КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Додаток 3 – Історія механізації виробництва
|
|
|
|
У промисловості перші автоматичні пристрої стали використовуватися в XVIII в., наприклад, автоматичний супорт А.К. Нестерова для токарно-копіювальних станків (1720 м.); плавункові регулювальник рівня води в казані І.І. Ползунова (1765 м.); відцентровий регулювальник Дж. Уатта (G.Watt) (1784 м.).
XIX вік ознаменований появою автоматичних пристроїв, діючих завдяки електрисиці - це і магнитноелектричне реле П.Шиллінга (P.Shelleng) (1830 м.). Список цей довгий і плавно переходить у вік XX, коли всемогутня електроніка дозволила створити принципово нові електронні автоматичні пристрої.
Уперше слово «робот» прозвучало в 1920 р. У знаменитій п'єсі чеського письменника Карела Чапека «R.U.R.». Сьогодні існують три різновиди роботів: з жорсткою програмою дії, керовані операторами і діючі цілеспрямовано без втручання людини.
Широке застосування роботів з жорсткою програмою дії і роботів, керованих операторами знайшли своє застосування в машинобудуванні, виробництві электронники, і інших виробництвах з використанням різного роду конвеєрного виробництва.
До таких компаній можна віднести гіганта машинобудування компанію «Тойота». У її виробництві застосовуються перших два типи роботів на виробництві і третій тип в організації виробництва автомобілів, танкерів і т.д. Використання даних технологій дозволило скоротити час на виробництво одиниці продукції, а також заощадити фінансові кошти.
Пересвідчившись в тому, що досягати зовнішньої схожості робота з людиною абсолютно безглуздо, інженери перестали створювати роботів, схожих на людей. Технічно більш цікаво і складно «навчити» робота рухатися. Так, наприклад, така проста на перший погляд деталь, як крокуючі ноги, обертається надто складною технічною задачею. «Примусити» робота ходити на двох ногах справа складно виконуюча, куди простіше навчити робота пересуватися на чотирьох (як тварини), шести (як комахи) або восьми ногах, тоді рівновагу тримати значно простіше. Наприклад, однією з останніх розробок двох великих американських компаній Rockwell International і US Robotics з'явився робот, названий ALUV (Autonomius Legged Underwater Vehicle), що дослівно означає «автономний крокуючий підводний транспортний засіб», а точніше робот-тральщик. Зовні він нагадує морського краба з шістьма ногами. Висота робота трохи більше півметра, а важить він біля 10,5 кг. «Гуляючи» по морському дну, «краб» досліджує все, до чого торкається. Його коренасті суглобисті ноги усіяні датчиками аналогами всіляких рецепторів. Віртуозно чіпляючись за грунт при великій хвилі, робот навіть в шторм може виконувати свої «службові» обов'язки - шукати міни. Якщо хвилювання дуже сильне, кінцівки робота починають вібрувати і він занурюється в грунт. Роботи-краби можуть працювати і не поодинці - десант розповзається по мілководдю і прочісує дно. До кінця розвідки загін металевих крабів значно зменшується. Підірвавшись на знайдених мінах, електронні сапери розчищають шлях людям. Щоб підвищити ефективність роботи роботів, розробники збираються вдосконалювати їх. Роботи чергової моделі будуть підтримувати зв'язок не тільки з оператором, але і між собою.
|
|
|
Існує ще одна проблема стійкість робота. Падіння - досить велика проблема, що чекає робота щокроку. Іноді творцям роботів необхідно вчити своїх «вихованців» самостійно підійматися на ноги, добре якщо хто-небудь може підняти апарат, що звалився, а що робити якщо робот проводить дослідження і роботи на Марсі? Легко встояти, якщо маєш форму, наприклад, багатогранника, а замість двох нижніх кінцівок-пристрів можуть забезпечити більша кількість щупало видних кінцівок. «Biper 3» - механізм японського інженера-конструктора Ісао Шимоями (Esao Shemoyama) з Токкийського університету рухається за допомогою деякої подібності ходуль, а якщо зупинився, вмить втрачає рівновагу. Легше дається ходьба його «співвітчизнику» - роботу „Leg-12" він навчається мистецтву втриманню рівноваги при ходьбі під керівництвом людини. Його винахідник Ациу Таканіси (Atsue Takanese) сподівається, що, закінчивши курс тренування, робот зможе ходити самостійно.
|
|
|
Рідні Брукс, завідуючий лабораторією штучного інтелекту Массачусетського технологічного інституту, вирішив власноручно виправити існуюче становище, який почав роботи по створенню робота, подібному Homo sapiens не тільки зовні, але і здатного мислити. Правда, поки що GOS, а саме так названий новий робот, віддалено нагадує андроїда, який має всього лише голову на плечах та верхню частину торса. Жоден витвір рук людських ще не був такий близький до створення гуманоїдних роботів. Могутній мозок GOSа, сконструйований з чипів Motorola 68332 (кожен з низ рівноцінний по продуктивності сучасному процесору, розташованому в окремій кімнаті). Робот може задіяти до 256 чипів одночасно, але частина з низ Брукс планує замінити цифровими процесорами. Хоча структура штучного мозку відмінна від людського, він здатний управляти безліччю різних функцій. Коли ця штучна дитина оволодіє зором, Брукс забезпечить його органами слуху, а умінню спілкуватися зі своїми творцями він буде вчитися тим же методом, що і людина по схемі «дія реакція батьків». Брукс сподівається навчити GOS відчувати втому і навіть біль, які одягають робота в обладнану сенсорами шкіру.
Спроби створення довершеного розумного робота напевно в майбутньому увінчаються успіхом. А поки ми можемо використовувати ці три типи роботів у виробництві, які все більш і більш замінюють людину.
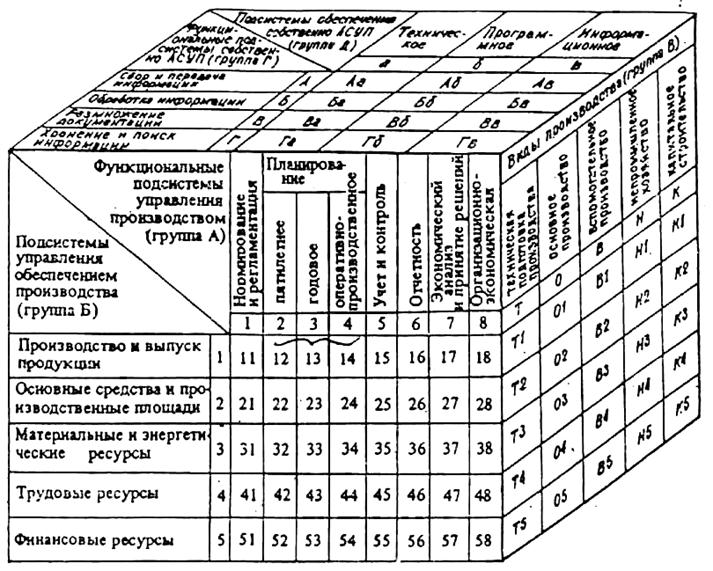
Додаток 4 - Структурна схема АСУП
|
|
|
|
|
Дата добавления: 2014-11-26; Просмотров: 572; Нарушение авторских прав?; Мы поможем в написании вашей работы!