КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Общие сведения. Магнитные усилители (МУ), дроссельный МУ, характеристики и режимы работы
|
|
|
|
МАГНИТНЫЕ УСИЛИТЕЛИ
Магнитные усилители (МУ), дроссельный МУ, характеристики и режимы работы. МУ с самоподмагничиванием (МУС). Двухполупериодные схемы МУС.
Лекция №10.
Тема лекции:
Бесконтактными электроаппаратами называют устройства, предназначенные для включения, выключения или переключения (коммутации) электрических цепей без физического разрыва цепи.
Основой построения бесконтактных электроаппаратов служат различного рода нелинейные элементы. Главными из них являются нелинейные индуктивности — ферромагнетик с обмотками и нелинейные активные сопротивления — полупроводниковые приборы.
Ниже будут рассмотрены выполняемые на базе ферромагнетиков и полупроводниковых приборов некоторые основные элементы (магнитные и полупроводниковые усилители, логические элементы), на базе которых могут быть выполнены различного рода бесконтактные электрические аппараты.
Большинство из рассматриваемых элементов называют усилителями. Блок-схема простейшего усилителя приведена на рис. 10.1, в нем последовательно с напряжением питания включены нагрузка Z„ и управляемое нелинейное сопротивление (L = var, или R = var); эта цепь называется рабочей. Нелинейное сопротивление управляется от специального источника сигнала управления (чаше от источника постоянного напряжения Uy. Цепь, состоящая из источника сигнала управления, сопротивления Z и нелинейного сопротивления, называется цепью управления.
С изменением тока цепи управления i y меняются параметры нелинейного сопротивления и ток в рабочей цепи i р. В результате оказывается возможным малыми мощностями в цени управления управлять большими мощностями в нагрузке. Усиление происходит за счет мощности источника питания.
Если управляемым нелинейным сопротивлением является ферромагнитный сердечник с обмотками (L = var) — усилитель называется магнитным. Если это полупроводниковый прибор R= var) — усилитель называется полупроводниковым.
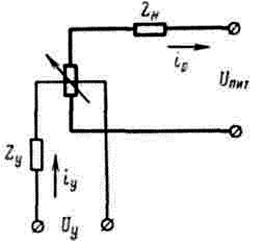
Рис. 10.1. Блок-схема усилителя
Полупроводниковые усилители питаются от источника постоянного или переменного тока. Магнитные усилители — от источника переменного напряжения (иногда импульсного, однополярного).
В то время как принцип работы полупроводникового усилителя весьма прост и достаточно поясняется блок-схемой (рис. 6.1), принцип работы магнитного усилителя требует специального пояснения.
Дело в том, что при перемагничивании ферромагнитного сердечника на его рабочей обмотке (включенной в рабочую цепь) создается противо-э. д. с, препятствующая протеканию тока в рабочей цепи. Если при этом сердечник достиг насыщения (состояния, при котором резко уменьшается магнитная проницаемость ферромагнетика), противо-э. д. с. на его рабочей обмотке резко падает и практически вовсе не препятствует протеканию рабочего тока, т. е. ферромаг нитный сердечник играет роль дросселя, заслонка которого то закрыта (сердечник перемагничивается и не достиг насыщения), то открыта (сердечник, перемагничиваясь, достиг насыщения). Причем в течение одного полупериода напряжения питания сердечник может одну часть этого полупериода находиться в «непроводящем состоянии» (перемагничивается, не достигнув насыщения), а другую в «проводящем» (достигнув насыщения). Ферромагнитный сердечник, работающий в таком режиме, будем называть дросселем насыщения (ДН). В зависимости от того, какую часть полупериода ДН находится в непроводящем состоянии, а какую — в проводящем, будет зависеть и величина тока и напряжения на нагрузке. Соотношение проводящих и непроводящих долей полупериода зависит от многих факторов, в частности от величины напряжения питания и, что весьма существенно, от величины постоянной составляющей тока (или напряжения) на какой-либо из обмоток ДН.
ДН, в котором не предусмотрено протекание по обмоткам по-стоянной составляющей тока, называется дросселем насыщения без подмагничивания, а в котором предусмотрено протекание по какой-либо из обмоток постоянной составляющей тока, называется дро& селем насыщения с подмагничиванием.
Магнитные усилители выполняются на дросселях насыщения с подмагничиванием: благодаря разной величине постоянной составляющей тока (или напряжения) изменяется соотношение проводящих и непроводящих долей полупериода и изменяется ток (напряжение) в нагрузке.
Магнитные усилители делятся на две основные группы: дроссельные магнитные усилители и магнитные усилители с самоподмагничиванием.
Дроссельным называют магнитный усилитель, по рабочим обмоткам которого протекает переменный ток (иногда их называют ДН с подмагничиванием).
Магнитным усилителем с самоподмагничиванием (МУС) называют усилитель, по рабочим обмоткам которого протекает однополупериодный выпрямленный ток (или однополярный импульсный), т. е. в МУС по рабочим обмоткам проходит постоянная составляющая тока, и его сердечники можно было бы назвать ДН с самоподмагничиванием.
а) Принцип действия. Магнитный усилитель (МУ) — это электрический аппарат, предназначенный для усиления электрического сигнала по току, напряжению или мощности. В схеме простейшего дроссельного МУ (ДМУ), называемого дросселем насыщения (рис. 10.2), используется управляемое индуктивное сопротивление. Замкнутый магнитопровод изготавливается из материала с резко выраженной нелинейностью кривой намагничивания B=f(H). Рабочая обмотка переменного тока w p включается в цепь нагрузки RH. В обмотку управления wy подается управляющий постоянный ток I у. Кривая намагничивания материала магнитопровода дана на рис. 10.3. При прохождении переменного тока по обмотке w p на обмотке w y наводится ЭДС. Эта ЭДС будет создавать переменный ток в цепи управления, для ограничения которого включается балластный дроссель Х б.
При отсутствии тока управления (цепь управления разомкнута) индуктивное сопротивление обмотки 
 , (10.1)
, (10.1)
где S- активное сечение магнитопровода;
 –число витков рабочей обмотки;
–число витков рабочей обмотки;
 ее индуктивность;
ее индуктивность;
l –средняя длина магнитной линии в магнитопроводе.
Рис. 10.2. Дроссельный МУ на одном магннтопроводе
 |
Рис. 10.3. Изменение индукции В, напряженности Н и тока I р
при Iу = 0 и Iу = Iутах
При неизменных S, , l; индуктивность  определяется абсолютной магнитной проницаемостью
определяется абсолютной магнитной проницаемостью  . При
. При  состояние магнитопровода характеризуется ненасыщенной зоной 1 (рис. 10.3). В этой зоне магнитная проницаемость
состояние магнитопровода характеризуется ненасыщенной зоной 1 (рис. 10.3). В этой зоне магнитная проницаемость  велика и индуктивное сопротивление обмотки равное
велика и индуктивное сопротивление обмотки равное
 ,
,
максимально.
Обычно  поэтому ток в цепи рабочей обмотки определяется только значением
поэтому ток в цепи рабочей обмотки определяется только значением  , и имеет минимальное значение, равное
, и имеет минимальное значение, равное  . Напряженность магнитного поля
. Напряженность магнитного поля  находится по индукции
находится по индукции  .
.
Подадим в обмотку управления такой постоянный ток управления IУmax, чтобы рабочая зона перешла в область 2. В этой области насыщения материал имеет магнитную проницаемость  Индуктивное сопротивление рабочей обмотки
Индуктивное сопротивление рабочей обмотки  резко уменьшается. Значения
резко уменьшается. Значения  выбираются так, что
выбираются так, что  . Тогда ток в цепи определяется только сопротивлением нагрузки. При этом все напряжение источника питания приложено к сопротивлению
. Тогда ток в цепи определяется только сопротивлением нагрузки. При этом все напряжение источника питания приложено к сопротивлению  нагрузки
нагрузки  и активному сопротивлению rррабочей обмотки
и активному сопротивлению rррабочей обмотки
Мы рассмотрели два крайних режима усилителя — режим холостого хода, когда  и ток в нагрузке имеет минимальное значение
и ток в нагрузке имеет минимальное значение  и режим максимального тока нагрузки. При плавном увеличении тока
и режим максимального тока нагрузки. При плавном увеличении тока  ток нагрузки плавно увеличивается от
ток нагрузки плавно увеличивается от  до максимального значения
до максимального значения  за счет уменьшения магнитной проницаемости. Характеристика управления ДМУ приведена на рис. 10.4. По оси абсцисс отложен ток управления, приведенный к рабочей обмотке
за счет уменьшения магнитной проницаемости. Характеристика управления ДМУ приведена на рис. 10.4. По оси абсцисс отложен ток управления, приведенный к рабочей обмотке

Идеальная характеристика управления 1 является прямой, идущей из начала координат под углом 45° к оси  . Реальная характеристика 2 отличается от идеальной наличием тока холостого хода и плавным переходом от линейной части характеристики к току
. Реальная характеристика 2 отличается от идеальной наличием тока холостого хода и плавным переходом от линейной части характеристики к току
В линейной зоне характеристики соблюдается равенство средних значений МДС
 . (10.2)
. (10.2)
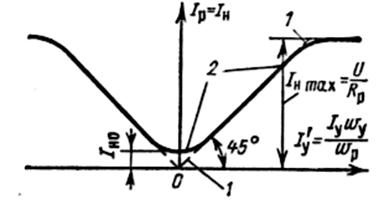 |
Рис. 10.4. Характеристика управления ДМУ
Равенство (10.2) не зависит от колебаний питающего напряжения, сопротивления нагрузки и частоты источника. Данному значению тока управления всегда соответствует единственное значение тока нагрузки  . Таким образом, ДМУ является управляемым источником тока.
. Таким образом, ДМУ является управляемым источником тока.
Вследствие низких значений коэффициента усиления и большой массы ДМУ в настоящее время применяются редко, в основном как измерительные трансформаторы постоянного тока и напряжения. В первом случае роль обмотки управления wy выполняет шина, по которой проходит измеряемый постоянный ток  . Под воздействием магнитного потока, созданного током I у, магнитопроводы 1 и 11 насыщаются (рис. 10.5, а). Рабочие обмотки
. Под воздействием магнитного потока, созданного током I у, магнитопроводы 1 и 11 насыщаются (рис. 10.5, а). Рабочие обмотки  подключены к источнику переменного напряжения uРи создают, магнитные поля с индукцией Bp1 и Вр2. В цепь рабочих обмоток через выпрямительный мост включен измерительный прибор ИП, который является нагрузкой усилителя. Допустим, в рассматриваемый полупериод вектор индукции ВР1 совпадает по направлению с вектором индукции Ву управляющего поля обмотки wy, а вектор индукции Вр2 направлен встречно вектору Ву. В результате магнитопровод 1 насыщен и сопротивление обмотки хр1 переменному току равно нулю, а магнитопровод 11, наоборот, далек от насыщения. Материал магнитопроводов 1 и 11 имеет кривую намагничивания, форма которой близка к прямоугольной. Обозначим через Вs значение индукции насыщения материала магнитопровода. В таком материале при суммарном значении магнитной индукции
подключены к источнику переменного напряжения uРи создают, магнитные поля с индукцией Bp1 и Вр2. В цепь рабочих обмоток через выпрямительный мост включен измерительный прибор ИП, который является нагрузкой усилителя. Допустим, в рассматриваемый полупериод вектор индукции ВР1 совпадает по направлению с вектором индукции Ву управляющего поля обмотки wy, а вектор индукции Вр2 направлен встречно вектору Ву. В результате магнитопровод 1 насыщен и сопротивление обмотки хр1 переменному току равно нулю, а магнитопровод 11, наоборот, далек от насыщения. Материал магнитопроводов 1 и 11 имеет кривую намагничивания, форма которой близка к прямоугольной. Обозначим через Вs значение индукции насыщения материала магнитопровода. В таком материале при суммарном значении магнитной индукции  напряженность поля
напряженность поля  и
и  B>BS
B>BS  и, следовательно,
и, следовательно,  и не оказывает влияния на полное сопротивление цепи рабочих обмоток. В магнитопроводе 11, где
и не оказывает влияния на полное сопротивление цепи рабочих обмоток. В магнитопроводе 11, где  <
<  можно записать
можно записать
 ,
,
или
 (10.3)
(10.3)
Из этого равенства следует, что ток  в течение рассматриваемого полупериода повторяет форму тока управления I у. Так как
в течение рассматриваемого полупериода повторяет форму тока управления I у. Так как  то и ток
то и ток  в течение данного полупериода, т.е. принимает прямоугольную форму. В следующий полупериод встречно направлены вектора индукции ВР1 и By в магнитопроводе 1. Ток
в течение данного полупериода, т.е. принимает прямоугольную форму. В следующий полупериод встречно направлены вектора индукции ВР1 и By в магнитопроводе 1. Ток  изменит знак, но сохранит прямоугольную форму. На рис. 10., б показаны временные зависимости тока управления Iу, тока в цепи рабочих обмоток
изменит знак, но сохранит прямоугольную форму. На рис. 10., б показаны временные зависимости тока управления Iу, тока в цепи рабочих обмоток  и тока
и тока  протекающего через измерительный прибор ИП. Мгновенные значения токов связаны равенством
протекающего через измерительный прибор ИП. Мгновенные значения токов связаны равенством  которое выполняется и для средних значений
которое выполняется и для средних значений 
Реальная форма кривой намагничивания материала магнитопроводов отличается от прямоугольной. Поэтому и форма тока i pне прямоугольна, а в токе i Нпоявляются глубокие провалы, что вызывает определенную погрешность измерения.
Рассмотренное устройство может быть использовано и в качестве измерительного трансформатора напряжения постоянного тока. Для этого многовитковая обмотка управления w у подключается к измеряемому напряжению U через большое добавочное сопротивление  (рис. 10.5, в).
(рис. 10.5, в).
Ток в обмотке управления wy пропорционален напряжению:  Для уменьшения потерь в добавочном сопротивлении ток
Для уменьшения потерь в добавочном сопротивлении ток  берется малым — около 10 мА. Измерение этого тока производится так же, как в рассмотренной выше схеме.
берется малым — около 10 мА. Измерение этого тока производится так же, как в рассмотренной выше схеме.
 |
Рис. 10.5. Схема трансформатора постоянного тока (а), изменение токов в его обмотках (б) и измерительный трансформатор постоянного напряжения (в)
УСИЛИТЕЛЬ С САМОНАСЫЩЕНИЕМ (МУС)
а) Физические процессы. Если в цепь рабочей обмотки МУ включить диод, то под действием постоянной составляющей выпрямленного тока происходит подмагничивание магнитопровода. Такие усилители называются усилителями с самоподмагничиванием или с самонасыщением (МУС). При рассмотрении такого усилителя (рис. 10.6) примем, что обратное сопротивление диода VD равно бесконечности, а прямое учитывается сопротивлением RB. В цепи управления включен балластный дроссель Хб для ограничения переменного тока, создаваемого рабочей обмоткой. Полярность напряжения источника, при которой диод проводит ток, примем за положительную, полупериод, при котором ток проходит через нагрузку, назовем рабочим (РП). Процессы, происходящие в МУС, в основном определяются формой динамической петли гистерезиса материала магнитопровода. Динамической петлей гистерезиса материала называется зависимость В(Н) при быстром изменении намагничивающего тока. Вследствие магнитной вязкости и вихревых токов в материале процесс перемагничивания замедляется и ширина динамической петли гистерезиса превышает ширину статической петли. Чем больше  тем шире петля гистерезиса. Для материала с высокой степенью прямоугольности кривой намагничивания динамическая петля гистерезиса имеет форму параллелограмма (рис. 10.7, а).
тем шире петля гистерезиса. Для материала с высокой степенью прямоугольности кривой намагничивания динамическая петля гистерезиса имеет форму параллелограмма (рис. 10.7, а).
 |
Рис. 10.6. Схема однополупериодного МУС
При отсутствии управляющего поля магнитопровод под-магничивается полем, созданным постоянной составляющей тока рабочей обмотки. Под действием этого поля в магнитопроводе устанавливается остаточная индукция  В рабочем полупериоде рабочая точка, характеризующая состояние магнитопровода, с ростом тока перемещается по участку 1— 3. Так как магнитопровод насыщен, индуктивное сопротивление обмотки wp равно нулю. Все напряжение источника приложено к активному сопротивлению цепи
В рабочем полупериоде рабочая точка, характеризующая состояние магнитопровода, с ростом тока перемещается по участку 1— 3. Так как магнитопровод насыщен, индуктивное сопротивление обмотки wp равно нулю. Все напряжение источника приложено к активному сопротивлению цепи  К концу рабочего полупериода состояние магнитопровода вновь возвращается в точку 1. Таким образом, при отсутствии сигнала управления ток нагрузки в рабочий полупериод
К концу рабочего полупериода состояние магнитопровода вновь возвращается в точку 1. Таким образом, при отсутствии сигнала управления ток нагрузки в рабочий полупериод


В следующий полупериод диод не пропускает ток и состояние магнитопровода характеризуется точкой 11 (напряжение источника приложено к вентилю и i Р =0)
 | |||||||||||||||||
 | |||||||||||||||||
 | |||||||||||||||||
 | |||||||||||||||||
 | |||||||||||||||||
 | |||||||||||||||||
 | |||||||||||||||||
 | |||||||||||||||||
 | |||||||||||||||||
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 877; Нарушение авторских прав?; Мы поможем в написании вашей работы!