КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Общие теоремы динамики точки. Чисте суспільне благо – благо, що споживається колективно всіма людьми незалежно від того, платять вони за нього чи ні
|
|
|
|
Чисте суспільне благо – благо, що споживається колективно всіма людьми незалежно від того, платять вони за нього чи ні. Одержання корисності від забезпечення чистим суспільним благом єдиним споживачем неможливо.
Характеристика суспільних благ. Попит та пропозиція суспільних благ
Суспільні блага – блага, вигода від користування якими нероздільно розподілена серед усього суспільства незалежно від того, хочуть окремі його представники здобувати це благо чи ні.
Суспільні блага оплачуються за рахунок загального оподаткування, а не купуються окремими споживачами на ринку. Прикладом суспільного блага є система національної оборони, оскільки стосується всіх і кожного однаковою мірою. Крім суспільних благ, існують ще і суспільні "антиблага" – суспільні блага, що рівномірно накладають витрати на групу людей. Це небажані побічні продукти виробництва або споживання: парниковий ефект, за якого згорання корисних копалин загрожує глобальною зміною клімату; забруднення повітря, води і ґрунту відходами хімічної промисловості, виробництвом енергії або використанням автомобілів; кислотні дощі; радіоактивні викиди через випробування ядерної зброї; витікання озонового шару.
Розрізняють чисті суспільні блага і чисті приватні блага.
Чисте приватне благо – благо, яке можна розділити серед людей так, що іншим від цього не буде ніякої вигоди або витрат.
Якщо ефективне забезпечення суспільних благ часто вимагає державних дій, то приватні блага може ефективно розподілити ринок.
Отже, чисте приватне благо приносить корисність тільки покупцеві.
Цілий ряд благ не є ні чисто суспільними, ні чисто приватними. Наприклад, послуги правоохоронців, з одного боку, є суспільним благом, а з іншого, розкриваючи крадіжки зі зломом, вони роблять приватну послугу конкретній особі.
Чисті суспільні блага мають дві основні особливості:
1. Чисті суспільні блага мають властивість неконкурентності у споживанні. Це означає, що за даного обсягу блага його споживання одною людиною не знижує доступу для інших.
2. Споживання чистих суспільних благ не має винятків для окремих споживачів. Це означає, що споживачі, які не бажають платити за такі блага, не можуть бути позбавлені можливості їх отримувати. Чисте суспільне благо неможливо випускати "дрібними порціями", які можна було б розпродати через касовий апарат.
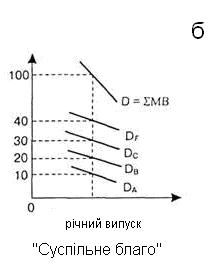
Крива попиту на чисте суспільне благо (Рис. 11.2.б) будується за допомогою додавання його індивідуальних граничних корисностей для всіх споживачів за кожної можливої ціни, що припускає підсумовування по вертикалі індивідуальних кривих попиту.
Крива попиту на чисте суспільне благо, як і крива попиту на чисте приватне благо, має спадний нахил. Однак крива попиту на чисте суспільне благо відрізняється від кривої попиту на чисте приватне благо двома моментами.
Перший – ціна не є змінною величиною на вертикальній вісі, оскільки не можна призначити ціну за окрему одиницю, тому що її споживання не є виключним правом. Другий – у разі чистого приватного блага люди корегують обсяг попиту таким чином, щоб пристосувати його до своїх смаків і свого економічного становища. Для чистого суспільного блага це неможливо, оскільки на одиницю цього блага не призначається ціна. Усі споживачі повинні споживати обсяг виробництва цілком. Отже, за будь-якого обсягу пропозиції обсяг споживання такого блага кожним споживачем повинен дорівнювати обсягові пропозиції.
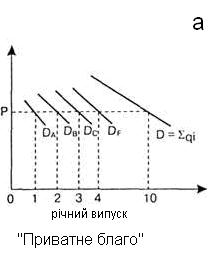
На рис. 11.2.а і 11.2.б показано відмінності між кривими попиту на суспільне і приватне благо.
|
|
|
|
|
|
Рис. 11.2. Відмінність кривих попиту на суспільне та приватне благо
Для чистого приватного блага сукупний обсяг попиту за кожної можливої ціни дорівнює сумі індивідуальних обсягів попиту:
QD = ∆qі,
де і = 1,..., N.
Крива попиту на чисте приватне благо утворюється за допомогою додавання обсягів попиту для кожної ціни уздовж горизонтальної вісі. Крива попиту на чисте суспільне благо утворюється за допомогою додавання граничних корисностей для кожного обсягу уздовж вертикальної осі. Кожний зі споживачів завжди споживає однакові обсяги блага.
Питання для самоперевірки: повтор з розділу 10
1. У чому полягає специфіка попиту на фактори виробництва?
2. Як визначається граничний дохід фактора виробництва?
3. Як визначаються граничні витрати фактора виробництва?
4. Як визначається ставка заробітної плати на конкурентному та неконкурентному ринках праці?
5. У чому полягає особливість пропозиції індивідуальної праці?
6. Дати характеристику ринку капіталу. Як визначається норма позичкового відсотка?
7. З якою метою застосовується дисконтування і за яким алгоритмом?
8. Чим відрізняється земельна рента від ціни землі?
9. Яка еластичність пропозиції землі?
Теорема об изменении количества движения матер. точки.  – количество движения материальной точки,
– количество движения материальной точки,  – элементарный импульс силы.
– элементарный импульс силы.  – элементарное изменение количества движения материальной точки равно элементарному импульсу силы, приложенной к этой точке (теорема в дифференц-ной форме) или
– элементарное изменение количества движения материальной точки равно элементарному импульсу силы, приложенной к этой точке (теорема в дифференц-ной форме) или  – производная по времени от количества движения материальной точки равна равнодействующей сил, приложенных к этой точке. Проинтегрируем:
– производная по времени от количества движения материальной точки равна равнодействующей сил, приложенных к этой точке. Проинтегрируем:  – изменение количества движения материальной точки за конечный промежуток времени равно элементарному импульсу силы, приложенной к этой точке, за тот же промежуток времени.
– изменение количества движения материальной точки за конечный промежуток времени равно элементарному импульсу силы, приложенной к этой точке, за тот же промежуток времени.  – импульс силы за промежуток времени [0,t]. В проекциях на оси координат:
– импульс силы за промежуток времени [0,t]. В проекциях на оси координат:  и т.д.
и т.д.
Теорема об изменении момента количества движения матер. точки.  - момент количества движения матер. точки относительно центра О.
- момент количества движения матер. точки относительно центра О.  – производная по времени от момента количества движения матер. точки относительно какого-либо центра равна моменту силы, приложенной к точке, относительно того же центра. Проектируя векторное равенство на оси координат. получаем три скалярных уравнения:
– производная по времени от момента количества движения матер. точки относительно какого-либо центра равна моменту силы, приложенной к точке, относительно того же центра. Проектируя векторное равенство на оси координат. получаем три скалярных уравнения:  и т.д. - производная от момента кол-ва движения матер. точки относительно какой-либо оси равна моменту силы, приложенной к точке, относительно той же оси. При действии центральной силы, проходящей через О, МО= 0, Þ =const.
и т.д. - производная от момента кол-ва движения матер. точки относительно какой-либо оси равна моменту силы, приложенной к точке, относительно той же оси. При действии центральной силы, проходящей через О, МО= 0, Þ =const.  =const, где
=const, где  – секторная скорость. Под действием центральной силы точка движется по плоской кривой с постоянной секторной скоростью, т.е. радиус-вектор точки описывает ("ометает") равные площади в любые равные промежутки времени (закон площадей) Этот закон имеет место при движении планет и спутников – один из законов Кеплера.
– секторная скорость. Под действием центральной силы точка движется по плоской кривой с постоянной секторной скоростью, т.е. радиус-вектор точки описывает ("ометает") равные площади в любые равные промежутки времени (закон площадей) Этот закон имеет место при движении планет и спутников – один из законов Кеплера.
Работа силы. Мощность. Элементарная работа dA = Ftds, Ft – проекция силы на касательную к траектории, направленная в сторону перемещения, или dA = Fdscosa.
Если a – острый, то dA>0, тупой – <0, a=90o: dA=0. dA=  – скалярное произведение вектора силы на вектор элементарного перемещения точки ее приложения; dA= Fxdx+Fydy+Fzdz – аналитическое выражение элементарной работы силы. Работа силы на любом конечном перемещении М0М1:
– скалярное произведение вектора силы на вектор элементарного перемещения точки ее приложения; dA= Fxdx+Fydy+Fzdz – аналитическое выражение элементарной работы силы. Работа силы на любом конечном перемещении М0М1:  . Если сила постоянна, то
. Если сила постоянна, то  = F×s×cosa. Единицы работы:[1 Дж (джоуль) = 1 Нм].
= F×s×cosa. Единицы работы:[1 Дж (джоуль) = 1 Нм].
 , т.к. dx=
, т.к. dx=  dt и т.д., то
dt и т.д., то  .
.
Теорема о работе силы: Работа равнодействующей силы равна алгебраической сумме работ составляющих сил на том же перемещении А=А1+А2+…+Аn.
Работа силы тяжести:  , >0, если начальная точка выше конечной.
, >0, если начальная точка выше конечной.
Работа силы упругости:  –работа силы упругости равна половине произведения коэффициента жесткости на разность квадратов начального и конечного удлинений (или сжатий) пружины.
–работа силы упругости равна половине произведения коэффициента жесткости на разность квадратов начального и конечного удлинений (или сжатий) пружины.
Работа силы трения: если сила трения const, то  - всегда отрицательна, Fтр=fN, f – коэфф.трения, N – нормальная реакция поверхности.
- всегда отрицательна, Fтр=fN, f – коэфф.трения, N – нормальная реакция поверхности.
Работа силы тяготения. Сила притяжения (тяготения):  , из mg=
, из mg=  , находим коэфф. k=gR2.
, находим коэфф. k=gR2.  – не зависит от траектории.
– не зависит от траектории.
Мощность – величина, определяющая работу в единицу времени,  . Если изменение работы происходит равномерно, то мощность постоянна: N=A/t. [1 Вт (ватт) =1 Дж/с, 1 кВт (киловатт) =
. Если изменение работы происходит равномерно, то мощность постоянна: N=A/t. [1 Вт (ватт) =1 Дж/с, 1 кВт (киловатт) =
= 1000 Вт, 1л.с.(лошадиная сила) = 75 кгс×м/с = 736 Вт].
Теорема об изменении кинетической энергии точки. В диффер-ной форме:  – полный дифференциал кинетической энергии мат.точки = элементарной работе всех действующих на точку сил.
– полный дифференциал кинетической энергии мат.точки = элементарной работе всех действующих на точку сил.  – кинетическая энергия матер.точки. В конечном виде:
– кинетическая энергия матер.точки. В конечном виде:  – изменение кинетической энергии мат.точки, при переходе ее из начального в конечное (текущее) положение равно сумме работ на этом перемещении всех сил, приложенных к точке.
– изменение кинетической энергии мат.точки, при переходе ее из начального в конечное (текущее) положение равно сумме работ на этом перемещении всех сил, приложенных к точке.
Силовое поле – область, в каждой точке которой на помещенную в ней матер.точку действует сила, однозначно определенная по величине и направлению в любой момент времени, т.е. должно быть известна  . Нестационарное силовое поле, если
. Нестационарное силовое поле, если  явно зависит от t, стационарное силовое поле, если сила не зависит от времени. Рассматриваются стационарные силовые поля, когда сила зависит только от положения точки:
явно зависит от t, стационарное силовое поле, если сила не зависит от времени. Рассматриваются стационарные силовые поля, когда сила зависит только от положения точки:  и Fx=Fx(x,y,z) и т.д. Свойства стационар. силовых полей:
и Fx=Fx(x,y,z) и т.д. Свойства стационар. силовых полей:
1) Работа сил стац. поля зависит в общем случае от начального М1 и конечного М2 положений и траектории, но не зависит от закона движения матер. точки.
2) Имеет место равенство А2,1= – А1,2. Для нестационарных полей эти свойства на выполняются.
Примеры: поле силы тяжести, электростатическое поле, поле силы упругости.
Стационарные силовые поля, работа сил которых не зависит от траектории (пути) движения матер. точки и определяется только ее начальным и конечным положениями называется потенциальными (консервативными).  , где I и II – любые пути, А1,2 – общее значение работы. В потенциальных силовых полях существует такая функция, однозначно зависящая от координат точек системы, через которую проекции силы на координатные оси в каждой точке поля выражаются так:
, где I и II – любые пути, А1,2 – общее значение работы. В потенциальных силовых полях существует такая функция, однозначно зависящая от координат точек системы, через которую проекции силы на координатные оси в каждой точке поля выражаются так:
 . Функция U=U(x1,y1,z1,x2,y2,z2,…xn,yn,zn) называется силовой функцией. Элементарная работа сил поля: dА=ådАi= dU. Если силовое поле является потенц-ным, элементарная работа сил в этом поле равна полному дифференциалу силовой функции. Работа сил на конечном перемещении
. Функция U=U(x1,y1,z1,x2,y2,z2,…xn,yn,zn) называется силовой функцией. Элементарная работа сил поля: dА=ådАi= dU. Если силовое поле является потенц-ным, элементарная работа сил в этом поле равна полному дифференциалу силовой функции. Работа сил на конечном перемещении  , т.е. работа сил в потенц-ном поле равна разности значений силовой функции в конечном и начальном положениях и не зависит о формы траектории. На замкнутом перемещении работа равна 0. Потенциальная энергия П равна сумме работ сил потенциального поля на перемещении системы из данного положения в нулевое. В нулевом положении П0= 0. П=П(x1,y1,z1,x2,y2,z2,…xn,yn,zn). Работа сил поля на перемещении системы из 1-го положения во 2-ое равна разности потенциальных энергий А1,2= П1– П2. Эквипотенциальные поверхности – поверхности равного потенциала. Сила направлена по нормали к эквипотенциальной поверхности. Потенциальная энергия системы отличается от силовой функции, взятой со знаком минус, на постоянную величину U0: А1,0= П =U0 – U. Потенциальная энергия поля силы тяжести: П= mgz. Потенц.энерг.поля центральных сил. Центральная сила – сила, которая в любой точке пространства направлена по прямой, проходящей через некоторую точку (центр), и модуль ее зависит только от расстояния r точки массой m до центра:
, т.е. работа сил в потенц-ном поле равна разности значений силовой функции в конечном и начальном положениях и не зависит о формы траектории. На замкнутом перемещении работа равна 0. Потенциальная энергия П равна сумме работ сил потенциального поля на перемещении системы из данного положения в нулевое. В нулевом положении П0= 0. П=П(x1,y1,z1,x2,y2,z2,…xn,yn,zn). Работа сил поля на перемещении системы из 1-го положения во 2-ое равна разности потенциальных энергий А1,2= П1– П2. Эквипотенциальные поверхности – поверхности равного потенциала. Сила направлена по нормали к эквипотенциальной поверхности. Потенциальная энергия системы отличается от силовой функции, взятой со знаком минус, на постоянную величину U0: А1,0= П =U0 – U. Потенциальная энергия поля силы тяжести: П= mgz. Потенц.энерг.поля центральных сил. Центральная сила – сила, которая в любой точке пространства направлена по прямой, проходящей через некоторую точку (центр), и модуль ее зависит только от расстояния r точки массой m до центра:  ,
,  . Центральной является гравитационная сила
. Центральной является гравитационная сила  ,
,
 , f = 6,67×10-11м3/(кгс2) – постоянная тяготения. Первая космическая скорость v1=
, f = 6,67×10-11м3/(кгс2) – постоянная тяготения. Первая космическая скорость v1=  » 7,9 км/с, R = 6,37×106м – радиус Земли; тело выходит на круговую орбиту. Вторая космическая скорость: v11=
» 7,9 км/с, R = 6,37×106м – радиус Земли; тело выходит на круговую орбиту. Вторая космическая скорость: v11=  » 11,2 км/с, траектория тела парабола, при v >v11– гипербола. Потенц. энергия восстанавливающей силы пружин:
» 11,2 км/с, траектория тела парабола, при v >v11– гипербола. Потенц. энергия восстанавливающей силы пружин:
 , l – модуль приращения длины пружины. Работа восстанавливающей силы пружины:
, l – модуль приращения длины пружины. Работа восстанавливающей силы пружины:  , l1 и l2 – деформации, соответствующие начальной и конечной точкам пути.
, l1 и l2 – деформации, соответствующие начальной и конечной точкам пути.
Динамика материальной системы
Материальная система – совокупность материальных точек, движение которых взаимосвязаны. Масса системы = сумме масс всех точек (или тел), образующих систему: М=åmk. Центр масс (центр инерции) – геометрическая точка, радиус-вектор  которой определяется равенством:
которой определяется равенством:  , где
, где  – радиусы-векторы точек, образующих систему. Координаты центра масс:
– радиусы-векторы точек, образующих систему. Координаты центра масс:  и т.д. Внешние силы Fe – силы, действующие на точки системы со стороны тел, не входящих в систему. Внутренние силы Fi – силы, вызванные взаимодействием точек, входящих в систему. Свойства внутренних сил: 1) Геометрическая сумма (главный вектор) всех внутренних сил = 0; 2) Геометрическая сумма моментов всех внутренних сил относительно произвольной точки = 0. Дифф-ные уравнения движения системы матер.точек:
и т.д. Внешние силы Fe – силы, действующие на точки системы со стороны тел, не входящих в систему. Внутренние силы Fi – силы, вызванные взаимодействием точек, входящих в систему. Свойства внутренних сил: 1) Геометрическая сумма (главный вектор) всех внутренних сил = 0; 2) Геометрическая сумма моментов всех внутренних сил относительно произвольной точки = 0. Дифф-ные уравнения движения системы матер.точек:
 или в проекциях на оси координат:
или в проекциях на оси координат:  и т.д. для каждой точки (тела) системы. Геометрия масс.
и т.д. для каждой точки (тела) системы. Геометрия масс.
Момент инерции матер.точки относительно некоторой оси называется произведение массы m этой точки на квадрат ее расстояния h до оси: mh2. Момент инерции тела (системы) относительно оси Оz: Jz= åmkhk2. При непрерывном распределении масс (тело) сумма переходит в интеграл: Jx= ò(y2+z2)dm; Jy= ò(z2+x2)dm; Jz= ò(x2+y2)dm – относительно координатных осей. Jz= M×r2, r – радиус инерции тела – расстояние от оси до точки в которой нужно сосредоточить всего тела, чтобы ее момент инерции равнялся моменту инерции тела. Момент инерции относительно оси (осевой момент инерции) всегда >0. Полярный момент инерции Jo= ò(x2+y2+z2)dm; Jx+Jy+Jz= 2Jo. Центробежный момент инерции Jxy для матер.точки называется произведение ее координат x и y на ее массу m. Для тела центробежными моментами инерции называются величины, определяемые равенствами: Jxy=òxy dm; Jyz=òyz dm; Jzx=òzx dm. Центробежные моменты инерции симметричны относительно своих индексов, т.е. Jxy=Jyx и т.д. В отличие от осевых, центробежные моменты инерции могут иметь любой знак и обращаться в нуль. Главной осью инерции тела называется ось, для которой оба центробежных момента инерции, содержащие индекс этой оси, равны нулю. Например, если Jxz=Jyz=0, то ось z – главная ось инерции. Главной центральной осью инерции называется главная ось инерции, проходящая через центр масс тела. 1)Если тело имеет плоскость симметрии, то любая ось, перпендикулярная к этой плоскости, будет главной осью инерции тела для точки, в которой ось пересекает плоскость. 2)Если тело имеет ось симметрии, то эта ось является главной осью инерции тела (ось динамической симметрии). Размерность всех моментов инерции [кгм2]
Центробежный момент инерции зависят не только от направления координатных осей, но и от выбора начала координат.
 Тензор инерции в данной точке:
Тензор инерции в данной точке: 
Моменты инерции некоторых однородных тел:
стержень массы m и длины L: 
 ;
;  .
.
Однородный сплошной диск с центром в точке С радиуса R и массы m:  . Полый цилиндр:
. Полый цилиндр:  ,
,
цилиндр с массой распределенной по ободу (обруч):  .
.
Теорема Гюйгенса-Штейнера момент инерции тела относительно произвольной оси равен моменту инерции относительно оси ей параллельной и проходящей через центр масс тела плюс произведение массы тела на квадрат расстояния между осями:


 . Наименьший момент инерции будет относительно той оси, которая проходит через центр масс. Момент инерции относительно произвольной оси L: J = Jxcos2a + Jycos2b + Jzcos2g – 2Jxycosacosb – 2Jyzcosbcosg – 2Jzxcosgcosa,
. Наименьший момент инерции будет относительно той оси, которая проходит через центр масс. Момент инерции относительно произвольной оси L: J = Jxcos2a + Jycos2b + Jzcos2g – 2Jxycosacosb – 2Jyzcosbcosg – 2Jzxcosgcosa,
если координатные оси являются главными относительно своего начала, то:
J = Jxcos2a + Jycos2b + Jzcos2g. Теорема о движении центра масс системы.
Произведение массы системы на ускорение ее центра масс равно геометрической сумме всех действующих на систему внешних сил  – дифференциальное уравнение движения центра масс. В проекциях на оси координат:
– дифференциальное уравнение движения центра масс. В проекциях на оси координат:  .
.
Закон сохранения движения центра масс. Если главный вектор (векторная сумма) внешних сил остается все время равным нулю, то центр масс механической системы находится в покое или движется прямолинейно и равномерно. Аналогично в проекциях на оси, если  Þ
Þ  , если при этом в начальный момент vCx0= 0, то Þ
, если при этом в начальный момент vCx0= 0, то Þ  Þ xC= const.
Þ xC= const.
Количество движения системы Q (иногда обозначают К) – вектор, равный геометрической сумме (главному вектору) количеств движения всех точек системы:
 , М – масса всей системы, vC – скорость центра масс.
, М – масса всей системы, vC – скорость центра масс.
Теорема об изменении количества движения системы:  – производная по времени от количества движения механической системы геометрически равна главному вектору внешних сил, действующих на эту систему. В проекциях:
– производная по времени от количества движения механической системы геометрически равна главному вектору внешних сил, действующих на эту систему. В проекциях:  , и т.д. Теорема об изменении кол-ва движения системы в интегральной форме:
, и т.д. Теорема об изменении кол-ва движения системы в интегральной форме:
 , где
, где  – импульсы внешних сил.
– импульсы внешних сил.
В проекциях: Q1x – Q0x = åSekx и т.д. количество движения системы за некоторый промежуток времени равно сумме импульсов действующих на систему внешних сил за тот же промежуток времени. Закон сохранения количества движения – если сумма всех внешних сил, действующих на систему, = 0, то вектор количества движения системы будет постоянен по модулю и направлению:  Þ
Þ  = const, аналогично в проекциях:
= const, аналогично в проекциях:  Þ Qx= const. Из закона следует, что внутренние силы изменить суммарное количество движение системы не могут. Тело переменной массы, масса которого непрерывно изменяется с течением времени m= f(t) (пр.: ракета, топливо которой убывает). Дифф-ное уравнение движения точки переменной массы:
Þ Qx= const. Из закона следует, что внутренние силы изменить суммарное количество движение системы не могут. Тело переменной массы, масса которого непрерывно изменяется с течением времени m= f(t) (пр.: ракета, топливо которой убывает). Дифф-ное уравнение движения точки переменной массы:
 – уравнение Мещерского, u – относительная скорость отделяющихся частиц.
– уравнение Мещерского, u – относительная скорость отделяющихся частиц.  – реактивная сила,
– реактивная сила,  — секундный расход топлива,
— секундный расход топлива,  . Реактивная сила направлена в противоположную сторону относительной скорости истечения топлива.
. Реактивная сила направлена в противоположную сторону относительной скорости истечения топлива.
Формула Циолковского:  — определяет скорость ракеты, когда все топливо будет израсходовано – скорость в конце активного участка, mт– масса топлива, mk– масса корпуса ракеты, v0 – начальная скорость.
— определяет скорость ракеты, когда все топливо будет израсходовано – скорость в конце активного участка, mт– масса топлива, mk– масса корпуса ракеты, v0 – начальная скорость.  – число Циолковского, m0 – стартовая масса ракеты. От режима работы ракетного двигателя, т.е. от того насколько быстро сжигается топливо, скорость ракеты в конце периода горения не зависит. Для достижения 1-ой космической скорости 7,9 км/с, при m0/mk= 4, скорость отброса должна быть 6 км/с, что трудно осуществить, поэтому применяются составные (многоступенчатые) ракеты.
– число Циолковского, m0 – стартовая масса ракеты. От режима работы ракетного двигателя, т.е. от того насколько быстро сжигается топливо, скорость ракеты в конце периода горения не зависит. Для достижения 1-ой космической скорости 7,9 км/с, при m0/mk= 4, скорость отброса должна быть 6 км/с, что трудно осуществить, поэтому применяются составные (многоступенчатые) ракеты.
Главный момент количеств движения матер. системы (кинетический момент)  – величина, равная геометрической сумме моментов количеств движения всех точек системы относительно центра О.
– величина, равная геометрической сумме моментов количеств движения всех точек системы относительно центра О.  . Теорема об изменении момента количеств движения системы (теорема об изменении кинетического момента):
. Теорема об изменении момента количеств движения системы (теорема об изменении кинетического момента):
 — производная по времени от кинетического момента механич. системы относительно некоторого неподвижного центра геометрически равна главному моменту внешних сил, действующих на эту систему относительно того же центра. Аналогичные равенства относительно осей координат:
— производная по времени от кинетического момента механич. системы относительно некоторого неподвижного центра геометрически равна главному моменту внешних сил, действующих на эту систему относительно того же центра. Аналогичные равенства относительно осей координат:  и т.д.
и т.д.
Закон сохранения кинетического момента: если  , то
, то  . Главный момент количеств движения системы является характеристикой вращательного движения. Кинетический момент вращающегося тела относительно оси вращения равен произведению момента инерции тела относительно этой оси на угловую скорость тела: Kz = Jzw. Если Mz= 0, то Jzw = const, Jz – момент инерции тела..
. Главный момент количеств движения системы является характеристикой вращательного движения. Кинетический момент вращающегося тела относительно оси вращения равен произведению момента инерции тела относительно этой оси на угловую скорость тела: Kz = Jzw. Если Mz= 0, то Jzw = const, Jz – момент инерции тела..
Кинетическая энергия системы – скалярная величина Т, равная арифметической сумме кинетической энергий всех точек системы:  . Если система состоит из нескольких тел, то Т = åТк. Поступательное движение: Тпост=
. Если система состоит из нескольких тел, то Т = åТк. Поступательное движение: Тпост=  ,. Вращательное движ-ие: Твр=
,. Вращательное движ-ие: Твр=  , Jz– момент инерции относительно оси вращения. Плоскопараллельное (плоское) движ-ие: Тпл=
, Jz– момент инерции относительно оси вращения. Плоскопараллельное (плоское) движ-ие: Тпл=  +
+  , vC – скорость центра масс. Общий случай: Т= +
, vC – скорость центра масс. Общий случай: Т= +  , JCP – момент инерции тела относительно мгновенной оси. Теорема Кенига: Т= +
, JCP – момент инерции тела относительно мгновенной оси. Теорема Кенига: Т= +  – кинетич. энергия мех. сист. = сумме кинетич. энергии центра масс системы, масса которого равна массе всей системы, и кинетич. энергии этой системы в ее относительном движении относительно центра масс. Работа силы: , работа момента:
– кинетич. энергия мех. сист. = сумме кинетич. энергии центра масс системы, масса которого равна массе всей системы, и кинетич. энергии этой системы в ее относительном движении относительно центра масс. Работа силы: , работа момента:  . Мощность: N= Fv, N=Mzw. Теорема об изменении кинетической энергии системы: в дифференциальной форме: dT =
. Мощность: N= Fv, N=Mzw. Теорема об изменении кинетической энергии системы: в дифференциальной форме: dT =  ,
,  ,
,  – элементарные работы, действующих на точку внешних и внутренних сил, в конечной форме:
– элементарные работы, действующих на точку внешних и внутренних сил, в конечной форме:
Т2 – Т1=  . Для неизменяемой системы
. Для неизменяемой системы  и Т2 – Т1=
и Т2 – Т1=  , т.е. изменение кинетической энергии твердого тела на некотором перемещении равно сумме работ внешних сил, действующих на тело на этом перемещении. Если сумма работ реакций связей на любом возможном перемещении системы равна нулю, то такие связи называются идеальными. Коэффициент полезного действия (кпд):
, т.е. изменение кинетической энергии твердого тела на некотором перемещении равно сумме работ внешних сил, действующих на тело на этом перемещении. Если сумма работ реакций связей на любом возможном перемещении системы равна нулю, то такие связи называются идеальными. Коэффициент полезного действия (кпд):  < 1, Апол.сопр. – работа полезных сил сопротивления (сил, для которых предназначена машина), Азатр= Апол.сопр.+ Авр.сопр. – затраченная работа, Авр.сопр.-– работа вредных сил сопротивления (силы трения, сопротивления воздуха и т.п.).
< 1, Апол.сопр. – работа полезных сил сопротивления (сил, для которых предназначена машина), Азатр= Апол.сопр.+ Авр.сопр. – затраченная работа, Авр.сопр.-– работа вредных сил сопротивления (силы трения, сопротивления воздуха и т.п.).
h= Nмаш/Nдв, Nмаш – полезная мощность машины, Nдв – мощность дв-ля, приводящего ее в движение. Закон сохранения полной механической энергии: Т + П = const. Если система движется под действием потенциальных сил, то сумма кинетической и потенциальной энергий сохраняет постоянное значение. (Т + П — интеграл энергии). Потенциальные силы – силы, работа которых не зависит от вида траектории, по которой перемещается точка (пр.: сила тяжести, сила упругости) Непотенциальные – напр.: силы трения. Механическая энергия – сумма кинетической и потенциальной энергий. Расход механической энергии обычно означает превращение ее в теплоту, электричество, звук или свет, а приток механической энергии связан с обратным процессом превращения различных видов энергии в механическую энергию.
Динамика твердого тела
Дифференциальные уравнения поступательного движения твердого тела:  и т.д.
и т.д.  – проекция внешней силы. Все точки тела движутся так же, как и его центр масс С. Для осуществления поступательного движения необходимо, чтобы главный момент всех внешних сил относительно центра масс был равен 0:
– проекция внешней силы. Все точки тела движутся так же, как и его центр масс С. Для осуществления поступательного движения необходимо, чтобы главный момент всех внешних сил относительно центра масс был равен 0:  =0.
=0.
Дифф-ные уравнения вращения твердого тела вокруг неподвижной оси:  ,
,
Jz – момент инерции тела относительно оси вращения z,  – момент внешних сил относительно оси вращения (вращающий момент).
– момент внешних сил относительно оси вращения (вращающий момент).  , e – угловое ускорение, чем больше момент инерции при данном , тем меньше ускорение, т.е момент инерции при вращательном движении является аналогом массы при поступательном. Зная , можно найти закон вращения тела j=f(t), и, наоборот, зная j=f(t), можно найти момент. Частные случаи: 1) если = 0, то w = const – тело вращается равномерно; 2) = const, то e = const – вращение равнопеременное. Уравнение аналогичное дифф-ному уравнению прямолинейного движения точки
, e – угловое ускорение, чем больше момент инерции при данном , тем меньше ускорение, т.е момент инерции при вращательном движении является аналогом массы при поступательном. Зная , можно найти закон вращения тела j=f(t), и, наоборот, зная j=f(t), можно найти момент. Частные случаи: 1) если = 0, то w = const – тело вращается равномерно; 2) = const, то e = const – вращение равнопеременное. Уравнение аналогичное дифф-ному уравнению прямолинейного движения точки  .
.
 Физический маятник – твердое тело, совершающее колебания вокруг неподвижной горизонтальной оси под действием силы тяжести. Ур-ние вращательного движения:
Физический маятник – твердое тело, совершающее колебания вокруг неподвижной горизонтальной оси под действием силы тяжести. Ур-ние вращательного движения:
 , обозначая
, обозначая  , получаем дифф-ное уравнение колебаний маятника:
, получаем дифф-ное уравнение колебаний маятника:  , k – частота колебаний маятника. Рассматривая малые колебания, можно считать sinj» j, тогда
, k – частота колебаний маятника. Рассматривая малые колебания, можно считать sinj» j, тогда  – дифф-ное уравнение гармонических колебаний. Решение этого уравнения: j = С1coskt + C2 sinkt или j = asin(kt + b), a – амплитуда колебаний маятника, b – начальная фаза колебаний. Период малых колебаний физического маятника Т= 2p/k = 2p
– дифф-ное уравнение гармонических колебаний. Решение этого уравнения: j = С1coskt + C2 sinkt или j = asin(kt + b), a – амплитуда колебаний маятника, b – начальная фаза колебаний. Период малых колебаний физического маятника Т= 2p/k = 2p  . Для малых колебаний маятника период не зависит от угла начального отклонения, этот результат является приближенным. Для математического маятника (материальной точки, подвешенной на нерастяжимой нити и движущейся под действием силы тяжести) имеем дифф. уравнения движения:
. Для малых колебаний маятника период не зависит от угла начального отклонения, этот результат является приближенным. Для математического маятника (материальной точки, подвешенной на нерастяжимой нити и движущейся под действием силы тяжести) имеем дифф. уравнения движения:
 , L – длина нити. Если L=
, L – длина нити. Если L=  , то математический маятник будет двигаться так же, как и физический (период колебаний совпадает). Величина L назыв-ся приведенной длиной физического маятника. Точка К, отстоящая от оси подвеса на расстоянии ОК=L, назыв-ся центром качаний физич. маятника. Если ось подвеса взять в точке К, то точка О будет центром качаний и наоборот – свойство взаимности. Расстояние ОК всегда >ОС, т.е. центр качаний всегда расположен ниже центра масс.
, то математический маятник будет двигаться так же, как и физический (период колебаний совпадает). Величина L назыв-ся приведенной длиной физического маятника. Точка К, отстоящая от оси подвеса на расстоянии ОК=L, назыв-ся центром качаний физич. маятника. Если ось подвеса взять в точке К, то точка О будет центром качаний и наоборот – свойство взаимности. Расстояние ОК всегда >ОС, т.е. центр качаний всегда расположен ниже центра масс.
Динамика плоского движения твердого тела
Положение тела определяется положением полюса и углом поворота тела вокруг полюса. Дифф-ные уравнения плоского движения тв. тела:
 ;
;  ;
;  , С – центр масс тела, JC – момент инерции тела относительно оси, перпендикулярной плоскости движения тела и проходящей через его центр масс.
, С – центр масс тела, JC – момент инерции тела относительно оси, перпендикулярной плоскости движения тела и проходящей через его центр масс.
Принцип Даламбера (метод кинетостатики)
В каждый момент движения сумма активных сил, реакций связей и сил инерции равна нулю  — п ринцип Даламбера для материальной точки.
— п ринцип Даламбера для материальной точки.
 – внешняя сила,
– внешняя сила,  – внутренняя сила. Сила инерции:
– внутренняя сила. Сила инерции:  , знак (–) показывает, что сила инерции направлена в противоположную сторону ускорению.
, знак (–) показывает, что сила инерции направлена в противоположную сторону ускорению.
Для системы добавляется уравнение моментов:  .
.
Обозначают:  – главный вектор сил инерции,
– главный вектор сил инерции,  – главный момент сил инерции. Учитывая, что геометрическая сумма внутренних сил и сумма их моментов равна нулю
– главный момент сил инерции. Учитывая, что геометрическая сумма внутренних сил и сумма их моментов равна нулю  ,
,  , получаем:
, получаем:  ,
,  — уравнения кинетостатики. Принцип Даламбера для системы – если в любой момент времени к каждой точке системы приложить, кроме реально действующих сил, соответствующие силы инерции, то полученная система сил будет находиться в равновесии и к ней можно применять уравнения статики. Это упрощает процесс решения задач.
— уравнения кинетостатики. Принцип Даламбера для системы – если в любой момент времени к каждой точке системы приложить, кроме реально действующих сил, соответствующие силы инерции, то полученная система сил будет находиться в равновесии и к ней можно применять уравнения статики. Это упрощает процесс решения задач.
Главный вектор сил инерции  равен произведению массы тела на ускорение его центра масс и направлен противоположно этому ускорению.
равен произведению массы тела на ускорение его центра масс и направлен противоположно этому ускорению.
Главный момент сил инерции зависит от вида движения: при поступательном движении  ; при плоском
; при плоском  , при вращении вокруг оси z, проходящей через центр масс тела,
, при вращении вокруг оси z, проходящей через центр масс тела,  .
.
 Определение реакций при вращении твердого тела вокруг неподвижной оси.
Определение реакций при вращении твердого тела вокруг неподвижной оси.
При вращении тела вокруг неподвижной оси возникают динамические давления на опоры. Их определение удобно решать методом кинетостатики. Прикладываем силы инерции для каждой точки: центробежная  , вращательная
, вращательная  , ri– расстояние от точки до оси вращения. Проектируя сумму этих сил на оси и учитывая, что
, ri– расстояние от точки до оси вращения. Проектируя сумму этих сил на оси и учитывая, что  и
и  , С – центр масс, получаем проекции главного вектора сил инерции:
, С – центр масс, получаем проекции главного вектора сил инерции:
 ,
,  .
.
Проекции главного момента сил инерции = сумме моментов центробежных и вращательных сил инерций относительно осей координат:
 ,
,
 ,
,
 ,
,
 ,
,  – центробежные моменты инерции,
– центробежные моменты инерции, 
Учитывая внешние силы, можно записать уравнения равновесия кинетостатики:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Последнее уравнение не содержит реакций опор и представляет собой дифференциальное уравнение вращения тела. Остальные пять уравнений позволяют определить пять неизвестных реакций. Динамические составляющие реакций определяются слагаемыми, которые зависят от сил инерции.
Условия отсутствия динамических составляющих:
 ,
,  ,
,  ,
,  , откуда
, откуда
xC= 0, yC= 0, Jyz= 0, Jzx= 0, это означает, что центр тяжести должен находиться на оси вращения тела и ось вращения тела z должна быть главной осью инерции тела. Т.е. ось вращения должна являться главной центральной осью инерции тела (ось, которая проходит через центр масс тела, и центробежные моменты инерции с индексом этой оси равны нулю). Для выполнения этого условия проводится специальная балансировка быстро вращающихся тел.
Основы аналитической механики
Возможные (виртуальные) перемещения системы (ds, dj) – любая совокупность бесконечно малых перемещений точек системы, допускаемых в данный момент наложенными на систему связями. Возможные перемещения рассматривают как величины первого порядка малости, пренебрегая при этом величинами высших порядков малости. Т.е. криволинейные перемещения точек заменяют прямолинейными отрезками, отложенными по касательным к их траекториям.
Число независимых между собою возможных перемещений системы называется числом степеней свободы этой системы. Например. шар на плоскости может перемещаться в любом направлении, но любое его возможное перемещение может быть получено как геометрическая сумма двух перемещений вдоль двух взаимно перпендикулярных осей. Свободное твердое тело имеет 6 степеней свободы.
Возможная (виртуальная) работа dА – элементарная работа, которую, действующая на матер.точку сила могла бы совершить на возможном перемещении этой точки.
Связи являются идеальными, если сумма элементарных работ реакций этих связей при любом возможном перемещении системы равна нулю, т.е. SdАr=0.
Принцип возможных перемещений: для равновесия механической системы с идеальными связями необходимо и достаточно, чтобы сумма элементарных работ всех действующих на нее активных сил при любом возможном перемещении была равна нулю.  или в проекциях:
или в проекциях:  .
.
Принцип возможных перемещений дает в общей форме условия равновесия для любой механической системы, дает общий метод решения задач статики.
Если система имеет несколько степеней свободы, то уравнение принципа возможных перемещений составляют для каждого из независимого перемещений в отдельности, т.е. будет столько уравнений, сколько система имеет степеней свободы.
Общее уравнение динамики  – при движении системы с идеальными связями в каждый данный момент времен сумма элементарных работ всех приложенных активных сил и всех сил инерции на любом возможном перемещении системы будет равна нулю. Уравнение использует принцип возможных перемещений и принцип Даламбера и позволяет составить дифференциальные уравнения движения любой механической системы. Дает общий метод решения задач динамики. Последовательность составления: а) к каждому телу прикладывают действующие на него задаваемые силы, а также условно прикладывают силы и моменты пар сил инерции; б) сообщают системе возможные перемещения; в) составляют уравнения принципа возможных перемещений, считая систему находящейся в равновесии.
– при движении системы с идеальными связями в каждый данный момент времен сумма элементарных работ всех приложенных активных сил и всех сил инерции на любом возможном перемещении системы будет равна нулю. Уравнение использует принцип возможных перемещений и принцип Даламбера и позволяет составить дифференциальные уравнения движения любой механической системы. Дает общий метод решения задач динамики. Последовательность составления: а) к каждому телу прикладывают действующие на него задаваемые силы, а также условно прикладывают силы и моменты пар сил инерции; б) сообщают системе возможные перемещения; в) составляют уравнения принципа возможных перемещений, считая систему находящейся в равновесии.
Уравнения Лагранжа 2-го рода:  , (i=1,2…s) – дифференциальные уравнения второго порядка, s – число степеней свободы системы (число независимых координат); qi – обобщенная координата (перемещение, угол, площадь и др.);
, (i=1,2…s) – дифференциальные уравнения второго порядка, s – число степеней свободы системы (число независимых координат); qi – обобщенная координата (перемещение, угол, площадь и др.);  – обобщенная скорость (линейная скорость, угловая, секторная и др.),
– обобщенная скорость (линейная скорость, угловая, секторная и др.),
Т = Т(q1,q2,…,qS,  ,
,  …
…  ,t) – кинетическая энергия системы, Qi – обобщенная сила (сила, момент и др.), ее размерность зависит от размерности обобщенной координаты и размерности работы.
,t) – кинетическая энергия системы, Qi – обобщенная сила (сила, момент и др.), ее размерность зависит от размерности обобщенной координаты и размерности работы.
Для вычисления обобщенной силы, например Q1, задаем возможное перемещение, при котором все вариации обобщенных координат, кроме dq1, равны нулю:
dq1¹0, dq2= dq3=…= dqS= 0. Вычисляем на этом перемещении возможную работу dА1 всех активных сил, приложенных к системе. Имея dА1= Q1dq1, находим  .
.
Если силы, действующие на систему, потенциальные (консервативные) (например, силы тяжести, силы упругости), то  , П = П(q1,q2,…,qS,t) – потенциальная энергия.
, П = П(q1,q2,…,qS,t) – потенциальная энергия.
Вводится функция Лагранжа: L = T – П, тогда  – уравнения Лагранжа второго рода для консервативной системы.
– уравнения Лагранжа второго рода для консервативной системы.
При стационарных связях (связях, не зависящих от времени) t не входит в выражение для кинетической энергии, тогда  – квадратичная форма обобщенных скоростей, aij= aji – коэффициенты инерции. Квадратичная форма всегда положительна.
– квадратичная форма обобщенных скоростей, aij= aji – коэффициенты инерции. Квадратичная форма всегда положительна.
 |  |
 |
 |
 |
|
|
|
|
Дата добавления: 2014-12-10; Просмотров: 425; Нарушение авторских прав?; Мы поможем в написании вашей работы!