КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Реализация корректирующих устройств в МПК
|
|
|
|
МПК на основе Siemens SAB167
Лекция 12
Вариант карты памяти для МПК на основе Siemens SAB167 представлен на рис.12.
В микроконтроллерах Siemens SAB C167 в начале адресного пространства всегда располагается ПЗУ (обычно размером 32K). Кроме этого старт микроконтроллера происходит с 0 вектора таблицы векторов, где должна быть расположена команда безусловного перехода (JMP метка_начала_блока_инициализвции) на начало блока инициализации МПК. Остальная часть таблица векторов прерываний также должна содержать команды безусловных переходов на соответствующие подпрограммы обработки прерываний. Следует отметить, что ОЗУ в SAB C167 может быть двух видов – внутреннее (в кристалле микроконтроллера) и внешнее (вне кристалла). Стек располагается во внутреннем ОЗУ, куда целесообразно поместить также область коэффициентов, переменных и флагов мехатронной системы, а область накопления данных – во внешнее ОЗУ. В остальном расположение и взаимодействие отдельных частей управляющей программы для SAB C167 и Intel 80x86 практически совпадают.
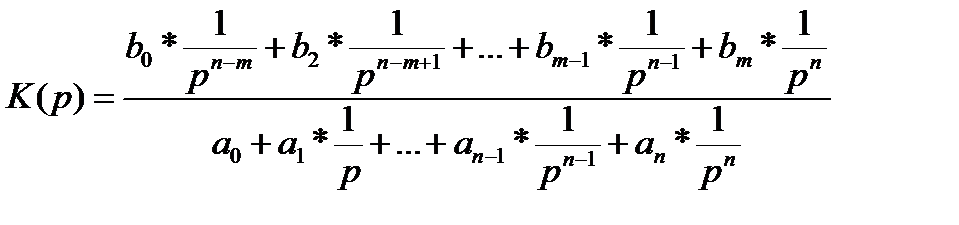
Исходной информацией для реализации корректирующего устройства в МПК является его передаточная функция по Лапласу, определенная на этапе синтеза системы. В общем случае передаточная функция может иметь вид
 , (1)
, (1)
где x, y – входная и выходная координаты корректирующего устройства. Очевидно, что реализация корректирующего устройства в МПК возможна только в виде программы, связывающей значения координат x и y в разные моменты квантования. Для написания такой программы необходимо иметь разностное уравнение относительно координат x и y. Эквивалентной формой разностного уравнения может быть передаточная функция корректирующего устройства в z-форме. Для ее получения перепишем (1) в следующем виде
|
|
|
 . (2)
. (2)
На основании анализа передаточной функции (2) можно представить структурное построение корректирующего устройства в виде соединения простейших аналоговых интеграторов  как на рис.13. Очевидно, что переход к цифровому корректирующему устройству возможен путем замены простейших аналоговых интеграторов на цифровые F(z), которые должны быть в некотором смысле эквивалентны аналоговым. Тогда передаточная функция корректирующего устройства в z-форме будет иметь вид
как на рис.13. Очевидно, что переход к цифровому корректирующему устройству возможен путем замены простейших аналоговых интеграторов на цифровые F(z), которые должны быть в некотором смысле эквивалентны аналоговым. Тогда передаточная функция корректирующего устройства в z-форме будет иметь вид
 . (3)
. (3)
Из передаточной функции (3) можно получить искомое разностное уравнение, имея в виду, что при переходе от z-формы к разностному уравнению оператор  означает запаздывание сигнала на k тактов квантования. Таким образом, получение программы реализации корректирующего устройства по его передаточной функции по Лапласу сводится к вопросу выбора цифрового интегратора F(z), эквивалентного в некотором смысле аналоговому интегратору
означает запаздывание сигнала на k тактов квантования. Таким образом, получение программы реализации корректирующего устройства по его передаточной функции по Лапласу сводится к вопросу выбора цифрового интегратора F(z), эквивалентного в некотором смысле аналоговому интегратору  .
.
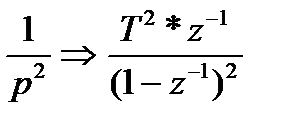
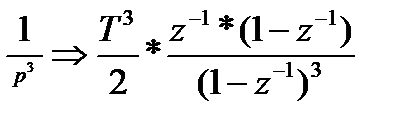
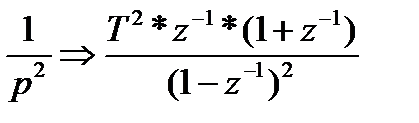
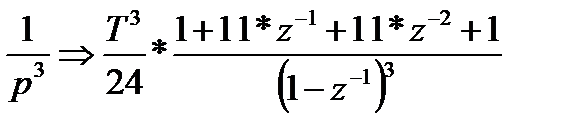
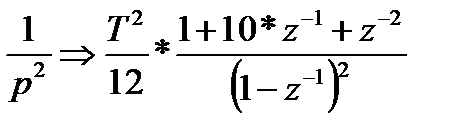
В таблице 12 представлен ряд формул для замены аналогового интегратора на цифровой интегратор, где T обозначает период квантования.
Таблица 12
| № | Наименование | Формула | Примечание |
Метод  преобразования преобразования
| 
| Соответствует  преобразованию от передаточной функции интегратора с формирующим элементом, равным периоду квантования T.
Обеспечивает инвариантность только импульсных характеристик интеграторов преобразованию от передаточной функции интегратора с формирующим элементом, равным периоду квантования T.
Обеспечивает инвариантность только импульсных характеристик интеграторов
| |
| Метод Цыпкина-Гольденберга | 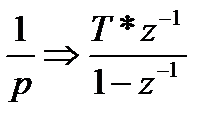
| Соответствует методу прямоугольников при численном интегрировании. Обеспечивает инвариантность только переходных характеристик интеграторов | |
| Метод Тастина | 
| Соответствует методу трапеций при численном интегрировании | |
| Метод Рагаццини-Бергена |
| ||
| Метод Боксера-Талера |
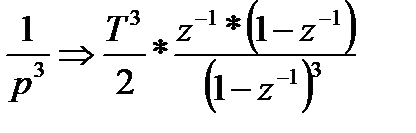
| Соответствует получению выражения интегратора из соотношения  путем разложения функции путем разложения функции  в ряд в ряд
| |
| Правило 1/3 Симпсона | 
| Соответствует методу численного интегрировании путем аппроксимации выходной координаты полиномом через 3 точки | |
| Правило 3/8 Симпсона | 
| Соответствует методу численного интегрировании путем аппроксимации выходной координаты полиномом через 4 точки |
|
|
|
Из методов, представленных в таблице 12, малопригодными для использования на практике следует признать методы 1 и 2, так как они не обеспечивают эквивалентности процессов аналогового и цифрового интегрирования при произвольном входном сигнале. Остальные методы 3 – 7 при использовании их в корректирующих устройствах мехатронной системы обеспечивают приемлемые результаты, а разница между ними состоит в фазовых сдвигах, которые имеют частотные характеристики реальных цифровых интеграторов по сравнению с идеальным интегратором. На практике наиболее удобен метод 3 (Тастина) в силу простоты формулы для любого порядка n интегратора.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 821; Нарушение авторских прав?; Мы поможем в написании вашей работы!