшить реактивную способность соответствующих операционных систем. В первую очередь системы векторных прерываний были использованы в управляющих вычислительных системах. Затем, по мере удешевления аппаратуры этот механизм стал использоваться повсеместно.
Перед проектировщиками систем реального времени не стоит цель максимально эффективно использовать аппаратные средства. Напротив, при проектировании таких систем процессор обычно выбирается с достаточно большим запасом, чтобы даже при возникновении пиковых нагрузок система справлялась со своими задачами.
Здесь следует отметить, что повсеместно используемый подход к проектированию «обычных» вычислительных систем, основанный на оценке средней нагрузки, средней интенсивности заявок, среднего времени ожидания и т. д. совершенно не подходит к управляющим системам – системам реального времени. Эти системы должны проектироваться из учета возможности возникновения наихудшего сочетания условий при эксплуатации. Это приводит к тому, что управляющая вычислительная система большую часть времени будет бездействовать, а следовательно, средняя загрузка аппаратных средств будет очень малой. Это неизбежная плата за то, что в случае возникновения нештатной (аварийной) ситуации система сработает правильно, и технологический процесс не будет нарушен. Если не придерживаться такого подхода к управляющим системам реального времени, неизбежны новые чернобыли.
|
|
|
|
|
Дата добавления: 2014-11-25; Просмотров: 3457; Нарушение авторских прав?; Мы поможем в написании вашей работы!