КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Приклад 1. 2 страница
|
|
|
|
Рис.5
Порядок виконання
Розглянемо на прикладі (рис 5.1, а).
1. Визначимо опорні реакції. Вертикальні реакції на опорах направимо угору, горизонтальна реакція на лівій опорі явно дорівнює нулю  Реакції
Реакції  та
та  рекомендується визначати так
рекомендується визначати так 
 одержимо
одержимо  .
. 
 одержимо
одержимо  . Перевірка:
. Перевірка: 

2. Будуємо епюри поперечних сил і згинальних моментів. На ділянці а балку перетинаємо на дві частини (рис. 5.1, а). Розглядаємо ліву частину, довжиною za (рис.5.1, б). Для неї записуємо вирази для поперечної сили та згинального моменту у будь якому перерізі ділянки а: 
 де
де  Надаємо значень
Надаємо значень  , вираховуємо величину Q(za) і
, вираховуємо величину Q(za) і  , будуємо епюри Q і М на ділянці а (рис 5.1, д, е). Слід мати на увазі, що
, будуємо епюри Q і М на ділянці а (рис 5.1, д, е). Слід мати на увазі, що  .
.
3. На рис 5.1, д ми бачимо, що у певній точці  тобто на епюрі повинен бути екстремум. Значення
тобто на епюрі повинен бути екстремум. Значення  знайдемо так:
знайдемо так:  звідки
звідки  Потім це значення у і знайдемо величину максимуму епюри на ділянці
Потім це значення у і знайдемо величину максимуму епюри на ділянці  . Для перерізу 2 (рис 5.1, в)
. Для перерізу 2 (рис 5.1, в) 
 . Провівши переріз 3 через ділянку с, розглянемо праву частину балки довжиною
. Провівши переріз 3 через ділянку с, розглянемо праву частину балки довжиною  (так простіше, ніж брати ліву частину, тобто майже всю балку). Для неї:
(так простіше, ніж брати ліву частину, тобто майже всю балку). Для неї: 
 . Побудувати епюри Q і М для всієї балки показані на рис 5.1, д, е.
. Побудувати епюри Q і М для всієї балки показані на рис 5.1, д, е.
4. Підбір перерізів. Умова міцності:  . Потрібна величина осьового моменту опору небезпечного перерізу, де діє максимальний згинальний момент
. Потрібна величина осьового моменту опору небезпечного перерізу, де діє максимальний згинальний момент  (рис 5.1, е),
(рис 5.1, е),  .
.
4.1. Приймаємо двотавр № 16 з Wx=109 см3 та площею перерізу Адв=20,2 см2
4.2. Круглий суцільний переріз:

площа 
3.3. Квадратний переріз:
 площа
площа 
Рис. 5.1
3.4. Прямокутний переріз:

Площа 
3.5. Круглий кільцевий переріз, якщо  :
:


площа 
4. Визначення раціонального перерізу. Так як вага 1 метру балки пропорційна площі поперечного перерізу, то найбільш раціональним перерізом буде той переріз, який має найменше значення за умов даної задачі. Отже, на першому місці слід поставити двотавр (Адв=20,2 см2), потім кільцевий переріз (Акіл=54,8см2) і т.д.
Завдання 6
Стальний вал трансмісії (рис. 6) робить n обертів за хвилину і передає потужність Р (кВт). Потрібно розрахувати вал на згин з крученням, визначити діаметр вала при допустимому напруженні  МПа.
МПа.
Дані взяти з таблиці 6
Таблиця 5. Дані до завдання 5.
| Параметри | Варіанти | |||||||||

| ||||||||||

| ||||||||||

| 1,4 | 0,8 | 1,1 | 1,0 | 0,9 | 0,8 | 0,6 | 0,7 | 0,6 | 0,5 |

| 1,0 | 1,1 | 1,2 | 1,1 | 0,8 | 0,8 | 0,7 | 0,8 | 0,5 | 0,7 |

| 0,8 | 1,0 | 0,7 | 0,6 | 0,6 | 0,6 | 0,6 | 0,9 | 0,6 | 0,7 |

| ||||||||||

| ||||||||||

| ||||||||||

|
Порядок розрахунку
Нехай для заданого на рис 6.1, а вала маємо: 



 ;
;  ;
; 
1. Визначається зовнішній скручуючий вал момент

2. Будується епюра крутних моментів:  у всіх перерізах вала, розташованих між шківами (рис 6.1, б)
у всіх перерізах вала, розташованих між шківами (рис 6.1, б)
Рис.6
Рис 6.1
3. Визначаються сили натягування гілок пасів (рис 6. схеми 1...6), або сила в зачепленні зубчастих коліс (рис.6 схеми 7...0):

У нашому випадку 
4. Визначаються сили тиску на вал з боку шківів: 
5. Будується діаграма сил (рис 6.1, в). Визначаються сили, які згинають вал у вертикальній  та горизонтальній
та горизонтальній  площинах. У нашому прикладі маємо:
площинах. У нашому прикладі маємо: 
6. Розпікається дія сил на вал у вертикальній площині (рис 6.1, г), будується епюра згинальних моментів відносно осі х-Мх (рис 6.1, д)
7. Розглядається дія сил на вал у горизонтальній площині (рис 6.1, е), будується епюра згинальних моментів Му (рис 6.1, є)
8. Будується сумарна епюра згинальних моментів за формулою
 (рис 6.1, ж)
(рис 6.1, ж)
9. Встановлюється небезпечний переріз. Очевидно, що при наявності сталого крутного моменту небезпечним буде той переріз, де буде мати місце максимальний згинальний момент. У нашому випадку це буде переріз де встановлений шків 
10. Використовуючи III або IV теорії міцності для небезпечного перерізу вираховуємо приведений момент:  , або
, або 
11. Із умови міцності визначаємо діаметр вала  де
де
 , або
, або  . По ГОСТ 6636-69 визначаємо стандартне значення діаметра вала.
. По ГОСТ 6636-69 визначаємо стандартне значення діаметра вала.
Завдання 7
Виконати структурний та кінематичний аналіз механізму
Схема береться за останньою цифрою шифру з рис.7, а дані до неї з табл.7
Таблиця 7. Дані до завдання 7.
| Параметри | Варіант | |||||||||

| 0,02 | 0,025 | 0,03 | 0,03 | 0,035 | 0,04 | 0,04 | 0,03 | 0,045 | 0,045 |

| 0,065 | 0,13 | 0,16 | 0,15 | 0,2 | 0,21 | 0,18 | 0,18 | 0,15 | 0,155 |

| 0,08 | 0,09 | 0,1 | 0,08 | 0,1 | 0,11 | 0,1 | 0,12 | 0,12 | 0,09 |

| 0,006 | 0,01 | 0,02 | 0,015 | 0,03 | 0,02 | 0,015 | 0,02 | 0,02 | 0,025 |

| 0,01 | 0,014 | 0,015 | 0,016 | 0,02 | 0,015 | 0,018 | 0,02 | 0,017 | 0,02 |

| 0,06 | 0,12 | 0,13 | 0,12 | 0,2 | 0,2 | 0,17 | 0,17 | 0,15 | 0,14 |

| ||||||||||

|
Порядок виконання завдання
1.Структурний аналіз механізму
1.1 Визначити степінь рухомості механізму за формулою Чебишева

де  - кількість рухомих ланок механізму;
- кількість рухомих ланок механізму;  - кількість кінематичних пар 5-го класу;
- кількість кінематичних пар 5-го класу;  - кількість кінематичних пар 4-го класу.
- кількість кінематичних пар 4-го класу.
1.2 Визначити клас механізму. Клас механізму визначається за найвищим класом групи Ассура, що входить до складу механізму. Тому заданий механізм слід розкласти на групи Ассура.
2.Кінематичний аналіз механізму
2.1 Накреслити кінематичну схему механізму у вибраному масштабі довжин  це спочатку у крайніх положеннях (тонкими лініями), а потім у положенні, яке матиме механізм, якщо кривошип повернеться на заданий кут
це спочатку у крайніх положеннях (тонкими лініями), а потім у положенні, яке матиме механізм, якщо кривошип повернеться на заданий кут  у напрямі
у напрямі  від одного з крайніх положень (зображується жирними лініями).
від одного з крайніх положень (зображується жирними лініями).
2.2 Побудувати план швидкостей для заданого кутом положення механізму у вибраному масштабі швидкостей.
2.3 Визначити величину та напрями швидкостей всіх заданих на кінематичній схемі механізму точок.
2.4 Визначити величину і напрям кутових швидкостей всіх ланок механізму
2.5 Побудувати план прискорень, задавшись масштабом прискорень
2.6 Визначити величину і напрям прискорень всіх точок механізму.
2.7 Визначити величину і напрям кутових прискорень всіх ланок механізму.
Таблиця 7. Данні до завдання 7
| Параметри | Варіант | |||||||||
|
| 0,02 | 0,025 | 0,03 | 0,035 | 0,04 | 0,045 | 0,04 | 0,03 | 0,045 | 0,045 |
|
| 0,065 | 0,13 | 0,16 | 0,15 | 0,2 | 0,21 | 0,18 | 0,18 | 0,15 | 0,155 |
|
| 0,08 | 0,09 | 0,1 | 0,08 | 0,1 | 0,11 | 0,1 | 0,12 | 0,12 | 0,09 |
|
| 0,006 | 0,01 | 0,02 | 0,015 | 0,03 | 0,02 | 0,015 | 0,02 | 0,02 | 0,025 |

| 0,01 | 0,014 | 0,015 | 0,016 | 0,02 | 0,015 | 0,018 | 0,02 | 0,017 | 0,02 |
|
| 0,06 | 0,12 | 0,13 | 0,12 | 0,2 | 0,2 | 0,17 | 0,17 | 0,15 | 0,14 |
|
| ||||||||||
|
|
Рис.7
Для шарнірного четирехзвенника виконати:
1) структурний аналіз;
2) кінематичний аналіз:
Для заданого положення механізму побудувати
а) план швидкостей
б) план прискорень
Дано:  ;
;  ;
;  ;
; 
Число обертів кривошипа 
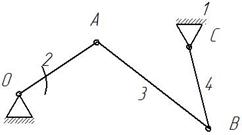
Виконуємо структурний аналіз плоского механізму - шарнірного четирехзвенника. Ведучою ланкою прийняти кривошип 2
1
Рис. 7.1
а) б)
1
Рис. 7.2
Для плоских механізмів використовуємо формулу Чебишева П.Л.
До складу механізму входять три рухливих ланки і чотири пари V класу: О (1,2), А (2,3), В (3,4) і С (4,1)
Ступінь рухливості дорівнює

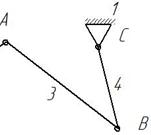
Отже, у механізмі має бути одна ведуча ланка (кривошип 2), яка разом із стояком 1 утворює механізм 1 класу (рис. 7,2, а). Ланки 3 і 4 (рис. 7,2, б) утворюють структурну групу ІІ класу, ІІ порядку, 1 виду. Це механізм ІІ класу, тому що найвищий клас структурної групи, яка входить до його складу, другий. Послідовність побудови механізму можна виразити формулою побудови
У цій формулі римськими цифрами позначений клас механізму (І) або клас групи (ІІ), а арабськими цифрами - номери рухомих ланок, які входять до їх складу.
2) Виконуємо кінематичний аналіз
Приймаються масштаб довжин  м/мм і визначаємо довжини ланок механізму:
м/мм і визначаємо довжини ланок механізму:  мм,
мм,  мм;
мм;  мм;
мм;  мм.
мм.
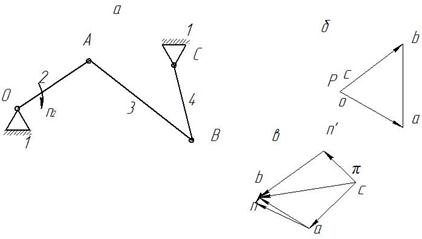
Рис. 7.3
Будуємо план швидкостей по векторним рівнянням


Кутова швидкість кривошипа 
Обираємо масштаб плану швидкостей, прийнявши довжину  , тобто план будуємо в масштабі кривошипа
, тобто план будуємо в масштабі кривошипа 
План швидкостей представлений на рис. 7.3б
Будуємо план прискорень (те ж в масштабі кривошипа, тобто  )
)
Прискорення точки 
Векторні рівняння, за якими будуємо план прискорень:




Відрізки на плані прискорень, відповідні прискоренням 
План швидкостей представлений на рис. 7.3 в
ДЛЯ КРИВОШИПНО-ПОВЗУННОГО МЕХАНІЗМУ ВИКОНАТИ:
1) структурний аналіз;
2) кінематичний аналіз:
а) побудувати план швидкостей для заданого положення механізму
б) побудувати план прискорень для заданого положення механізму
Дано:  ;
;  .
.
Кутова швидкість кривошипа АВ постійна і дорівнює  . Положення механізму визначається кутом
. Положення механізму визначається кутом 
1) Виконуємо структурний аналіз плоского кривошипно - повзунного механізму.
Для плоских механізмів використовуємо формулу Чебишева П.Л.
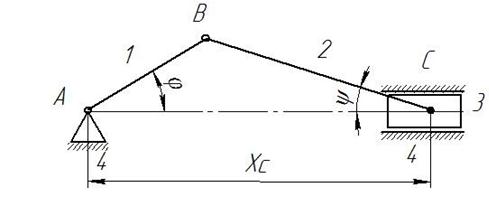
Рис. 7.3
У кривошипно - повзунному механізмі три рухливі ланки ( ): кривошип АВ, шатун АВ, повзун С.
): кривошип АВ, шатун АВ, повзун С.
Ці ланки утворюють чотири пари V класу, причому пари А (4,1), В (1,2), С (2,3) - обертові і С (3,4) - поступальні. Тоді ступінь рухливості механізму дорівнює 
Отже в цьому механізмі має бать одне провідне ланка.
Ведуча ланка і стояк, які утворюють пару V класу, називає механізмом І класу (рис.7.4, а)
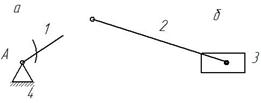
Рис. 7.4
Ланки 2 і 3 утворюють структурну групу ІІ класу, ІІ порядку, 2 види. В цілому це механізм ІІ класу, тому що найвищий клас структурної групи, яка входить до його складу, - другий
Послідовність побудови механізму можна виразити формулою
У цій формулі римськими цифрами позначений клас механізму (І) і клас групи (II), а арабськими цифрами - номери рухомих ланок, які входять до його складу.
2) Виконуємо кінематичний аналіз
Приймаємо масштаб креслення  м/мм та будуємо схему механізму (рис. 7.5,а).
м/мм та будуємо схему механізму (рис. 7.5,а).
Довжини відрізків на кресленні будуть:  мм,
мм,  мм.
мм.
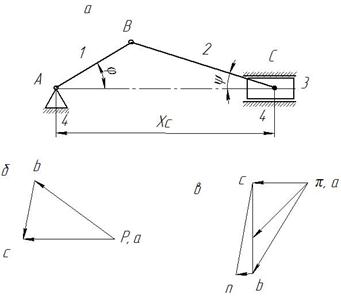
Рис. 7.5
Будуємо план швидкостей механізму в масштабі кривошипу, тоді його масштаб  Побудову виконуємо згідно формулам
Побудову виконуємо згідно формулам

На цьому плані відрізок  , що зображує швидкість
, що зображує швидкість  точки В, буде дорівнювати
точки В, буде дорівнювати  (рис.7.5,б)
(рис.7.5,б)
Будуємо план прискорень (те ж в масштабі кривошипа, тобто  )
)
Побудову виконуємо згідно з рівностями:

На цьому плані відрізок  , що зображує вектор нормального прискорення точки В, буде дорівнювати
, що зображує вектор нормального прискорення точки В, буде дорівнювати  . Відрізок
. Відрізок  , що зображує на плані нормальне прискорення
, що зображує на плані нормальне прискорення  точки С у обертальному русі ланки ВС відносно точки В, надається із рівності
точки С у обертальному русі ланки ВС відносно точки В, надається із рівності

Де  мм-відрізок, що зображує швидкість точки С в обертанні ланки ВС відносно точки В.
мм-відрізок, що зображує швидкість точки С в обертанні ланки ВС відносно точки В.
|
|
|
|
|
Дата добавления: 2014-12-08; Просмотров: 487; Нарушение авторских прав?; Мы поможем в написании вашей работы!