КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Введение в теорию автоматического регулирования и управления
|
|
|
|
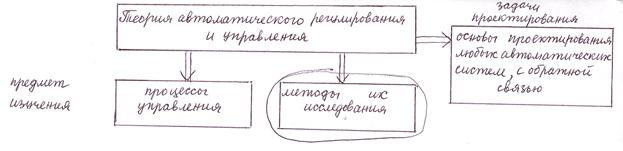
Теория А.У.и Р. - наука, которая изучает процессы управления, методы исследования, а также основы проектирования автоматических систем, работающих по замкнутому циклу, в любой области техники. Иначе говоря, она изучает процессы управления и задачи создания любых систем с обратной связью.
Термин «управление» является более общим, чем «регулирование», что будет видно из дальнейшего.
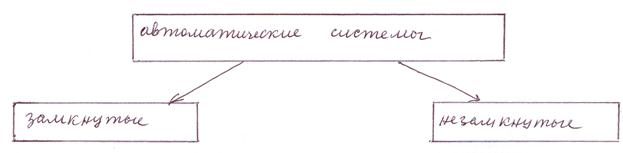
Вначале более подробно рассмотрим понятие автоматической системы. Все автоматические системы можно разделить на:
1) автоматы, выполняющие различные одноразовые и многоразовые операции (билетный автомат, автомат переключения скоростей, различные станки-автоматы);
2) автоматические системы, которые в течение достаточно длительного времени нужным образом изменяют (или поддерживают неизменными) какие-либо физические величины в том или ином управляемом процессе. Сюда относятся: автопилоты, следящие системы, системы дистанционного управления, некоторые вычислительные устройства, автоматические регуляторы.
Автоматическими системами второго класса в основном занимается теория автоматического регулирования и управления.
Эти системы, в свою очередь, делятся на незамкнутые и замкнутые.
Общая структурная схема незамкнутой системы выглядит таким образом:
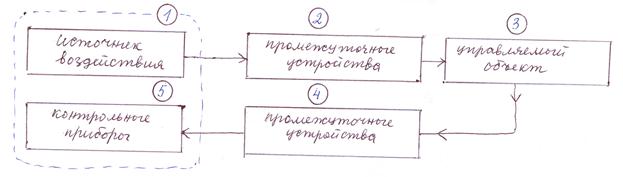
Источником воздействия может быть человек, а может быть изменение каких-либо внешних условий, в которых работает данная система (t, p атмосферное, освещенность, сила эл.тока, изменение частоты какого-либо излучения).
Контрольные приборы дают возможность наблюдать за всеми изменениями процесса в управляемом объекте.
В случае незамкнутой системы процесс работы системы не зависит непосредственно от результата ее воздействия на управляемый объект.
|
|
|
Естественным дальнейшим усовершенствованием автоматической системы является замыкание ее выхода (контрольные приборы) со входом (источник воздействия) таким образом, чтобы контрольные приборы, измерив некоторые величины, характеризующие определенный процесс в управляемом объекте, сами служили бы одновременно и источником воздействия на систему, причем величина этого воздействия зависела бы от того, насколько отличаются измеренные величины на управляемом объекте от требуемых значений.
Таким образом, возникает замкнутая автоматическая система (система управления с обратной связью).
Более развёрнутая структурная схема замкнутой автоматической системы:
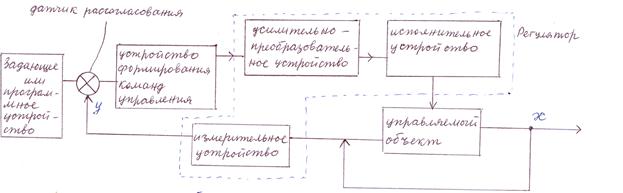
Функциональная схема замкнутой автоматической системы:
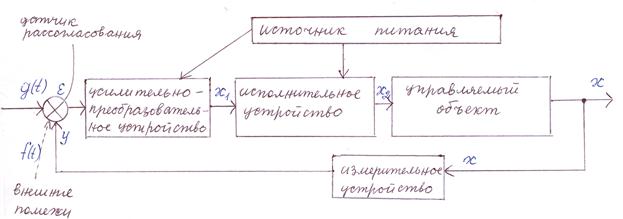
Входные величины  и
и  - соответственно задающее и возмущающее воздействия.
- соответственно задающее и возмущающее воздействия.
Задача системы (АС) состоит в том, чтобы возможно точнее воспроизводить на выходе  задаваемый закон изменения входной величины и возможно полнее подавлять влияние возмущающего воздействия (или внешних помех) , а также других внешних и внутренних помех. Для этой цели выходная величина сравнивается через измеритель
задаваемый закон изменения входной величины и возможно полнее подавлять влияние возмущающего воздействия (или внешних помех) , а также других внешних и внутренних помех. Для этой цели выходная величина сравнивается через измеритель  с входной величиной . Получается рассогласование:
с входной величиной . Получается рассогласование:

Рассогласование (или ошибка)  служит источником воздействия на замкнутую систему, причем система работает на уничтожение или сведение к минимуму величины этого рассогласования (т.е. величины ошибки системы).
служит источником воздействия на замкнутую систему, причем система работает на уничтожение или сведение к минимуму величины этого рассогласования (т.е. величины ошибки системы).
В самом общем случае задающее воздействие может изменяться произвольно.
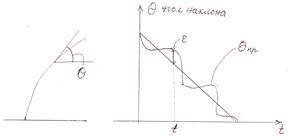
Если – закон изменения входной величины (например, напряжения) задан заранее во времени, то этот закон называется программой управления. Этому случаю соответствует автоматическое управление. Примером автоматического управления может служить программное задание угла наклона продольной оси ракеты-носителя  (при запуске спутника), начиная от вертикального положения на старте до горизонтального положения при выходе на круговую орбиту.
(при запуске спутника), начиная от вертикального положения на старте до горизонтального положения при выходе на круговую орбиту.
|
|
|
|
 Рассогласование служит управляющим сигналом для автоматического выдерживания задаваемого закона
Рассогласование служит управляющим сигналом для автоматического выдерживания задаваемого закона  . .
|
Такие системы также называют системами стабилизации. Случаю 
соответствует собственно автоматическое регулирование на поддержание постоянного значения регулируемой величины (скорости вращения вала двигателя, температуры в некоторой камере, напряжения на клеммах генератора). Это – типичная система регулирования по заданной настройке регулятора.
Регулятором (или автоматическим регулятором) называется автоматически действующее устройство, предназначенное для выполнения задачи регулирования. (Регулятор включает в себя: измерительное, усилительно-преобразовательное и исполнительное устройства, которые служат для формирования регулирующего воздействия на объект,(в котором происходит процесс, подлежащий регулированию). Автоматический регулятор в сочетании с регулируемым объектом называется системой автоматического регулирования. Системы автоматического регулирования, поддерживающие постоянное (в том числе нулевое) значение регулируемой величины, называются также системами стабилизации (например, стабилизация крена самолета углового положения гироплатформы).
В разного рода системах автоматического регулирования и управления действуют одни и те же общие принципы. Управление – более общий принцип, чем регулирование, стабилизация, ориентация, слежение. Система автоматического управления может решать любую из этих задач, но может решать также совокупность такого рода задач и иметь дополнительные функции.
Обратимся к примеру системы автоматического управления полетом самолета (система самолет-автопилот). Автопилот имеет три канала управления: управление движением в вертикальной плоскости (по тангажу), управление движением в горизонтальной плоскости (по курсу) и управление поворотом вокруг собственной оси.
Рассмотрим канал управления по курсу.
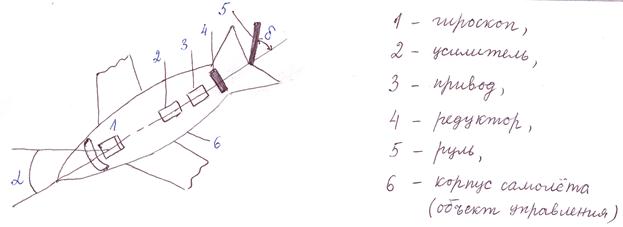
Гироскоп 1 с потенциометрической схемой служит измерительным устройством. Гироскоп сохраняет неизменное направление в пространстве. Поэтому при отклонении самолета на угол  от заданного курса движок, связанный с гироскопом, смещается с нулевой точки. В результате на усилитель подается напряжение, пропорциональное углу отклонения . Оно приводит в движение исполнительное устройство – привод 3 с редуктором 4. При этом вследствие отклонения руля на угол
от заданного курса движок, связанный с гироскопом, смещается с нулевой точки. В результате на усилитель подается напряжение, пропорциональное углу отклонения . Оно приводит в движение исполнительное устройство – привод 3 с редуктором 4. При этом вследствие отклонения руля на угол  самолет возвращается в требуемое положение (после того, как привод с редуктором воздействуют на руль управления).
самолет возвращается в требуемое положение (после того, как привод с редуктором воздействуют на руль управления).
|
|
|
Аналогично устроены и два других канала автопилота.
В данном случае угол поворота руля является регулирующим воздействием на объект. Рассогласование формируется в виде электрической величины:

| где  -заданный курсовой угол. -заданный курсовой угол.
|
Настройка автопилота на заданный курс производится установкой величины  – начального напряжения, пропорционального заданному курсовому углу.
– начального напряжения, пропорционального заданному курсовому углу.
В замкнутых системах автоматического регулирования и управления, как правило, не бывает устойчивого состояния равновесия, т.е. все время имеются какие-либо внешние возмущающие воздействия, порождающие рассогласование, которое заставляет систему работать. Поэтому важнейшим элементом проектирования таких систем является изучение динамических процессов, описываемых обычно системой ДУ, описывающих поведение всех звеньев системы.
Особенностью, усложняющей расчет динамических процессов внутри з.с., является то, что в з.с. все физические величины, представляющие воздействие одного звена на другое, связаны в единую замкнутую цепь. Поэтому приходится уравнения динамики всех звеньев системы решать совместно, т.е. иметь дело с Д.У.высокого порядка. Для этого существует достаточно обширный математический аппарат.
Исторически первыми автоматическими регуляторами с замкнутым циклом были: регулятор уровня воды в котле паровой машины Ползунова (1765 г.), регулятор скорости вала в паровой машине Уатта (1784 г.). Первые же исследования динамических процессов внутри замкнутых автоматических систем, а также исследования в области устойчивости и качества процессов регулирования принадлежат Вышнеградскому.
|
|
|
Выше приводились автоматические системы с одной задаваемой и одной регулируемой величинами. В общем же случае система может иметь много входов и выходов.
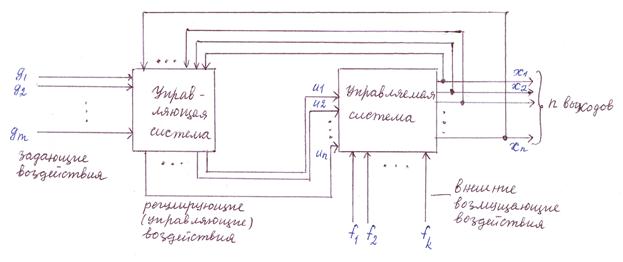
Такие системы называются многомерными или многосвязными. В многомерной системе может быть несколько регуляторов, действующих на один объект, или несколько регуляторов и несколько объектов (регулируемых или управляемых) с перекрестными связями между ними.
Кроме чисто технических автоматических систем аналогичные принципы действия заложены в экономических биологических системах. Что изучается соответствующими направлениями кибернетики и общей теории систем управления.
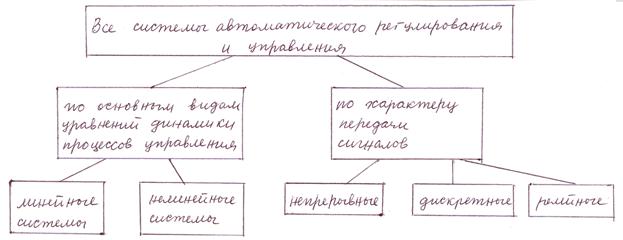
Существуют и другие принципы классификации САУиР, но их мы не будем рассматривать, а остановимся подробно на классификации по основным видам уравнений динамики описываемых процессов и по характеру передачи сигналов.
Дадим определение для каждого класса автоматических систем.
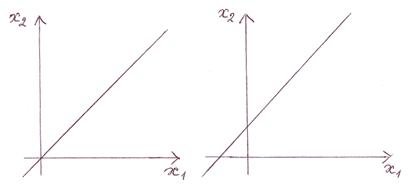
Линейной системой называется такая СА, динамика всех звеньев которой вполне описывается линейными уравнениями (алгебраическими и дифференциальными). Для этого необходимо, чтобы статические характеристики всех звеньев системы были линейными, т.е. имели вид прямой линии.
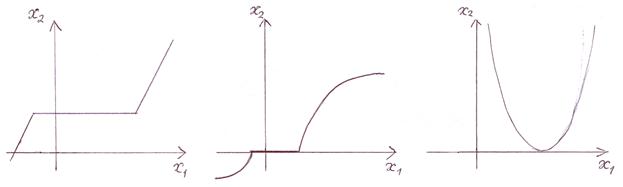
Нелинейной системой называется такая система, в которой хотя бы в одном звене нарушена линейность статической характеристики или же имеет место любое другое нарушение линейности уравнений динамики звена (произведение переменных или их производных, корень, квадрат или более высокая степень переменных, любая другая нелинейная связь переменных и их производных).
Каждый из этих двух классов (линейных и нелинейных) систем делится на подклассы:
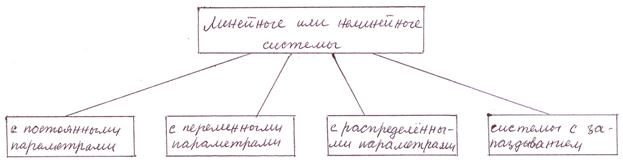
Если динамика всех звеньев системы описывается дифференциальными или алгебраическими уравнениями с постоянными коэффициентами, то систему называют системой с постоянными параметрами.
Если в уравнении динамики звена системы имеется хотя бы один или несколько переменных во времени коэффициентов, то получается система с переменными параметрами.
Если динамика какого-либо звена системы описывается уравнением в частных производных, то система будет системой с распределенными параметрами. (Это имеет место, если описываются процессы в электрической линии или волновые процессы в трубопроводе).
Если какое-либо звено автоматической системы описывается уравнением с запаздывающим аргументом (т.е. звено обладает чисто временным запаздыванием или временной задержкой  передачи сигнала), то система называется линейной системой с запаздыванием.
передачи сигнала), то система называется линейной системой с запаздыванием.
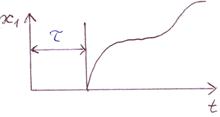
Непрерывной системой (или системой непрерывного действия) называется такая система, в каждом из звеньев которой непрерывному изменению входной величины во времени соответствует непрерывное изменение выходной величины. (При этом закон изменения выходной величины во времени может быть произвольным, в зависимости от формы изменения входной величины и от вида уравнения динамики (или характеристики) звена.
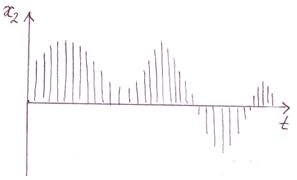
Системой дискретного действия называется такая система, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина изменяется не непрерывно, но имеет вид отдельных импульсов, появляющихся через некоторые промежутки времени.
Системой релейного действия (или релейной) называется такая система, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина в некоторых точках процесса, зависящих от значения входной величины, изменяется скачком. Статическая характеристика релейного звена имеет т.р., как показано в разных вариантах.
Нужно отметить, что наиболее полно разработаны теория и различные прикладные методы для расчета и синтеза обыкновенных линейных систем.
Характеристики типовых звеньев.
Передаточная функция звена – отношение изображения по Лапласу выходной величины к изображению по Лапласу входной величины.
 , где
, где 
при нулевых начальных условиях: 

 .
.
Д.у. звена в общем виде: 
Значит, ПФ в общем случае 
Весовая функция звена – оригинал (т.е.обратное преобразование Лапласа) передаточной функции, а именно:  ,
,
где  - все полюса передаточной функции
- все полюса передаточной функции  ,
,  - вычеты,
- вычеты, 
 - сумма вычетов во всех полюсах передаточной функции.
- сумма вычетов во всех полюсах передаточной функции.
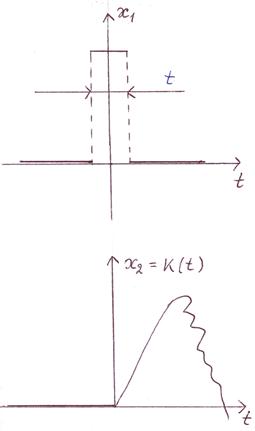
Физический смысл весовой функции есть реакция звена на единичный мгновенный импульс, поданный на вход звена. Иначе говоря, весовая функция  есть переходный процесс на выходе звена при подаче на его вход единичного импульса. Поэтому весовую функцию иногда называют импульсной переходной функцией.
есть переходный процесс на выходе звена при подаче на его вход единичного импульса. Поэтому весовую функцию иногда называют импульсной переходной функцией.
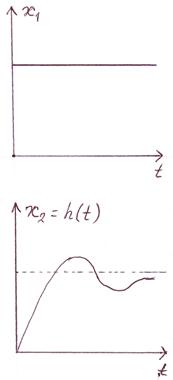
Переходная функция звена (Пер.Ф) – есть реакция звена на единичное ступенчатое воздействие, т.е. переходный процесс на выходе  при единичном скачке
при единичном скачке  на входе звена
на входе звена  .
.
Поскольку известно, что  представляет собой единичный мгновенный импульс
представляет собой единичный мгновенный импульс  , то можно записать следующее соотношение между весовой и переходной функциями звена:
, то можно записать следующее соотношение между весовой и переходной функциями звена: 
|
|
|
|
|
Дата добавления: 2014-11-28; Просмотров: 1568; Нарушение авторских прав?; Мы поможем в написании вашей работы!