КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Методы уменьшения потерь на трение и уменьшения сил трения при заданных нагрузках
|
|
|
|

Рис. 15.4 – Методы уменьшения потерь на трение

Рис. 15.5 – Методы уменьшения сил трения при заданных нагрузках
Релаксационные автоколебания. Рассмотрим движение ползуна 1, связанного упругим звеном — пружиной 2 с ведущим звеном 3 привода, имеющим постоянную скорость  (рис. 15.6,а) при упрощенной характеристике трения (рис. 5.16,6). Сила трения при переходе от покоя к движению мгновенно изменяет свое значение от
(рис. 15.6,а) при упрощенной характеристике трения (рис. 5.16,6). Сила трения при переходе от покоя к движению мгновенно изменяет свое значение от  до
до  на величину
на величину  .
.
В начальный момент  , перемещение ползуна и скорость ползуна
, перемещение ползуна и скорость ползуна  ,
,  . При малой скорости задающего звена 3 возможна остановка ползуна. После остановки ползун некоторое время будет оставаться на месте до тех пор, пока продолжающееся перемещение ведущего звена не вызовет деформацию пружины 2 и увеличение силы ее натяжения до . Тогда произойдет срыв - скачок ползуна. После остановки ползуна начнется следующий цикл.
. При малой скорости задающего звена 3 возможна остановка ползуна. После остановки ползун некоторое время будет оставаться на месте до тех пор, пока продолжающееся перемещение ведущего звена не вызовет деформацию пружины 2 и увеличение силы ее натяжения до . Тогда произойдет срыв - скачок ползуна. После остановки ползуна начнется следующий цикл.
После срыва длина пружины изменится на величину  , а сила упругости пружины уменьшится до величины
, а сила упругости пружины уменьшится до величины  .
.
Уравнение движения ползуна
 , или
, или
 , (15.3)
, (15.3)
где  - маса повзуна;
- маса повзуна;  .
.
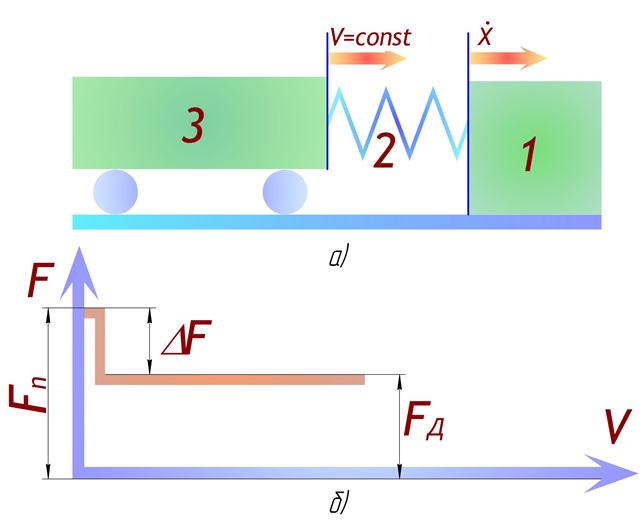
Рис. 15.6 - Схема приближённого расчёта и график упрощённой характеристики трения
Решение уравнения (15.3) при указанных начальных параметрах определяет закон перемещения ползуна
 , (15.4)
, (15.4)
А также закон изменения скорости ползуна
 . (15.5)
. (15.5)
Остановка ползуна соответствует условию и подстановке в уравнение (15.3) значения  . Обычно
. Обычно  весьма мало, поэтому приближенно
весьма мало, поэтому приближенно  ,
,  ,
,  , величина скачка ползуна
, величина скачка ползуна  .
.
Полное перемещение ползуна за время от момента срыва до остановки
 .
.
Продолжительность остановки ползуна
 .
.
Графики изменения во времени перемещений и скорости ползуна при скорости  ведущего звена показаны на рис. 15.7,а,в, а при скорости
ведущего звена показаны на рис. 15.7,а,в, а при скорости  на рис. 15.7, б, г.
на рис. 15.7, б, г.
|
|
|
При снижении скорости  ведущего звена возрастает продолжительность
ведущего звена возрастает продолжительность  остановки.
остановки.
При этой же упрощенной характеристике трения, но при наличии в системе демпфирования, пропорционального скорости, уравнение движения ползуна
 ,
,
или
 ,
,
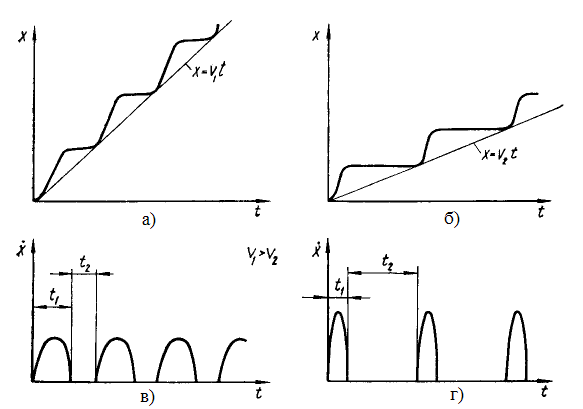
Рис. 15.7 – Графика процесса релаксационных колебаний
где  - коэффициент демпфирования;
- коэффициент демпфирования;  - относительный коэффициент демпфирования.
- относительный коэффициент демпфирования.
При значительной скорости ведущего звена ползун движется непрерывно без остановок, а при малой скорости ползун перемещается с остановками и периодическими скачками. Для данной УС существует критическая скорость  , ниже которой ползун движется скачкообразно. Критическая скорость определяется из условия равенства нулю скорости
, ниже которой ползун движется скачкообразно. Критическая скорость определяется из условия равенства нулю скорости  и ускорения
и ускорения  , чему соответствует
, чему соответствует  .
.
Приближенно критическая скорость определяется следующим выражением:
 ,
,
где  - относительное рассеяние энергии при колебаниях.
- относительное рассеяние энергии при колебаниях.
Ориентировочные значения  в направляющих: скольжения 0,8...1,0; качения 0,4...0,6; гидростатических 1,5...2,0.
в направляющих: скольжения 0,8...1,0; качения 0,4...0,6; гидростатических 1,5...2,0.
При скорости ползуна ниже критической и постоянном коэффициенте жесткости привода скачки ползуна будут иметь одинаковые величины. Если коэффициент жесткости изменяется по мере перемещения ползуна, то скачки уменьшаются при увеличении коэффициента жесткости или увеличиваются при уменьшении его.
Уточненный расчет характеристик плавности перемещения узла станка в направляющих скольжения должен учитывать: динамические характеристики процесса трения, влияние схемы нагружения узла (в частности, зависимость силы трения от движущей силы), а также влияние изменения параметров системы в процессе перемещения узла.
|
|
|
|
|
Дата добавления: 2014-11-18; Просмотров: 747; Нарушение авторских прав?; Мы поможем в написании вашей работы!