КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Исходные данные для расчета гидропривода и их анализ
|
|
|
|
Основные параметры гидропривода определяются типом машины, для которой он предназначен. Поэтому перед проектированием необходимо иметь сведения о рабочем органе машины или механизма, режимах его движения и характеристиках внешней нагрузки. Необходимо иметь предварительную компоновку гидропривода.
По виду движения выходного звена можно выделить две основных группы гидроприводов: поступательного и вращательного движения.
Для гидропривода поступательного движения основные исходные данные следующие:
· Усилие на штоке гидроцилиндра R н;
· Скорость перемещения поршня гидроцилиндра V п;
· Ход поршня гидроцилиндра L п.
 Как правило, усилие R н и скорость V п при работе гидропривода могут изменяться во времени.
Как правило, усилие R н и скорость V п при работе гидропривода могут изменяться во времени.
В этом случае в качестве исходных данных могут использоваться циклограммы нагружения гидроцилиндра и его скоростей. Циклограммы нагружения гидроцилиндра и его скоростей могут быть различными. Пример таких циклограмм приведен на рис. 3.1.
Имеется ряд особенностей при проектировании гидроприводов с вращательной кинематической парой. Примером таких механизмов является привод подъема стрелы различных манипуляционных систем, начиная от экскаваторов и подъемных кранов и заканчиваю сложными робототехническими и мехатронными системами.
Приведем в качестве примера анализ такого механизма.
При управлении мехатронным модулем с вращательной кинематической парой часто используется привод поступательного действия, в частности, электрогидравлический с гидроцилиндрами. Целесообразность в таком приводе возникает при создании манипуляционных систем, работающих со значительными грузами. Примерами таких систем являются манипуляторы и роботы для стройиндустрии, горной промышленности. В этом случае к таким системам предъявляются особые требования по обеспечению точности позиционирования в пределах до 1-10 мм и стабильности скорости подъема-опускания.
Для определения конструктивных параметров мехатронного модуля и выбора структуры управления необходимо аргументировано подойти к вопросу о местах крепления управляющих гидроцилиндров, что сказывается, с одной стороны, на величину погрешности позиционирования, а с другой стороны, на саму возможность размещения гидроцилиндров, имеющих определенные геометрические размеры. В большинстве случаев при проведении исследований динамики таких систем считается, что нагрузка на шток гидроцилиндра является величиной постоянной, а скорость подъема или опускания звена манипулятора является неизменной. В действительности ввиду изменения геометрических параметров звена происходит перераспределение нагрузки на гидроцилиндр, что сказывается на изменении скорости движения его штока. Угловая скорость поворота звена мехатронного модуля при управлении только по положению звена зависит не только от изменения скорости движения штока при изменении нагрузки на последний, но и от самой геометрии крепления гидроцилиндра. Поэтому весьма актуальным является исследование процесса изменении нагрузок на шток при движении приводных гидроцилиндров, а также их влияние и влияние геометрических параметров на скорость поворота звена манипулирования.
Расчетная схема для одной степени подвижности мехатронного модуля с гидравлическим приводом приведена на рис. 3.2.
Отметим, что оптимальным с точки зрения минимизации суммарной среднеквадратичной кинематической погрешности является равенство длин ОА и ОВ. Поэтому целесообразно принять  .
.
При выборе угла β, определяющего неподвижную точку В крепления гидроцилиндра, необходимо учитывать следующее. Расстояние  , где
, где  – неизменяемая часть гидроцилиндра, включающая в себя конструкцию крепления, «мертвый» объем и часть штока;
– неизменяемая часть гидроцилиндра, включающая в себя конструкцию крепления, «мертвый» объем и часть штока;  – ход поршня гидроцилиндра, определяемый как
– ход поршня гидроцилиндра, определяемый как  , где
, где  ,
,  и
и  ,
,  – максимальный и минимальный угла наклона звена манипулятора. Как правило, величина составляет до 0,75 % от
– максимальный и минимальный угла наклона звена манипулятора. Как правило, величина составляет до 0,75 % от  . В этом случае величина β должна выбираться таким образом, чтобы выполнялось неравенство
. В этом случае величина β должна выбираться таким образом, чтобы выполнялось неравенство
 . (3.1)
. (3.1)
Рис. 3.2. Расчетная схема степени подвижности манипулятора
Из рис. 3.3, на котором приведено графическое решение этой задачи, видно, что условие (3.1) будет выполнено при  .
.
Из рис. 3.3 на основании выбора конструктивного угла β определяется ход поршня гидроцилиндра  . При этом следует иметь ввиду, что при больших значениях возможен изгиб штока. Малые значения получаются при
. При этом следует иметь ввиду, что при больших значениях возможен изгиб штока. Малые значения получаются при  и малых значениях
и малых значениях  . В то же время увеличение конструктивного угла β и минимизация конструктивного параметра отрицательно сказывается на точность позиционирования по углу φ в части ее кинематической составляющей (рис. 3). Из рис. 3.4 видно, что при углах наклона стрелы φ > 70º кинематическая составляющая погрешности позиционирования возрастает в 2-3 раза в зависимости от угла β и в 1,5-2 раза в зависимости от величины .
. В то же время увеличение конструктивного угла β и минимизация конструктивного параметра отрицательно сказывается на точность позиционирования по углу φ в части ее кинематической составляющей (рис. 3). Из рис. 3.4 видно, что при углах наклона стрелы φ > 70º кинематическая составляющая погрешности позиционирования возрастает в 2-3 раза в зависимости от угла β и в 1,5-2 раза в зависимости от величины .
Величина нагрузки на шток гидроцилиндра  в зависимости от угла поворота φ определится как
в зависимости от угла поворота φ определится как
 , (3.2)
, (3.2)
где  – приведенная вертикальная нагрузка от всех сил, действующих на звено манипулятора; γ – угол наклона гидроцилиндра, определяемый как
– приведенная вертикальная нагрузка от всех сил, действующих на звено манипулятора; γ – угол наклона гидроцилиндра, определяемый как
 или
или  .
.
Рис. 3.3. График для определения параметра β
 |
График зависимости (3.2) приведен на рис. 3.5, из которого видно, что изменение величины нагрузки на шток незначительное (
 1,2 раза).
1,2 раза).
Рис. 3.5. Изменение нагрузки на шток гидроцилиндра в зависимости от угла наклона звена
Угловая скорость звена манипулятора ω зв также является функцией угла наклона звена φ:
 , (3.3)
, (3.3)
где  – скорость перемещения поршня гидроцилиндра. График зависимости (3.3) при
– скорость перемещения поршня гидроцилиндра. График зависимости (3.3) при  и = 0,1 м/с приведен на рис. 3.6, из которого видно, что при изменении угла наклона звена от 0 до 75° его угловая скорость (при условии постоянства скорости ) изменяется более чем в 4 раза.
и = 0,1 м/с приведен на рис. 3.6, из которого видно, что при изменении угла наклона звена от 0 до 75° его угловая скорость (при условии постоянства скорости ) изменяется более чем в 4 раза.
Рис. 3.6. График изменения скорости звена
При расчете гидропривода проводится анализ исходных данных по циклограммам и определяются максимальное усилие на штоке гидроцилиндра и максимальная скорость перемещения поршня. В нашем случае максимальное усиление R H. МАХ = R H1, а максимальная скорость V п. мах = V п 3.
Для гидропривода вращательного движения основные исходные данные следующие:
· Момент на валу гидромотора М м;
· Частота вращения вала гидромотора n м.
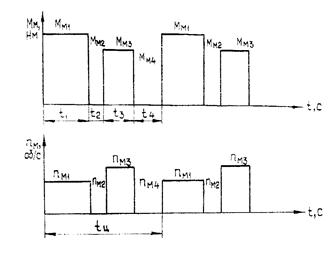
Оба эти параметра могут изменяться во времени с каким-то циклом. В этом случае в качестве исходных данных необходимо иметь циклограммы моментов гидромотора и его скоростей. Пример таких циклограмм приведен на рис. 3.7.
Для гидропривода вращательного движения определяются максимальный момент на валу гидромотора и максимальная частота его вала. В нашем случае этому критерию соответствуют
Мм . мах= Мм . 1 и n м. мах.= n м 3.
Кроме основных исходных данных для каждого вида гидропривода необходимо знать и дополнительные исходные данные, к которым можно отнести:
 – реверсивный гидропривод или нереверсивный;
– реверсивный гидропривод или нереверсивный;
– регулируемый или нерегулируемый;
– условия эксплуатации гидропривода (температура окружающей среды, требования по шуму и т. д.).
Анализ основных исходных данных позволит определиться с управляющим устройством гидропривода.
Рис.3.7.
Анализ дополнительных исходных данных позволит определить тип распределителя жидкости и частоту вращения гидронасоса.
|
|
|
|
|
Дата добавления: 2014-11-08; Просмотров: 1256; Нарушение авторских прав?; Мы поможем в написании вашей работы!