КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Баланс активних потужностей асинхронного двигуна можна уявити таким рівнянням
|
|
|
|
Р е = D Р 1е + D Р м + D Р 2е + Р мех = D Р 1е + D Р м + D Р 2е + D Р мех + Р.
Тут:
§ Р е = 3 U 1 × I 1×cos j 1 – потужність, що споживається двигуном з мережі;
§ D Р 1е = 3 I 12 R 1 – електричні втрати в обмотці статора (втрати в міді);
§ D Р м – магнітні втрати в сталі статора;
Магнітні втрати в роторі пропорційні частоті f 2, дуже малі і ними нехтують.
§ D Р 2е = 3 I 22 R 2 – електричні втрати в обмотці ротора (втрати в міді);
§ Р мех – повна механічна потужність, що розвивається двигуном;
§ D Р мех – механічні втрати в двигуні;
§ Р – корисна потужність на валу двигуна.
Корисна механічна потужність двигуна Р менша за потужність Р мех на величину механічних втрат в двигуні: Р = Р мех – D Р мех.
Величина Ре м = Ре – DР1е – DРм уявляє собою електромагнітну потужність двигуна, що передається від статора до ротору через обертове магнітне поле.
В заводському паспорті, на щитку двигуна і в каталогах вказується не споживана з мережи електрична потужність Р е, а корисна механічна потужність Р н на валу двигуна при номінальному режимі роботи.
Асинхронний лінійний двигун (ЛАД).
Лінійний електродвигун винайшов в 1902 р. англійський інженер Трамбета. В ЛАД електроенергія перетворюється безпосередньо в механічну енергію прямолінійного переміщення робочого органу машин і механізмів. В цих агрегатах відсутня громіздка проміжна механічна ланка, що перетворює обертовий рух в поступовий. Крім того, ці двигуни бесконтактні, тобто без механічних зв’язків між статором і вторинним елементом двигуна.
ЛАД використовуються в крнвейєрних лініях, в виконавчих елементах автоматики, у високошвидкісному надземному електротранспорті (швидкість понад 400–500 км/год.) в тому числі поїздів монорейкових естакадних шляхів на повітряній подушці або магнітній підвісці. (Один з випробувальних полігонів вагонів таких поїздів був розташований на березі Київського водосховища.
ЛАД має такі ж конструктивні елементи як і звичайний асинхронний двигун, але дещо видозмінені. Поперечний перетин внутрішньої поверхні статора такого двигуна – прямолінійний, а не круговий. Такий статор можна уявити, якщо подумки розрізати статор звичайного асинхронного двигуна по радіусу і розгорнути на площині. В пазах такого статора розміщується трифазна обмотка. Вторинний елемент – також «пласка» конструкція 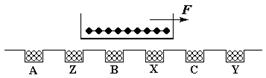 (уявно отримана з розгорнутого ротора асинхронного двигуна).
(уявно отримана з розгорнутого ротора асинхронного двигуна).
При підключенні обмотки статора до мережі трифазної напруги трифазна система струмів утворює магнітний потік, який рухається вздовж статора. Цей магнітний потік, що рухається, індукує в обмотці вторинного елемента ЕРС, під дією якої в ній виникає струм. Взаємодія струму з магнітним потоком, що рухається, утворює силу, яка спрямована в бік руху магнітного потоку і діє на вторинний елемент. Під дією цієї сили вторинний елемент почне переміщуватись в сторону розповсюдження магнітного потоку з деяким відставанням (ковзанням) від нього.
Однофазний асинхронний двигун.
На статорі однофазного асинхронного двигуна розташована одна обмотка. Ротор двигуна має короткозамкнуту обмотку. Протікаючий по обмотці статора змінний струм утворює пульсуючий магнітний потік, що змінює свій напрямок з частотою напруги мережі. Напрямок цього потоку постійний в часі і його значення в часі змінюється за синусоїдальним законом.
 |
Пульсуючий магнітний потік можна уявити як результат складання двох рівних за величиною потоків, що обертаються з однаковою частотою, але в протилежних напрямках. Для кожного моменту часу векторна сума потоків, що обертаються, дорівнює пульсуючому магнітному потоку.
nI = nII = n1 – оберти магнітних потоків; n2 – оберти ротора.
При нерухомому роторі ці потоки (Ф І і Ф ІІ) утворюють обертаючі моменти, напрямки яких, як вже нам відомо, співпадають з напрямком обертання магнітних потоків. Тобто потоки Ф І і Ф ІІ утворюють рівні, але протилежні за напрямком обертаючі моменти, в результаті чого ротор не може зрушити з місця. Якщо ротор обертати зовнішнім зусиллям в напрямку обертання потоку Ф І, то потік Ф І буде прямим, а потік Ф ІІ зворотним до ротора. При цьому ковзання ротора по відношенню до потоків Ф І і Ф ІІ стає різним. Ковзання по відношенню до прямого потоку S I = (n I – n 2) / n I = (n1 – n 2) / n 1, а ковзання по відношенню до зворотного потоку S IІ = (n IІ + n 2) / n IІ = (n 1 + n 2) / n 1 = [ n 1 + n 1(1 – S I)] / n 1 = 2 – S I.
При пуску двигуна S І = 1 і S ІІ = 1. Якщо S І = 0, то S ІІ = 2, а якщо S І = 2, то S ІІ = 0.
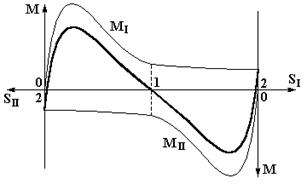 |
За залежностями М І(S I) i M II(S II) можна побудувати сумарний обертаючий момент M (S)
З цієї залежності можна побачити, що при S І = S ІІ = 1 обертаючий момент М = 0. При зменшенні ковзання S І двигун розвиває обертаючий момент, направлений в сторону обертання потоку Ф 1; при зменшенні ковзання S ІІ (S ІІ < 1) – в сторону обертання потоку Ф ІІ: отже, якщо якось привести ротор до обертання, то виникає момент М > 0, який буде підтримувати це обертання.
 Для утворення початкового обертаючого моменту (для пуску двигуна) використовують спеціальну пускову обмотку (ПО), розташовану на статорі під кутом 90° до робочої. Послідовно з пусковою обмоткою включений конденсатор С, завдяки якому струм в цій обмотці випереджує за фазою напругу в мережі на деякий кут.
Для утворення початкового обертаючого моменту (для пуску двигуна) використовують спеціальну пускову обмотку (ПО), розташовану на статорі під кутом 90° до робочої. Послідовно з пусковою обмоткою включений конденсатор С, завдяки якому струм в цій обмотці випереджує за фазою напругу в мережі на деякий кут.
Використання пускової обмотки забезпечує виконання двох необхідних умов отримання магнітного потоку, що обертається (зсув обмоток статора в просторі і зсув струмів в обмотках на деякий кут). Після розгону пускова обмотка відключається.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 748; Нарушение авторских прав?; Мы поможем в написании вашей работы!