КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Системи автоматичного регулювання
|
|
|
|
4.1.4.1 Принципи регулювання. Відмітною особливістю САР по відношенню до системи автоматичного контролю і системи автоматичного керування являється її робота лише з одним технологічним параметром і відповідно з одним виконавчим механізмом, впливаючим на цей параметр.
Завдання САР — підтримка постійного значення регулюємого параметра або його зміна за заданим законом.
Робота систем автоматичного регулювання заснована на двох основних принципах регулювання:
1) по відхиленню регульованого параметра від заданого значення або закону;
2) по компенсації зовнішніх збуджуючих впливів на технологічний процес.
У першому випадку автоматична система повинна стежити за значенням параметра і при його відхиленні від заданого створювати таку дію на виконавчий механізм, який забезпечить повернення параметра до потрібного значення.
Звідки система знає, яким має бути значення параметра? Для введення в систему цієї інформації використовують пристрій, який називається задатчиком. Він формує такий же сигнал, який поступає з датчика при значенні регульованого параметра, рівному заданому. Якщо відхилення параметра немає, то обидва сигнали однакові і система регулювання знаходиться в рівновазі. При відхиленні значення параметра від заданого, викликаним збуджуючим впливом на технологічний процес, спеціальний пристрій порівняння виявляє різницю між сигналами, посилює її, перетворює на двійковий код і передає на ЕОМ, який формує керуючий вплив, на виконавчий механізм.
Сукупність пристрою порівняння, підсилювача, аналого-цифрового перетворювача і ЕОМ, роль якої, як правило, виконує мікропроцесор, можна розглядати як регулюючий пристрій ( рисунок 14).
Виконавчий механізм керує робочим органом, який впливає на технологічний процес, так, щоб відхилений параметр від заданого значення не зменшувався. Дія продовжується до тих пір, поки реальне значення регульованого параметра не стане знову рівним заданому. Якщо задане значення параметра (і відповідно сигнал, що поступає від задатчика) не змінюється з часом, то система називається стабілізуючою.
Якщо сигнал, що формується задатчиком, змінюється за яким не будь законом, то система регулювання стежить за тим, щоб сигнал з датчика параметра змінювався так само, тобто, щоб пар-метр змінювався за тим же законом. Задатчик задає той закон, по якому повинен змінюватися параметр. Можливі два варіанти формування такого сигналу задатчиком: або відповідно до заздалегідь складеної програми зміни параметра з перебігом часу (в цьому випадку САР називають системою програмного регулювання), або залежно від зміни якогось іншого параметра, за якою стежить задатчик (в цьому випадку називають слідкуючою САР). У будь-якому випадку дії системи направлені на усунення відхилення параметра від значення (постійного або що змінюється), визначеного задатчиком.
На рисунку 14, а показана структура технічних засобів САР по відхиленню параметра.
Гідність регулювання по відхиленню полягає в тому, що регульований параметр завжди знаходиться під контролем автоматичної системи. Але є і недолік — процес регулювання починається лише тоді, коли відхилення параметра від заданої величини вже не лише з'явилося, але і досягло порогу чутливості пристрою порівняння. Наприклад, в приміщенні встановлена система автоматичного регулювання температури по відхиленню. До тих пір, поки не з'явився зовнішній вплив, температура дорівнює 20 °С. Датчик температури встановлений в центрі приміщення. Хтось відкрив вікно на вулицю, де температура рівна — 20 °С. Температура біля відкритого вікна починає різко падати, проте в центрі кімнати вона ще не змінилася, отже, регулятор доки не діє.
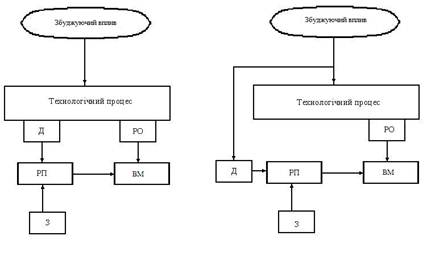
Рисунок 14 - Структура технічних засобів САР по відхиленню (а) і по збудженню (б)
Тільки після того, як в половині приміщення похолоднішає і температура почне падати вбли-зі датчика, регулятор вступить в дію.
Цей недолік регулювання по відхиленню відсутній в системі регулювання по компенсації збуджуючих впливів. Структура технічних засобів такої системи приведена на рисунку 14, б.
Її відмінність від попередньої структури полягає в тому, що на датчик впливає не параметр технологічного процесу, а зовнішнє збудження. Звичайний збуджуючий вплив на технологічні параметри проявляється з деякою затримкою, що дозволяє виробити регулюючу дію на робочий орган ще до того, як параметр під дією збудження змінить своє значення.
При регулюванні температури в приміщенні можна піти і по шляху компенсації збуджуючого впливу. Потім відкриття вікна система отримує інформацію про те, наскільки воно відкрите, яка площа вікна, яка температура за вікном і так далі. На основі отриманої інформації вона виробляє керуючу дію на нагрівач ще до того, як регульований параметр (температура в центрі кімнати) змінить своє значення.
Така оперативність є перевагою цього принципу регулювання, але відсутність безпосереднього контролю самого регульованого параметра — його недолік.
Найбільш досконалі комбіновані САР, що використовують одночасно обидва принципи регулювання. При цьому зберігаються переваги обох принципів і зменшуються їх недоліки.
Особливий вид САР — системи адаптивного регулювання. Вони використовуються для підтримки оптимальних режимів тих технологічних процесів, для яких може бути визначений пока-зник ефективності процесу. Якщо цей показник залежить від параметрів, які система може врахувати, то з'являється можливість добитися максимального значення ефективності. Адаптивна система автоматично регулювання керує процесом залежно від комплексу таких дій на нього, врахувати які окремо неможливо (зміна якості сировини, відкладення на стінках трубопроводу і так далі).
Працює адаптивна САР таким чином: ЕОМ змінює на невелику величину параметри в алгоритмах керування і обчислює показник ефективності при нових значеннях параметрів. Якщо показник росте, то ЕОМ знову змінює параметри в тому ж напрямі і знову обчислює показник ефективності. І так до тих пір, поки не буде досягнута максимальна ефективність. Періодичне проведення такої корекції забезпечує оптимальний режим технологічного процесу і роботи технологічного устаткування.
4.1.4.2 Стійкість систем автоматичного регулювання. Будь-яка система автоматичного регулювання повинна підтримувати регульований параметр з максимальною точністю, тобто з найменшим відхиленням від заданого значення. Це досягається зазвичай за рахунок підвищення чутливості пристрою порівняння. Проте надмірне підвищення чутливості може привести до втрати стійкості системи і виникнення коливань.
Дійсно, якщо в системі регулювання висоти польоту літака чутливість занадто висока, то навіть при незначних відхиленнях літака від заданої висоти на рульові органи поступає великий сигнал, що викликає їх відхилення на великий кут. Літак має значну інерційність, а значить, продовжує реагувати на цей сигнал і змінювати висоту польоту, навіть якщо сигнал вже закінчився, а може бути, навіть змінив свій шаг на зворотний. Кінець кінцем це веде до збільшення амплітуди коливань висоти польоту і втрати стійкості.
Стійкість — це здатність системи самостійно вертатись в стан рівноваги після припинення дії на неї.
Процес переходу системи в новий стан після збуджуючої дії на неї (чи повернення системи до колишнього стану після припинення дії) називається перехідним процесом. Поведінку системи в перехідному процесі відбиває її стійкість. Якщо при дуже малих діях в систеие виникають коливання з усе зростаючою амплітудою, то така система є нестійкою. Система, в якій коливання не виникають або виникаючі коливання затухають в процесі її повернення до стану рівноваги, вважається стійкою. На самій межі стійкості в системі можуть виникнути незгасаючі коливання з постійною невеликою амплітудою.
Якість регулювання оцінюється двома показниками: найбільшим відхиленням Атах регульованого параметра від необхідного значення під час перехідного процесу і часом регулювання tр(рисунок 15). Час регулювання відлічується з моменту вступу збуджуючого впливу Хвх(t) на вхід системи до моменту закінчення перехідного процесу, коли регульований параметр Хвих(t) відрізнятиметься від необхідного значення на дуже малу величину (так звана зона нечутливості).
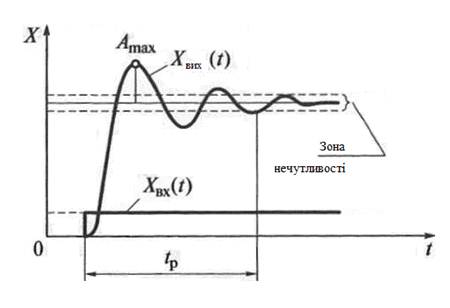
Рисунок 15 - Перехідною процес в системі автоматичного регулювання
4.1.4.3 Характеристики ланок САР. Система автоматичного регулювання є сукупністю окремих елементів і технічних засобів: датчиків, підсилювачів, перетворювачів, пристрої пам’яті, виконавчих механізмів і робочих органів. У автоматиці кожне з них називають ланкою і розглядають з точки зору їх реакції на вхідну дію.
Реакція може бути різною. Наприклад, зміна сигналу на вході електронного підсилювача, працюючого в лінійному режимі, призводить до пропорційної зміни сигналу на його виході, отже, електронний підсилювач — пропорційна ланка.
Зміна сигналу на вході виконавчого механізму, наприклад електричного двигуна, призводить зазвичай до плавної зміни частоти обертання до нового значення. Так проявляються інерційні властивості двигуна, отже, електричний двигун — інерційна ланка.
При цьому не має значення, яка фізична природа ланцюгів або їх конструктивне виконання, головне — як змінюється вихідна величина Хвих(при тій або іншій дії Хвх) на вході ланки.
Відношення вихідної величини до вхідної називається передуточною функцією, а характер зміни вихідної величини в часі при прямокутній дії на вході ланки (перехідний процес) називається перехідною характеристикою ланки. Якщо відома перехідна характеристика, то можна вичислити, реакцію ланки на будь-яку вхідну дію і прогнозовану поведінку системи.
У системах автоматичного регулювання розрізняють п'ять типів ланок:
- пропорційне;
- інерційне;
- інтегруюче;
- диференціююче;
- коливальне.
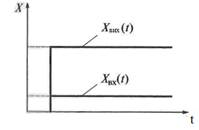
У пропорційній ланці вихідна величина повторює без спотворень і запізнювання вхідну величину (рисунок 16, а). У якості прикладів пропорційних ланок можна привести дільник напруги, що складається з двох резисторів (напруга на кожному резисторі в точності повторює напругу, поданої на дільник, але менше його за значенням); важіль (переміщення одного кінця важеля повторює в масштабі переміщення другого його кінця).
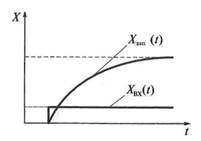
У інерційній ланці при стрибкоподібній зміні вхідної величини вихідна величина прагне до нового установленого значення за експоненціальним законом (рисунок 16, б). Цей закон виражає інерційність ланки, яка призводить до затримки реакції ланки на зовнішню дію.
У реальних ланках інерційність обумовлена наявністю в ланці великої маси, моменту інерції або електричної місткості. Наприклад, чим більше момент інерції ротора двигуна, тим довше він розганятиметься до сталої частоти обертання при подачі на нього напруга живлення в якості вхідної дії. Чим більше місткість конденсатора, тим довше він заряджатиметься до величини прикладеної напруги.
У інтегруючій ланці вихідна величина пропорційна інтегралу від вхідної величини. Відомо, що інтеграл постійної величини є лінійно (тобто рівномірно) увенчивающуюся або величину, що зменшується, причому чим больша вхідна величина, тим більша швидкість зміни вихідної еличини (рисунок 17).
а б
Рисунок 16 - Перехідні характеристики пропорційної (а) і інерційної (б) ланок
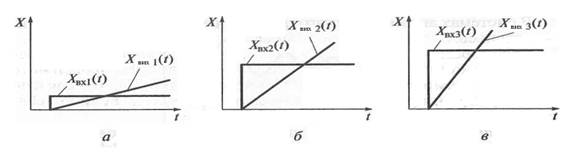
Рисунок 17 - Перехідні характеристики (а... в) інтегруючої ланки при різних значеннях вхідної величини
Якщо вхідна величина миттєво змінюється від одного постійного значення до іншого, то вихідна величина росте або убуває лінійно з утлому нахилу, залежним від стрибка значення вхідної величини (наприклад, напруга на конденсаторі в електричному ланцюзі змінюється пропорційно інтегралу від струму заряду конденсатора, що розглядається як вхідний вплив).
У диференціюючій ланці вихідна величина пропорційна похідній (диференціалу) від вхідної величини. Похідна від будь-якої величини, що змінюється з часом, дорівнює швидкості її зміни (рисунок 18, а). Чим більше швидкість зміни сигналу на вході, тим більше значення вихідної величини. Якщо вхідна величина змінюється ступінчасто (стрибком), тобто з величезною швидкістю, то значення сигналу на виході теоретично стає нескінченно великим. Насправді існують різні причини, які обмежують і швидкість зміни вхідного сигналу, і максимальне значення вихідного сигналу. В якості прикладу диференціюючої ланки можна привести ЛС-ланцюжок (рисунок 18, б), що складається з резистора і конденсатора і широко застосовується в електроніці для отримання коротких імпульсів.
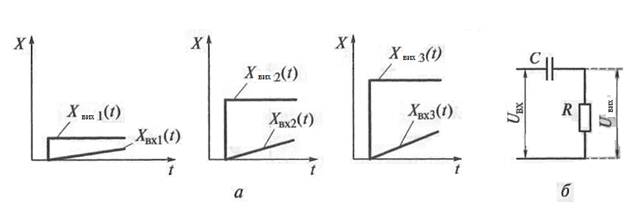
Рисунок 18 - Диференційна ланка: а — перехідні характеристики; б — ЛС-ланцюжок
У коливальній ланці стрибкоподібна дія на вході призводить до коливань вихідної величини відносно нового сталого значення. На рисунку19, а показана реальна перехідна характеристика, що відрізняється наявністю початкової ділянки повільного наростання вихідної величини, що пов'язано з неминучою інерційністю реальних об'єктів. Якщо коливання затухають, то ланка є стійкою.
В якості прикладу можна привести пружинний амортизатор автомобіля: коли в кузов поміщають вантаж, кузов разом з вантажем просідає і здійснює декілька коливань перш, ніж установится в стійке положення. Інерційність ланки проявляється в тому, що, коли вантаж торкається кузова, в першу мить із-за інерції вони починають рух вниз повільно, потім усе більше прискорюються під тяжкістю вантажу і одночасно починають сприймати дію амортизатора. В якості прикладу можна також привести коливальний контур, що складається з конденсатора С і котушки індуктивності L (рисунок 19, б). При подачі на цей ланцюг напруги в ній виникають коливання, які затухають тим швидше, чим більше активний опір котушки До.
Така різноманітність характеристик ланок дозволяє створювати системи автоматичного регулювання з різними впливами на робочі органи технологічного процесу в залежності від виду регульованого параметра і впливу цього параметра на властивості кінцевого продукту.
При відхиленні регульованого параметра від заданого значення дію на робочий орган організовують по одному з чотирьох законів регулювання:
• інтегральний (І-регулятор);
• пропорційний (П-регулятор);
• пропорційно-інтегральний (ПІ-регулятор);
• пропорційно-интегрально-диференціальний (ПІД-рсгулятор).
Інтегральний регулятор формує дію на робочий орган, яка лінійно зростає або убуває до тих пір, поки регульований параметр не повернеться до заданого значення. Ці регулятори найбільш прості в реалізації, але процес регулювання носить коливальний характер і система може виявитися нестійкою.
Пропорційний регулятор впливає на робочий орган тим сильніше, чим більше відхилення регульованого параметра від заданного значення. Стійкість таких регуляторів вища, ніж ін-тегральна, але їм властива так звана статична похибка, тобто. після відробітку вхідної дії нове встановлене значення параметра завжди трохи відрізняється від заданного.
Пропорційно-інтегральний регулятор поєднує обоє способа регулювання. Робочий орган сприймає сумарну взаємодію, тому в Пі-регуляторах досягається висока бистродія, забезпечується стійкість регулювання і відсутня статична погрішність. Саме Пі-регулятори широко застосовуються при автоматизації технологічних процесів.
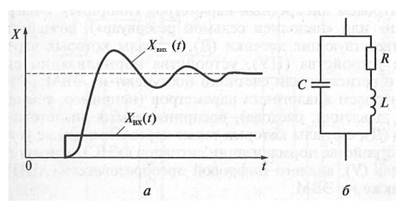
Рисунок 19 - Коливальна ланка: а — реальна перехідна характеристика; б — коливальний контур
У пропорційно-інтегрально-диференційних регуляторах до дії на робочий орган, що формується Пі-регулятором, додається та, що становить, пропорційна швидкості зміни відхилення регульованого параметра від заданого значення. Це забезпечує найбільшу ефективність ПІД-регуляторів, але у них складна наладка.
Реальні автоматичні системи, що ведуть технологічні процеси, включають системи і автоматичного контролю, і автоматичного керування, і автоматичного регулювання в самих різних поєднаннях і об'ємах. Узагальнена структурна схема комплексу технічних засобів автоматичної сис-теми приведена на рисунку 20, тут технологічний процес супроводжується:
· контролем дискретних параметрів (наприклад, «нагрівач включений» або «наповнений сьомний резервуар»), що впливають на відповідні датчики (Д), сигнали яких через перехідні пристрої (ПП), пристрої нормалізації сигналів (ПНС) і регістри або лічильники поступають на ЕОМ;
· контролем аналогових параметрів (наприклад, температури, рівня, тиску, витрати), що сприймаються аналоговими датчиками (Д), сигнали яких також через перехідні пристрої (ПП), пристрої нормалізації сигналів (ПНС), комутатор (К), підсилювач (П), аналого-цифровий перетворювач (АЦП) поступают також на ЕОМ;
· підтримкою окремих параметрів (на схемі — одного) на заданому рівні за допомогою регулятора, в якому значення регулюємого параметра за допомогою датчика (Д) передається через ПП на регулюючий пристрій (РП), де порівнюється з сигналом від задатчика (3). Вихідний сигнал РУ поступає (через ПУ) на виконавчий механізм (ВМ), який впливає на робочі органи (РО) так, щоб при порушенні рівноваги повернути параметр в початковий стан;
· виробленням ЕОМ на основі аналізу стану технологічного процесу і технологічного устаткування дискретних керуючих дій (наприклад, «включити нагрівач № 2» або «відкрити клапан № 5»), які через вихідні регістри і ПУ поступають на старанні механізми (наприклад, элект-ромагнитное реле або електромагніт) і приводять в дію дискретні РО (наприклад, електронагрівач або пневмоэлектро-клапан);
· виробленням ЕОМ на основі аналізу стану технологічного процесу і технологічного устаткування аналогових керуючих дій (наприклад, «знизити рівень Н2» і «підняти тиск Р4»), які через цифроаналоговий перетворювач (ЦАП) і комутатор поступають на пристрої (ЗУ), що запам'ятовують, і далі через ПУ управляють роботою ВМ (наприклад, «включити електродвигун ЭД2 проти годинникової стрілки на 1,2 з» і «перемістити шток пневмопривода ПП4 на 0,64 мм), котрі, у свою чергу, приводять в дію аналогові РО (наприклад, вентиль В2 і засувку 34).
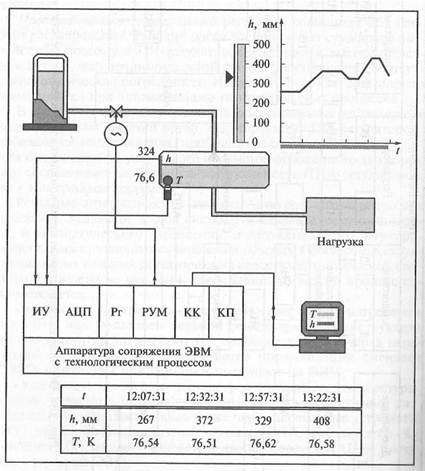
Оператор отримує усю необхідну інформацію про протікання технологічного процесу і стан технологічного устаткування (рисунок 21). Вона представляється йому у вигляді таблиць, графіків, діаграм і мнемосхем як на екранах дисплеїв, так і на паперових носіях.
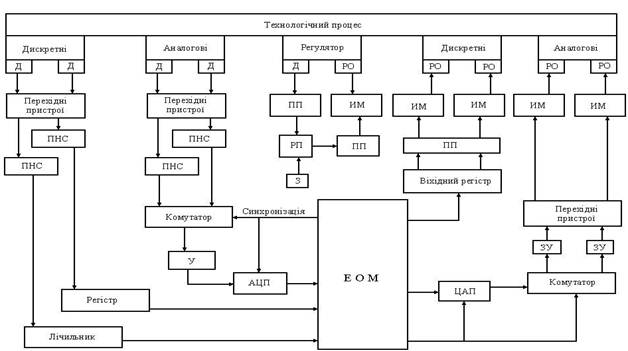
Рисунок 20 – Узагальнена структурна схема комплексу технічних засобів автоматичної системи
|
Рисунок 21 - Уявлення інформації про технологічний процес на дисплеї оператора
|
|
|
|
|
Дата добавления: 2014-11-26; Просмотров: 5898; Нарушение авторских прав?; Мы поможем в написании вашей работы!