КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Энергетическая диаграмма, вращающий момент асинхронного двигателя
|
|
|
|
Вращающий (электромагнитный) момент асинхронной машины
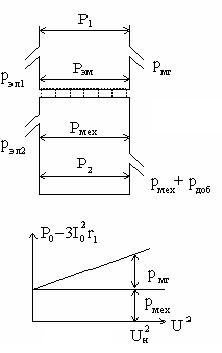
Для вывода формулы этого момента предварительно рассмотрим энергетическую диаграмму асинхронного двигателя (рис.114).
1. Активная потребляемая мощность из сети
|

2. В статоре имеются потери в обмотках

и магнитные потери Рмг, которые определяются из опыта холостого хода (рис. 115).
3. Рэм – электромагнитная мощность
 ,
,
она электромагнитным путем передается на ротор. В роторе потерями в стали пренебрегаем, т.к. f = (2 - 3)Гц.
|

Мощность на валу

КПД - 
М - электромагнитный момент, создаваемый в результате взаимодействия вращающего магнитного поля с током в роторе (предварительное определение). Электромагнитный момент двигателя должен уравновесить момент на валу – М2 и момент холостого хода М = М2 + М0.
Выразим электромагнитную и полную механическую мощность через электромагнитный момент.
Pэм = M×w1,
где w1 - угловая скорость поля статора.
Pмех = M×w,
где w - угловая скорость ротора.
Потери в обмотке ротора

итак  .
.
Потери в меди (алюминии) обмотки ротора зависят от электромагнитной мощности и скольжения и прямо от параметров не зависят. Для уменьшения этих потерь номинальное скольжение должно быть как можно меньше.
Исходя из этого выражения, получим формулу электромагнитного момента
 , откуда
, откуда  (1).
(1).
Используя Г-образную схему замещения получим
 (2)
(2)
 Подставив уравнение (2) в уравнение (1) получим
Подставив уравнение (2) в уравнение (1) получим
|
 , тогда
, тогда
|
 . Зависимость M = f(S)
. Зависимость M = f(S)
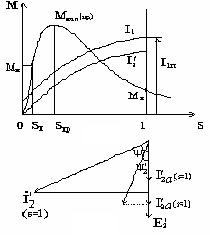
Зависимость электромагнитного момента от скольжения называется механической характеристикой. Из выражения видно, что электромагнитный момент асинхронного двигателя зависит от квадрата подведенного напряжения, т.е. если U уменьшить на 10%, то момент уменьшится на 19%. При постоянных параметрах схемы замещения зависимость М электромагнитного момента от скольжения представлена на рис. 116
Пояснение зависимости M = f(S).
Область от S = 0 ¸ Sкр
При малом скольжении X2S» 0, тогда ток в роторе  активному току, с увеличением S
активному току, с увеличением S 
 M
M
Момент зависит от потока и активной составляющей тока в роторе

В области Mmax начинает проявляться индуктивное сопротивление X2S.
Область скольжений S = Sкр ¸ 1
В этой области с увеличением скольжения S увеличивается индуктивное сопротивление ротора X2S = X2×S за счет которого увеличивается угол y2 между ЭДС  и током (см. рис. 117), активная составляющая при этом уменьшается, а следовательно уменьшается и момент, т.е. S X2S
и током (см. рис. 117), активная составляющая при этом уменьшается, а следовательно уменьшается и момент, т.е. S X2S 
 M¯
M¯
На рис.3 ток, при S = 1 равен пусковому, который в 5¸7 раз больше номинального. При S = 0 ток I1 ¹ 0, т.к. при S = 0 двигателем потребляется реактивная мощность для создания вращающего поля, кроме того, двигателем потребляется активная мощность на покрытие потерь в статоре.
При S = 0 ток ротора  , т.к.
, т.к. 
Кривая зависимости M = f(S) характеризуется тремя моментами:
а) Пусковой момент Мп при S = 1
б) Максимальный момент Мmax ® Sкр
в) Номинальный момент МН ® SН
Отношение максимального (критического) момента к номинальному, называется перегрузочной способностью
|
|
|
|
|
Дата добавления: 2014-11-20; Просмотров: 676; Нарушение авторских прав?; Мы поможем в написании вашей работы!