КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Правило свердлика для визначення напрямку вектора
|
|
|
|
магнітної індукції прямолінійного провідника зі струмом: 
якщо поступальний рух свердлика збігається з напрямком стуму, то обертання його ручки
показує напрям вектора магнітної індукції.
13. Правило правої руки для визначення напрямку вектора магнітної індукції прямолінійного провідника зі струмом: Якщо прямий провідник охопити чотирма пальцями правої руки так, щоб великий палець, розміщений вздовж провідника, вказував напрям струму, то напрям згину чотирьох пальців відповідатиме напрямку вектора магнітної індукції.
14. Розрахунок модуля вектора магнітної індукції прямолінійного провідника зі струмом силою  на відстані
на відстані  від провідника
від провідника


 - магнітна проникність середовища
- магнітна проникність середовища
 - магнітна стала.
- магнітна стала.
15.  Магнітне поле колового витка зі струмом: густина ліній магнітної індукції найбільша «всередині» витка, а за витком магнітного поля практично
Магнітне поле колового витка зі струмом: густина ліній магнітної індукції найбільша «всередині» витка, а за витком магнітного поля практично
не існує, оскільки магнітні поля двох протилежних ділянок
витка взаємно послаблюють одне одного.
16. Розрахунок модуля вектора магнітної індукції в центрі
колового витка радіусом по якому тече струм силою І
17. Соленоїд – довга пряма котушка з  однакових витків, що не лежать в одній прямій.
однакових витків, що не лежать в одній прямій.
18. Розрахунок модуля вектора магнітної індукції котушки зі струмом довжиною  і з кількістю витків по якій іде струм
і з кількістю витків по якій іде струм

19. 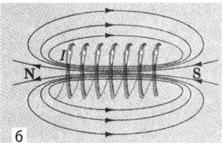 Магнітне поле котушки (соленоїда) зі струмом: густина ліній магнітної індукції найбільша «всередині» витка, а за витком магнітного поля практично не існує, оскільки магнітні поля двох протилежних ділянок витка взаємно послаблюють одне одного. Накладаючись, магнітні поля кожного з витків, взаємно підсилюють одне одного, тому всередині соленоїда відбувається значне підсилення магнітного поля, при цьому соленоїд можна розглядати як магніт полюси якого розташовані біля торців соленоїда.
Магнітне поле котушки (соленоїда) зі струмом: густина ліній магнітної індукції найбільша «всередині» витка, а за витком магнітного поля практично не існує, оскільки магнітні поля двох протилежних ділянок витка взаємно послаблюють одне одного. Накладаючись, магнітні поля кожного з витків, взаємно підсилюють одне одного, тому всередині соленоїда відбувається значне підсилення магнітного поля, при цьому соленоїд можна розглядати як магніт полюси якого розташовані біля торців соленоїда.
20. Правило свердлика для визначення напрямку вектора магнітної індукції поля колового витка зі струмом або котушки зі струмом: якщо обертання ручки свердлика показує напрям сили стуму у витку чи котушці, то поступальний рух свердлика збігається з напрямом вектора магнітної індукції.
21. Правило правої руки для визначення напрямку вектора магнітної індукції поля колового витка зі струмом або котушки зі струмом: Якщо коловий виток чи котушку зі струмом охопити чотирма пальцями правої руки так, щоб зігнуті чотири пальці вказували напрям струму в провіднику, тоді великий палець, розміщений вздовж осі витка чи котушки, вказуватиме напрямку вектора магнітної індукції.
22. Принцип суперпозиції магнітних полів: Вектор магнітної індукції поля створеного кількома струмами дорівнює векторній сумі магнітних індукцій полів створених кожним провідником окремо:
23. Електромагніт – являє собою котушку з феромагнітним осердям.
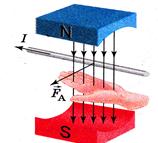
24. Сила Ампера  – сила, що діє з боку магнітного поля на провідник зі струмом.
– сила, що діє з боку магнітного поля на провідник зі струмом.

де  - модуль вектора магнітної індукції
- модуль вектора магнітної індукції
- сила струму в провіднику
- довжина провідника
 - кут між напрямом струму в провіднику
- кут між напрямом струму в провіднику  та індукцією мгнітного поля .
та індукцією мгнітного поля .
25. Правило лівої руки для визначення напряму сили Ампера: якщо розмістити ліву руку вздовж провідника так, щоб чотири пальці вказували напрям струму в ньому, а лінії магнітної індукції входили в долоню, то відігнутий великий палець покаже напрям сили Ампера.
26. Момент сил  , що діють на рамку зі струмом в магнітному полі.
, що діють на рамку зі струмом в магнітному полі.

де - кількість витків в рамці
- модуль вектора магнітної індукції,
- сила струму в провіднику,
 - площа рамки.
- площа рамки.
- кут між і нормаллю  (перпендикуляром) до поверхні рамки
(перпендикуляром) до поверхні рамки
Максимальний обертальний момент буде тоді, коли площина контуру буде паралельною до ліній магнітної індукції ( )
)


27. 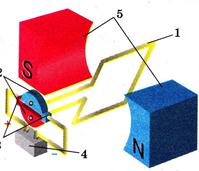 Електродвигун – це пристрій для перетворення електроенергії на механічну. В основі дії електродвигуна лежить обертальна дія сили Ампера на виток зі струмом.
Електродвигун – це пристрій для перетворення електроенергії на механічну. В основі дії електродвигуна лежить обертальна дія сили Ампера на виток зі струмом.
28. Принцип дії електродвигуна постійного струму: на рамку намотана обмотка 1, кінці якої приєднані до металевих півкілець 2, ізольованих одне від одного. До півкілець притиснуті пружні щітки 3, через які до рамки подається струм від джерела 4. Рамка розташована між полюсами магніту 5. Коли по рамці 1 іде струм, то на неї діє момент сил з боку магнітного поля і рамка починає обертатись. Для того, щоб рамка оберталась весь час в одному напрямку, після кожного півоберту кільця міняються місцями.
29. Сила Лоренца  – сила, що діє з боку магнітного поля на рухому заряджену частинку.
– сила, що діє з боку магнітного поля на рухому заряджену частинку.
 де
де  - заряд частинки
- заряд частинки
 - швидкість руху частинки
- швидкість руху частинки
- модуль вектора магнітної індукції
- кут між напрямом руху частинки  та індукцією
та індукцією
магнітного поля
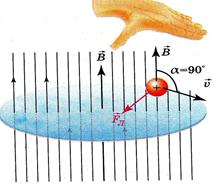
30. Правило лівої руки для визначення напряму сили Лоренца: якщо розмістити ліву руку так, щоб чотири пальці вказували напрям руху позитивно зарядженої частинки або були спрямовані проти напряму руху негативно зарядженої частинки, а лінії магнітної індукції входили в долоню, то відігнутий великий палець покаже напрям дії сили Лоренца.
31. Рух зарядженої частинки в магнітному полі:
a)  - частинка рухається вздовж ліній магнітної індукції: в даному випадку
- частинка рухається вздовж ліній магнітної індукції: в даному випадку  ,
,  , тобто
, тобто  , а це означає, що магнітне поле на заряджену частинку діяти не буде і вона рухатиметься рівномірно і прямолінійно за відсутності на неї впливу інших тіл.
, а це означає, що магнітне поле на заряджену частинку діяти не буде і вона рухатиметься рівномірно і прямолінійно за відсутності на неї впливу інших тіл.
b)  - частинка рухається перпендикулярно до ліній магнітної індукції: в даному випадку ,
- частинка рухається перпендикулярно до ліній магнітної індукції: в даному випадку ,  , тобто
, тобто  , а це означає, що магнітне поле діятиме на заряджену частинку з силою перпендикулярною до напрямку її руху,тому частинка, відповідно до другого закону Ньютона
, а це означає, що магнітне поле діятиме на заряджену частинку з силою перпендикулярною до напрямку її руху,тому частинка, відповідно до другого закону Ньютона  буде рухатись по колу радіусом :
буде рухатись по колу радіусом :
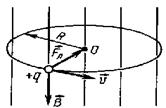

а період обертання частинки по колу рівний:
c) частинка рухається під кутом до ліній магнітної індукції ( )
)
то заряд рухатиметься по гвинтовій траєкторії навколо ліній магнітної індукції.
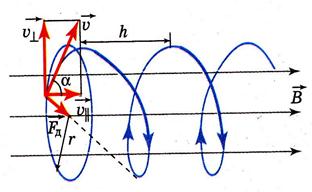 Вектор можна розкласти на складові
Вектор можна розкласти на складові  (вздовж ліній індукції, на яку не діє сила Лоренца, і яка відповідає за крок
(вздовж ліній індукції, на яку не діє сила Лоренца, і яка відповідає за крок  гвинтової лінії) та
гвинтової лінії) та  (перпендикулярну до ліній магнітної індукції і яка визначає радіус витка). Величина складових швидкості визначається як проекція швидкості частинки на відповідний напрямок. Як видно з малюнка
(перпендикулярну до ліній магнітної індукції і яка визначає радіус витка). Величина складових швидкості визначається як проекція швидкості частинки на відповідний напрямок. Як видно з малюнка


|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 17986; Нарушение авторских прав?; Мы поможем в написании вашей работы!