КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Адаптивное управление по заданной модели
|
|
|
|
Адаптивное управление
Большинство методов управления манипулятором робота предназначено для управления конечным звеном манипулятора или сочленениями. В них уделено внимание компенсации нелинейностей от сил взаимодействия между различными сочленениями. Эти управляющие алгоритмы могут быть неадекватными, потому что требуют наличия точной модели динамики манипулятора и не учитывают изменения нагрузки в процессе выполнения манипулятором работы. Такие изменения в объекте управления часто оказываются достаточно значительными и снижают эффективность управления по обратной связи. В результате ухудшается динамика и демпфирование системы, что ограничивает точность и скорость позиционирования конечного звена. Значительное улучшение точности формирования желаемой траектории во времени для широкого диапазона движений манипулятора и для различных нагрузок достигается при использовании адаптивных методов управления.
Наиболее легко реализуется адаптивное управление по заданной модели. Идея этого метода основана на выборе соответствующей заданной модели и алгоритма адаптации, по которым изменяются коэффициенты передач обратных связей на двигатели в реальной системе. Алгритм адаптации проводится на основе информации об ошибках между выходами заданной модели и выходами реальной системы. Общая блок-схема адаптивного управления системой по заданной модели приведена на рис. 18.2.
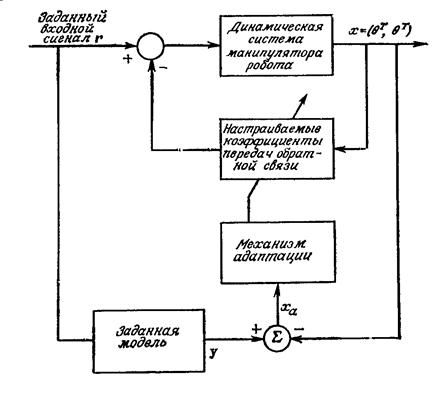
Рисунок 18.2.Общая блок-схема адаптивного управления системой
по заданной модели
В качестве заданной модели для каждой степени свободы манипулятора робота выбирается линейное дифференциальное уравнение второго порядка, не зависящее от времени. Манипулятор управляется путем настройки коэффициентов передачи обратной связи по положению и по скорости при отслеживании модели таким образом, чтобы его рабочие характеристики при замкнутом управлении совпадали с желаемыми рабочими характеристиками заданной модели. В результате такая схема адаптивного управления требует небольшого объема вычислений, которые могут выполняться с помощью недорогих микропроцессоров. Этот алгоритм адаптивного управления не требует ни сложных математических моделей динамической системы, ни предварительного знания внешних воздействий, таких, как величина нагрузки и др. Адаптивная схема, построенная по заданной модели, стабильно функционирует в широком диапазоне движений и нагрузок.
После определения вектора  , описывающего динамику заданной модели, и вектора
, описывающего динамику заданной модели, и вектора  , описывающего динамику манипулятора, i -е сочленение заданной модели может быть описана следующим образом:
, описывающего динамику манипулятора, i -е сочленение заданной модели может быть описана следующим образом:
 . (18-9)
. (18-9)
Коэффициенты  и
и  определяются из частоты собственных колебаний
определяются из частоты собственных колебаний  и коэффициента демпфирования
и коэффициента демпфирования  линейной системы второго порядка:
линейной системы второго порядка:
 и
и  . (18-10)
. (18-10)
Учитывая, что членами высоких порядков можно пренебречь, уравнение динамики манипулятора для i -го сочленения может быть записано в виде:
 , (18-11)
, (18-11)
где  и
и  - медленно изменяющиеся во времени параметры системы.
- медленно изменяющиеся во времени параметры системы.
Адаптивное управление с авторегрессивной моделью
Адаптивное самонастраивающееся устройство управления использует авторегрессивную модель для установления соответствия между входными и выходными параметрами манипулятора (рис. 18.3). Алгоритм управления предполагает, что силы взаимодействия между сочленениями ничтожно малы.
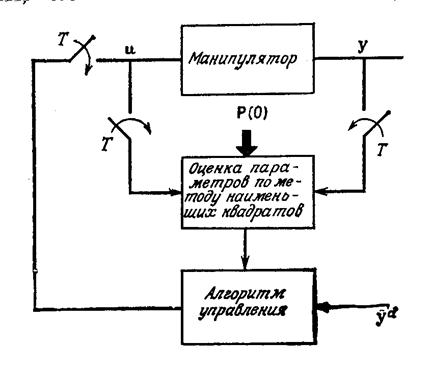
Рисунок 18.3. Адаптивное управление с авторегрессивной моделью
Обозначим входной момент на i -м сочленении через  , а выходное угловое положение манипулятора – через
, а выходное угловое положение манипулятора – через  . Пара входного выходного параметров
. Пара входного выходного параметров  может быть описана авторегрессивной моделью, которая приводит эту пару как можно в более близкое соответствие:
может быть описана авторегрессивной моделью, которая приводит эту пару как можно в более близкое соответствие:
 , (18-12)
, (18-12)
где  - постоянные силы;
- постоянные силы;  - ошибка моделирования (белый шум), не зависящая от
- ошибка моделирования (белый шум), не зависящая от  и
и  ,
,  . Параметры
. Параметры  и
и  определяются таким образом, чтобы получить лучшее совпадение наименьших квадратов измеренной пары параметров входа и выхода. Эти параметры могут быть получены путем минимизации следующего критерия:
определяются таким образом, чтобы получить лучшее совпадение наименьших квадратов измеренной пары параметров входа и выхода. Эти параметры могут быть получены путем минимизации следующего критерия:
 , (18-13)
, (18-13)
где N – число измерений; Е – вероятность выполнения процесса управления.
|
|
|
|
|
Дата добавления: 2014-12-17; Просмотров: 846; Нарушение авторских прав?; Мы поможем в написании вашей работы!