КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Плановая обоснованность развития макроэкономики 1 страница
|
|
|
|
Понятие об энергетическом стандарте обеспеченности средства платежа позволяет увидеть ещё один аспект уравнений межотраслевого баланса. Дело в том, что подавляющее большинство демографически обусловленных потребностей — это энергоемкие потребности в пище, одежде, жилище, транспорте, обогреве. Полезные затраты энергии в технологиях на выпечку хлеба, выплавку стали, скручивание нити, добычу и транспортировку сырья и стройматериалов и т.п. обусловлены в каждой технологии неизменно естественно-природными факторами.
С другой стороны, демографически обусловленные потребности ограничены. Человек может умереть от обжорства, как от одноразового, так и от систематического. Семья без прислуги не может поддерживать в порядке дворец и парк при нём, но там, где появляется «прислуга за всё», и, казалось бы, повышается эффективность профессиональной деятельности взрослых членов семьи на работе, там начинается развращение подрастающего поколения, в котором взращивается желание всю жизнь жить дармовщиной, трудом «прислуги за всё»: это — цепная реакция генерации паразитизма в новых поколениях.
Поэтому, если стандарты демографической обусловленности по пище ограничены физиологией человека, ведущего здоровый образ жизни, то по вещам они также ограничены размерами и обустройством дома, усадьбы и транспорта, которые семья, что в настоящем контексте означает несколько совместно живущих без тесноты [38] поколений родственников, может содержать в порядке своими силами при эпизодической помощи «службы быта» (сферы услуг), так или иначе, всегда существующей в обществе.
Сказанное означает, что долгосрочное планирование переходного процесса ликвидации недостачи продукции по демографически обусловленному спектру потребностей может вестись в форме, учитывающей рост энергопотенциала и разпределение энергопотребления по отраслям.
Можно ввести соотношения типа:
F P = [PБ ii]FК ; X P = [PБ ii]XК;
FК = [PБ ii-1]FP; XК = [PБ ii-1]XP,
здесь и далее, где это имеет значение, индекс «P» (от латинского «прейскурант») при векторах и матрицах указывает на стоимостную форму учёта; индекс «К» (от обрусевшего латинского «каталог») при векторах указывает на натуральную форму учёта (матрице A по умолчанию соответствует натуральная форма учёта); [PБ ii], [PБ ii-1] — диагональныематрицы: [PБ ii], составленная из элементов прейскуранта вектора P; элементы матрицы [PБ ii-1] образованыпо правилу:
PБ-111 = 1/PБ 1 , PБ-122 = 1/PБ 2 ,..., PБ-1nn = 1/PБ n.
На основе этих соотношений уравнения типа (6) могут быть представлены в виде:
[РБ ii](E - A) [РБ ii-1] XP = [PБ ii]FК либо после преобразования:
(E - A P) XP = FP (19),
где элементы матрицы A P =[aP ij] определяются соотношением:
aP ij =(РБ i / РБ j)aij.
Уравнение (19) представляет баланс продуктообмена в стоимостной форме учёта и описывает соотношение: «финансовые затраты на производство, за изключением явного выражения затрат, входящих в rЗСТ , — выход конечной продукции в стоимостной форме учёта»[39]. Оно имеет смысл при определённых прейскуранте РБ и матрице A. Если же оно в дополнение к этому связано с энергетическим стандартом обеспеченности средств платежа, то оно является одной из форм, описывающих разпределение энергопотребления по отраслям в процессе производства обществом спектров продукции ХК и FК на производственном цикле избранной длительности DT.
Но в такой интерпретации уравнение (19) — не математическое выражение “трудовой” или “техноэнергетической” теории стоимости, т.е. теории ценообразования: оно — только расчётная схема; действующий в обществе механизм ценообразования ею не описывается, а сам прейскурант РБ и энергетический стандарт обеспеченности средств платежа только придают ей определённость при переходе к натуральной форме учёта.
И эта определённость может быть положена в основу систематического долгосрочного планирования развития народного хозяйства, ликвидирующего нехватку потребления по демографически обусловленному спектру. Эта определённость при ориентации общественной системы производства на устойчиво прогнозируемый демографически обусловленный спектр потребностей позволяет преодолеть в системе планирования долгосрочную непредсказуемость технико-технологического прогресса.
В составе спектра FК конечной продукции есть группа «инвестиционных продуктов». Объёмы их производства для каждой из отраслей их потребителей в балансе продуктообмена отраслей предопределяют векторы валового выпуска ХК и конечной продукции FК последующего межотраслевого баланса, в состав вектора FК которого также входит своя группа “инвестиционных” продуктов.
Это означает, что, если прогноз изменения демографически обусловленных потребностей описан как вектор FD на длительную перспективу; если известны статистические характеристики возобновления ранее удовлетворенных потребностей по каталогу спектра FD, обусловленные 1) физиологией человека, 2) эргономичностью и 3) ресурсными характеристиками вещей, находящихся в пользовании людей, семей и общества в целом, то возможна постановка задачи о построении хронологически преемственной последовательности межотраслевых балансов, описываемых уравнениями типа (19), в результате выполнения которой за минимальное количество производственных циклов народное хозяйство выходит в режим устойчивого безусловного удовлетворения демографически обусловленных потребностей в преемственности поколений.
Математически эта задача эквивалентна задачам поражения в n -мерном пространстве медленно маневрирующей цели самонаводящимся или управляемым снарядом и выхода на цель и осуществления её ближнего сопровождения. Решение такого рода задач для плоскости и трехмерного пространства многократно заказывал ВПК в целях противовоздушной, противоракетной, противолодочной обороны. Кроме того: из решения такого рода математических задач на основе известных возможных параметров движения и маневрирования целей определялись необходимые скоростные и манёвренные параметры средств её поражения при их разработке.
Судьба пилотируемого Пауэрсом американского разведчика “У-2”, южно-корейского “Боинга-747”[40], сбитых СССР, и иранского аэробуса “А‑310”[41], говорит о том, что в военных интерпретациях такого рода алгоритмы вполне работоспособны. Это говорит о том, что математический аппарат и работоспособные алгоритмы, в принципе позволяющие решить поставленную задачу, где-то лежат в уже готовом виде и нуждаются в модификации их для пространства размерности «n» контрольных параметров многоотраслевой производственно-потребительской системы, а также в метрологически состоятельной макро- и микроэкономической интерпретации входящих в такого назначения алгоритмы параметров и переменных.
При адаптации алгоритмов к решению задач оптимизации самоуправления во многоотраслевых производственно-потребительских системах, необходимо учесть, что общество порождает одно обстоятельство, которое не довлеет, по крайней мере, над большинством военных приложений математики к задачам поражения движущейся цели. Военным всё равно, поразит ракета самолёт при заходе на цель с её носовой, хвостовой, нижней или верхней полусферы. Но обществу не всё равно, выйдет ли народное хозяйство сначала на демографически обусловленный уровень производства хлеба и жилья, либо же сначала в изобилии будут производиться зубочистки, правящая “элита” будет раз в год менять лимузины, но хлеба вдоволь хватит только каждому десятому, а семьи будут разрушаться из-за того, что негде жить, поскольку эти виды производства будут отложены на “потом”.
Формально математически это означает, что если в n -мерном пространстве есть две точки, а объект необходимо перевести из одной из них в другую, то даже, если существует некоторое множество равновозможных траекторий и время перевода объекта по любой из них — одно и то же, то эти траектории всё же управленчески не эквивалентны. Трехмерный случай, иллюстрирующий эту неэквивалентность, показан на рис. 5.
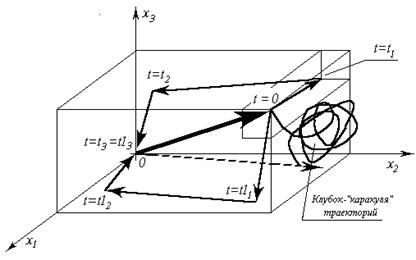 Рис. 5. Зависимость оптимальной траектории объекта от упорядоченности одного и того же набора контрольных параметров в векторе целей управления
Рис. 5. Зависимость оптимальной траектории объекта от упорядоченности одного и того же набора контрольных параметров в векторе целей управления
|
На рис. 5 «0 x1 x2 x3» — пространство параметров, каждый из которых является мерой одной из трех частных ошибок управления в составе трехмерного вектора ошибки управления. Иными словами, идеальному режиму управления соответствует начало координат. Радиус-вектор, идущий сплошной линией из начала координат, — вектор ошибки управления в момент времени t = 0. Траектории, определяемые последовательностью положений, изменяющихся с течением времени: «t = 0, t = t1 , t = t2 , t = t3» и «t = 0, t = t11 , t = t12 , t = t13 = t3»— ведут из одной и той же точки в пространстве параметров в одно и то же начало координат и переход по любой из них длится одинаковое время t3 . Выбор переходного режима (траектории) субъективно произволен, но первая траектория — оптимальна при упорядоченности вектора целей управления (x1 , x2 , x3 ), вторая — оптимальна при упорядоченности (x3 , x2 , x1). В реальном процессе упорядоченность параметров в векторе целей, воистину принятая в управление, выражается в порядке изчезновения частных ошибок управления (обнуления компонент вектора ошибки), вне зависимости от деклараций о благих намерениях управленцев. Именно в соответствии с этим принципом единства теории и практики управления ранее было высказано утверждение о первоприоритетности в векторе целей библейской цивилизации спектра деградационно-паразитических потребностей, подавляющего в управлении демографически обусловленные потребности.
Предположим, что на рис. 5: x1 — мера недостачи в обществе возможностей в получении образования подрастающим поколением; x2 — мера недостачи в питании, одежде, жилье, инфраструктурах; x3 — мера дефицита в роскоши и продукции деградационно-паразитического спектра потребностей. В силу действия неформализуемых взаимно изключающих обусловленностей параметров x1 и x3 при упорядоченности (x3 , x2 , x1), система вряд ли пройдет по соответствующей такой упорядоченности траектории далее половины пути. Скорее всего, вследствие действия не формализованных в модели факторов, она уклонится в иной ошибочный режим, показанный пунктирным радиус-вектором, идущим из начала координат, который возможно не будет устойчивым балансировочным режимом. Именно на этот путь ступили “демократизаторы” и хотят вести по нему народы региональной цивилизации России.
Тому, кто себе в лоб забил алкогольно-никотиновый кол, лично непотребно образование, новое знание, поскольку оно — в тягость наркотически угнетенному. А его потомство, вследствие вероятностно предопределённых генетических нарушений, как в биомассе организма, так и в искалеченной и подавленной в процессе воспитания психике, возможно не сможет освоить и те знания и культурные навыки, что были естественным достоянием предков. Это приведёт к падению культуры производства и уронит спектры производства и потребления.
“Саморегуляция” рынка без разделения демографически обусловленного и деградационных спектров будет выглядеть на рис. 5 по этим информационным причинно-следственным обусловленностям как хаотичное мельтешение ненулевого радиус-вектора в пространстве параметров, относительно какого-то среднестатистического положения, управляемого извне внесистемными факторами. “Саморегуляция” такого рода показана на рис. 5 как клубковидная “каракуля”.
Сказанное означает, что ограниченность трудовых ресурсов, квалификации, производственных мощностей в отраслях, энергопотенциала общества, после оценки нехватки в удовлетворении потребностей общества предопределяет как разделение демографически обусловленного и деградационно-паразитического спектров, так и формирование номенклатуры (каталога) демографически обусловленного спектра и упорядоченности её по приоритетности значимости ликвидации недостачи.
В процессе реального управления, в том числе и на стадии планирования, для разных этапов переходного процесса (рис. 5) понятию демографической обусловленности может соответствовать несколько разная номенклатура и её упорядоченность, определяющая демографически обусловленный вектор целей (контрольный спектр параметров). Эти различия должны находить своё отражение как в критерии оптимальности многошагового переходного процесса в целом, так и в критериях оптимальности каждого из шагов в планируемом переходном процессе.
Оптимизация каждого из множества производственных циклов DT вне объёмлющей задачи оптимизации по минимуму времени переходного процесса исчерпания недостаточности демографически обусловленного спектра потребления — изначально методологически несостоятельная задача, поскольку это — “оптимальный” шаг неизвестно куда. Но и оптимизация переходного макроэкономического процесса — лишь частная задача в процессе перехода к жизни общества в ладу с объёмлющей его биосферой.
Теперь разсмотрим метод динамического программирования, поскольку, хотя и было показано, что алгоритмы решения задачи об оптимальном наведении средств поражения на цель в нынешней цивилизации не могут не существовать, тем не менее, необходимо содержательно обсудить ещё некоторые “само собой” разумеющиеся очевидности, касающиеся оптимального выбора траекторий многопараметрических переходных процессов.
По отношению к макроэкономической системе её “скоростные” параметры, прежде всего, определяются энергопотенциалом. Поэтому в макроэкономических интерпретациях задача «наведения оружия на цель» предстает как задача о темпах роста энергопотенциала и его разпределении: 1) на производство демографически обусловленного спектра потребностей и 2) на развитие и поддержание производственной базы всех отраслей.
Математически такое решение может быть получено, в частности, на основе алгоритмов, реализующих метод динамического программирования (он может изпользоваться и для решения задач линейного программирования). Обстоятельное его изложение и конкретные алгоритмические модели решения тех или иных прикладных задач можно найти в специальной литературе. Здесь же мы опишем его структуру и затронем некоторые с ним связанные мировоззренческие вопросы.
Алгоритм метода динамического программирования осуществляет формализованный выбор оптимальной в некотором смысле траектории в n -мерном пространстве. Термин «динамическое программирование», также как и термин «линейное программирование», о котором речь шла ранее, — прижившиеся в Русском языке подстрочники, мало что говорящие о существе самих методов выбора математически формализованных наилучших вариантов решения практических задач управления, планирования, проектирования.
Аппарат динамического программирования позволяет решать задачи многопараметрической оптимизации в тех случаях, когда в силу разного рода объективно-математических причин (дискретность ограничений, нелинейности математической модели, нарушение свойства выпуклости и т.п.) стандартные алгоритмы решения задач линейного программирования неработоспособны.
Вполне понятно, что метод динамического программирования, как и прочие математические методы оптимизации, не изучался и не изучается в большинстве вузовских курсов СССР и России на специальностях, в которых владение им придаёт квалификации специалистов КАЧЕСТВЕННО более высокий уровень. Тем более в литературе не обсуждаются и философско-мировоззренческие аспекты нашедшие в нём своё алгоритмическое выражение.
В изложении существа метода динамического программирования мы опираемся на книгу “Курс теории автоматического управления” (Палю де Ла Барьер: французское издание 1966 г., русское издание — “Машиностроение”, 1973 г.), хотя и не повторяем его изложения. Отдельные положения взяты из ранее упоминавшегося курса “Изследование операций” Ю.П.Зайченко (Киев, “Вища школа”, 1979)[42].
* * *
Метод динамического программирования работоспособен, если формальная интерпретация реальной задачи позволяет выполнить следующие условия:
1. Разсматриваемая задача может быть представлена как N ‑шаговый процесс, описываемый соотношением:
Xn + 1 = f(Xn , Un, n), где n — номер одного из множества возможных состояний системы, в которое она переходит по завершении n -ного шага; Xn — вектор состояния системы, принадлежащий упомянутому n -ному множеству; Un — управление, выработанное на шаге n (шаговое управление), переводящее систему из возможного её состояния в n -ном множестве в одно из состояний (n + 1)‑го множества. Чтобы это представить наглядно, следует обратиться к рис. 6, 7, 8, о которых речь пойдет далее.
2. Структура задачи не должна изменяться при изменении расчётного количества шагов N.
3. Размерность пространства параметров, которыми описывается состояние системы, не должна изменяться в зависимости от количества шагов N.
4. Выбор управления на любом из шагов не должен отрицать выбора управления на предыдущих шагах. Иными словами оптимальный выбор управления в любом из возможных состояний должен определяться параметрами разсматриваемого состояния, а не параметрами процесса, в ходе которого система пришла в разсматриваемое состояние.
Чисто формально, если одному состоянию соответствуют разные предистории его возникновения, влияющие на последующий выбор оптимального управления, то метод позволяет включить описания предисторий в вектор состояния, что ведёт к увеличению размерности вектора состояния системы. После этой операции, то, что до неё описывалось как одно состояние, становится множеством состояний, отличающихся одно от других компонентами вектора состояния, описывающими предисторию процесса.
5. Критерий оптимального выбора последовательности шаговых управлений Un и соответствующей траектории в пространстве формальных параметров имеет вид:
V = V0 (X0, U0) + V1 (X1, U1) +...+ VN - 1 (XN- 1, UN - 1) + VN (XN).
Критерий V принято называть полным выигрышем, а входящие в него слагаемые — шаговыми выигрышами. В задаче требуется найти последовательность шаговых управлений Un и траекторию, которым соответствует максимальный из возможных полных выигрышей. По своему существу полный “выигрыш” V — мера качества управления процессом в целом. Шаговые выигрыши, хотя и входят в меру качества управления процессом в целом, но в общем случае не являются мерами качества управления на соответствующих им шагах, поскольку метод предназначен для оптимизации управления процессом в целом, а эффектные шаговые управления с большим шаговым выигрышем, но лежащее вне оптимальной траектории интереса не представляют. Структура метода не запрещает при необходимости на каждом шаге употреблять критерий определения шагового выигрыша Vn, отличный от критериев, принятых на других шагах.
С индексом n — указателем-определителем множеств возможных векторов состояния — в реальных задачах может быть связан некий изменяющийся параметр, например: время, пройденный путь, уровень мощности, мера расходования некоего ресурса и т.п. То есть метод применим не только для оптимизации управления процессами, длящимися во времени, но и к задачам оптимизации многовариантного одномоментного или нечувствительного ко времени решения, если такого рода “безвременные”, “непроцессные” задачи допускают их многошаговую интерпретацию.
Теперь обратимся к рис. 6 — рис. 8, повторяющим взаимно связанные рис. 40, 41, 42 из курса теории автоматического управления П. де Ла Барьера.
На рис. 6 показаны начальное состояние системы «0» и множества её возможных последующих состояний «1», «2», «3», а также возможные переходы из каждого возможного состояния в другие возможные состояния.
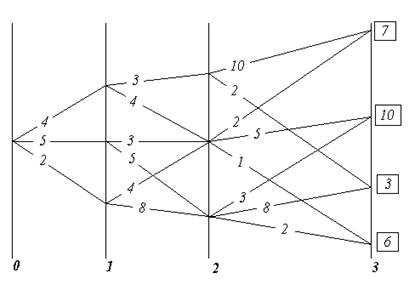 Рис. 6. К существу метода динамического программирования
Рис. 6. К существу метода динамического программирования
|
И всё это вместе похоже на карту настольной детской игры, по которой перемещаются фишки: каждому переходу-шагу соответствует свой шаговый выигрыш, а в завершающем процесс третьем множестве — каждому из состояний системы придана его оценка, помещенная в прямоугольнике. Принципиальное отличие от игры в том, что гадание о выборе пути, употребляемое в детской игре, на основе бросания костей или вращения волчка и т.п., в реальном управлении недопустимо, поскольку это — передача целесообразного управления тем силам, которые способны управлять выпадением костей, вращением волчка и т.п.
Если выбирать оптимальное управление на первом шаге, то необходимо предвидеть все его последствия на последующих шагах. Поэтому описание алгоритма метода динамического программирования часто начинают с описания выбора управления на последнем шаге, ведущем в одно из завершающих процесс состояний. При этом ссылаются на «педагогическую практику», которая свидетельствует, что аргументация при описании алгоритма от завершающего состояния к начальному состоянию легче возпринимается, поскольку опирается на как бы уже сложившиеся к началу разсматриваемого шага условия, в то время как возможные завершения процесса также определены.
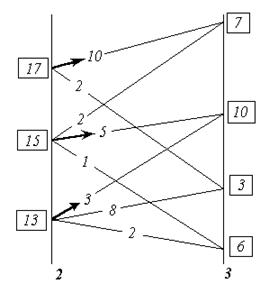 Рис. 7. К существу метода динамического программирования
Рис. 7. К существу метода динамического программирования
|
В соответствии с этим на рис. 7 анализируются возможные переходы в завершающее множество состояний «3» из каждого возможного состояния в ему предшествующем множестве состояний «2», будто бы весь предшествующий путь уже пройден и осталось последним выбором оптимального шагового управления завершить весь процесс. При этом для каждого из состояний в множестве «2» определяются все полные выигрыши как сумма = «оценка перехода» + «оценка завершающего состояния». Во множестве «2» из полученных для каждого из состояний, в нём возможных полных выигрышей, определяется и запоминается максимальный полный выигрыш и соответствующий ему переход (фрагмент траектории). Максимальный полный выигрыш для каждого из состояний во множестве «2» взят в прямоугольную рамку, а соответствующий ему переход отмечен стрелкой. Таких оптимальных переходов из одного состояния в другие, которым соответствует одно и то же значение полного выигрыша, в принципе может оказаться и несколько. В этом случае все они в методе неразличимы и эквивалентны один другому в смысле построенного критерия оптимальности выбора траектории в пространстве параметров, которыми описывается система.
После этого множество «2», предшествовавшее завершающему процесс множеству «3», можно разсматривать в качестве завершающего, поскольку известны оценки каждого из его возможных состояний (максимальные полные выигрыши) и дальнейшая оптимизация последовательности шаговых управлений и выбор оптимальной траектории могут быть проведены только на ещё не разсмотренных множествах, предшествующих множеству «2» в оптимизируемом процессе (т.е. на множествах «0» и «1»).
Таким образом, процедура, иллюстрируемая рис. 7, работоспособна на каждом алгоритмическом шаге метода при переходах из n -го в (n - 1) -е множество, начиная с завершающего N ‑ного множества до начального состояния системы.
В результате последовательного попарного перебора множеств, при прохождении всего их набора, определяется оптимальная последовательность преемственных шаговых управлений, максимально возможный полный выигрыш и соответствующая им траектория. На рис. 8 утолщённой линией показана оптимальная траектория для разсматривавшегося примера.
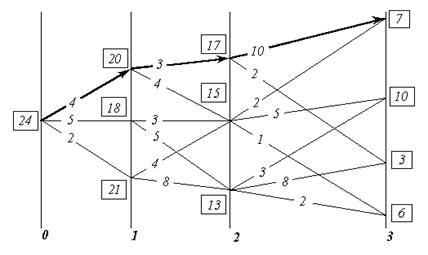 Рис. 8. К существу метода динамического программирования.
Рис. 8. К существу метода динамического программирования.
|
В разсмотренном примере критерий оптимальности — сумма шаговых выигрышей. Но критерий оптимальности может быть построен и как произведение обязательно неотрицательных сомножителей.
Поскольку результат (сумма или произведение) не изменяется при изменении порядка операций со слагаемыми или сомножителями, то алгоритм работоспособен и при переборе множеств возможных состояний в порядке, обратном разсмотренному: т.е. от исходного к завершающему множеству возможных состояний.
Если множества возможных состояний упорядочены в хронологической последовательности, то это означает, что расчётная схема может быть построена как из реального настоящего в прогнозируемое определённое будущее, так и из прогнозируемого определённого будущего в реальное настоящее. Это обстоятельство говорит о двух неформальных соотношениях реальной жизни, лежащих вне алгоритма:
1). Метод динамического программирования формально нечувствителен к характеру причинно-следственных обусловленностей (в частности, он не различает причин и следствий). По этой причине каждая конкретная интерпретация метода в прикладных задачах должна строиться с неформальным учётом реальных причинно следственных обусловленностей;
2). Если прогностика в согласии с иерархически высшим объёмлющим управлением, а частное вложенное в объёмлющее управление осуществляется квалифицировано, в силу чего процесс частного управления протекает в ладу с иерархически высшим объёмлющим управлением, то НЕ СУЩЕСТВУЕТ УПРАВЛЕНЧЕСКИ ЗНАЧИМОЙ РАЗНИЦЫ МЕЖДУ РЕАЛЬНЫМ НАСТОЯЩИМ И ИЗБРАННЫМ БУДУЩИМ. Процесс целостен, по какой причине ещё не свершившееся, но уже нравственно избранное и объективно не запрещенное Свыше будущее, в свершившемся настоящем защищает тех, кто его творит на всех уровнях: начиная от защиты психики от наваждений до защиты от целенаправленной “физической” агрессии. То есть, если матрица возможных состояний (она же матрица возможных переходов) избрана в ладу с иерархически высшим объёмлющим управлением, то она сама — защита и оружие, средство управления, на которое замкнуты все шесть приоритетов средств обобщенного оружия и управления.
Объективное существование матриц возможных состояний и переходов проявляется в том, что в слепоте можно “забрести” в некие матрицы перехода и прочувствовать на себе их объективные свойства. Последнее оценивается субъективно, в зависимости от отношения к этим свойствам, как полоса редкостного везения либо как нудное “возвращение на круги своя” или полоса жестокого невезения.
Но для пользования методом динамического программирования и сопутствующими его освоению неформализованными в алгоритме жизненными проявлениями матриц перехода, необходимо СОБЛЮДЕНИЕ ГЛАВНОГО из условий:
В задачах оптимизации процессов управления метод динамического программирования <реального будущего: — по умолчанию> работоспособен только, если определён вектор целей управления, т.е. должно быть избрано завершающее процесс конкретное состояние.
В реальности это завершающее конкретное состояние должно быть заведомо устойчивым и приемлемым процессом, объёмлющим и несущим оптимизируемый методом частный процесс. Но выбор и определение конкретных характеристик процесса, в который должна войти управляемая система по завершении алгоритма метода — лежит вне его самого в области “мистики” или в области методов, развитых в не математических по своему существу науках.
«Каково бы ни было состояние системы перед очередным шагом, надо выбирать управление на этом шаге так, чтобы выигрыш на данном шаге плюс оптимальный выигрыш на всех последующих шагах был максимальным» (Е.С.Вентцель, “Изследование операций. Задачи, принципы, методология.”, М., “Наука”, 1988 г., стр. 109).
Неспособность определить вектор целей управления (достижением которого должен завершиться оптимизируемый в методе процесс) и/либо выявить исходное состояние объекта управления не позволяет последовать этой рекомендации, что объективно закрывает возможности к изпользованию метода динамического программирования, поскольку начало и конец процесса должны быть определены в пространстве параметров, на которых построена математическая (или иная) модель метода. Причем определённость завершения оптимизируемого процесса имеет управленчески большее значение, чем ошибки и некоторые неопределённости в идентификации (выявлении) начального состояния объекта управления.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 333; Нарушение авторских прав?; Мы поможем в написании вашей работы!