КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Правила прокладання теодолітного ходу
|
|
|
|
1Місцевість для прокладання ходу повинна бути по можливості рівною, непересіченою. Слід обирати найсприятливішу для пересування і вимірювання кутів і відстаней трасу (вздовж доріг, просік, галявин лісу).
2Необхідно прагнути до того, щоб загальна довжина ходу і число сторін у ньому були найменшими. Максимальна довжина ходу допускається не більше 10 км, а під час роботи з КТД-1 – 20 км. Довжина сторін повинна бути не менше 100 м, а під час роботи з КТД-1 – не менше 125 м.
3Кути, які примикають, повинні вимірюватися по можливості від двох орієнтирних напрямків.
4Під час вимірювання кутів повороту перше наведення здійснюється на задню, за ходом точку. Кути повороту записують з округленням до 0,1’ під час роботи з теодолітом і до 0-01 – під час роботи з бусоллю.
5Незалежно від виду ходу обчислюють вліво лежачі за ходом кути.
6Точки ходу позначають кілками діаметром 3-4см з відміткою для центрування приладу. Кілки забивають у землю так, щоб над поверхнею землі залишався кінець не більше 2-3 см. Поряд з кілком ставиться сторожок (кілок із зарубкою) з надписом номера точки. Точкою ходу є кілок, а не сторожок.
7Прилад з точки дозволяється знімати і переносити на наступну точку тільки після того, як буде встановлено, що під час вимірювання кута і відстані не допущено помилок.
8Вимірювання кута між двома напрямками виконується способом вимірювання окремого кута. За наявності більше трьох напрямків використовується спосіб кругових прийомів.
9Довжини сторін вимірюються двічі одним приладом або двома способами.
10 Кути нахилу для приведення ліній до горизонту вимірюються по одному положенню круга з округленням до 10’. Якщо кути нахилу більше 20, виміряні відстані приводяться до горизонту.
11 З метою прискорення робіт прокладання ходу може здійснюватися орієнтованим приладом.
Обчислення ходу. Обчислення координат точок ходу проводиться одночасно з проведенням польових робіт і зводиться до послідовного обчислення прямих геодезичних задач.
Дирекційний кут першої сторони ходу обчислюється як сума дирекційного кута початкового орієнтирного напрямку αН і кута, що примикає, βО:
a1= aв+bО.
Дирекційні кути наступних сторін обчислюються за загальним правилом: дирекційний кут наступної сторони an дорівнює зворотному дирекційному куту попередньої сторони an-1±1800 плюс виміряний кут повороту, зліва по ходу лежачий:
an = an-1 ± 1800 + bn.
Отримавши дирекційний кут, визначають гострий кут α’, який примикає до осі Х (якщо обчислення виконується на ЕОМ, то дирекційний кут до кута у першій чверті не приводиться).
За формулами прямої геодезичної задачі послідовно обчислюють координати всіх поворотних точок ходу, включаючи і кінцеву:
Продовження додатку В
Хn = Xn-1 + ∆Xn; Yn = Yn-1 + ∆Yn; ∆Xn = dn cos an; ∆Yn = dn sin an,
де dn – довжина n-ї сторони ходу;
an – дирекційний кут цієї сторони.
Під час роботи з теодолітом (КТД-1) приріст координат і координати точок ходу округлюються до 0,1 м, а під час роботи з бусоллю – до 1 м.
На кінцевій точці ходу (опорному пункті) обчислюється кутова нев’язка і нев’язка у координатах.
Кутова нев’язка ходу fβ отримується як різниця обчисленого дирекційного кута кінцевого (примикаючого) орієнтирного напрямку  і заданого дирекційного кута
і заданого дирекційного кута  :
:
fβ = - .
Отримана кутова нев’язка порівнюється з допустимою. Допустима кутова нев’язка ходу  не повинна перевищувати таких значень:
не повинна перевищувати таких значень:
- 0,6’√n – під час вимірювання кутів теодолітом Т10В;
- 0,8’√n – під час вимірювання кутів теодолітами ТТ-3 і КТД-1;
- 0-01√n – під час вимірювання кутів ПАБ-2А,
де n – число кутів повороту, враховуючи і примикаючі.
Нев’язки у координатах fХ і fY розраховуються як різниця обчислених і заданих координат кінцевої точки ходу, яка визначається за формулою
fХ =  ; fY =
; fY =  .
.
Сумарна нев’язка fl, яка називається також лінійною нев’язкою ходу, визначається за формулою
fl =  .
.
Точність лінійних вимірювань оцінюється шляхом порівняння відносної лінійної нев’язки з допустимою. Відносна лінійна нев’язка ходу обчислюється як відношення лінійної нев’язки fl до периметра ходу Р:
 .
.
Допустима відносна лінійна нев’язка ходу не повинна перевищувати таких величин:
- 1/600 — під час вимірювання відстаней мірною стрічкою, ДДІ, КТД-1;
- 1/300 — під час вимірювання відстаней ДДІ-3 і теодолітом по далекомірній рейці.
За умови недопустимої кутової або лінійної нев’язки перевіряють правильність виписки вихідних даних (дирекційних кутів і координат) кутів повороту і довжин сторін, а також правильність обчислення у журналі і у бланку. Якщо не буде виявлено помилок, то польові роботи виконуються заново.
Продовження додатка В
Хід орієнтованим приладом використовується для скорочення часу на виконання польових вимірювальних і обчислювальних робіт. Особливо значні переваги він має під час роботи з КТД-1 під час прокладання ходу у поєднанні із засічками.
Під час роботи орієнтованим приладом горизонтальні кути у точках ходу не вимірюються, а одразу з лімбу зчитуються дирекціоні кути сторін (напрямків).
Польові роботи під час прокладання ходу орієнтованим приладом полягають у такому, рис.4. На початковій точці М теодоліт орієнтують за заданим початковим дирекційним кутом αН, для чого на лімбі теодоліту установлюють відлік, який дорівнює αН. За цим відліком зорова труба поворотом лімба наводиться на орієнтирний пункт.
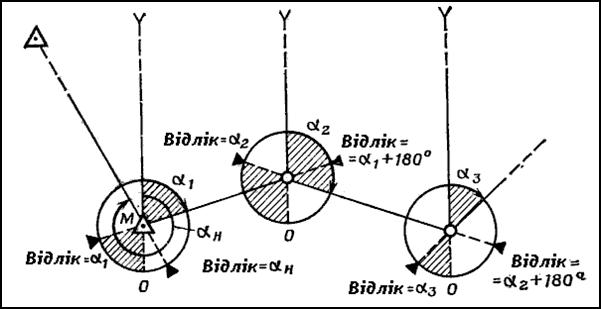
Рисунок 4 – Прокладання ходу орієнтованим приладом
Закріпивши у такому положенні лімб, звільняють алідаду і наводять вертикальну нитку сітки (бісектор) зорової труби на центральну марку далекомірної рейки або на віху, яка встановлена на першій точці повороту ходу. Відлік по лімбу буде відповідати дирекційному куту першої сторони ходу.
Потім прилад переносять на першу точку і орієнтують по зворотному дирекційному куту першої сторони ходу α1 + 1800 по напрямку на початковий пункт М.
Звільнивши алідаду, візирують на марку (віху), яка встановлена на другій точці повороту, і зчитують з лімба дирекційний кут другої сторони ходу α2.
Таким чином, визначають дирекційні кути всіх сторін ходу, включаючи і дирекційний кут кінцевого орієнтирного напрямку.
Довжини сторін вимірюються у встановленому порядку.
Засічки. Засічкою називається спосіб визначення координат точки, що прив’язується, за координатами двох і більше вихідних пунктів.
Залежно від приладів, що використовуються, умов видимості і наявності вихідних пунктів розрізняють пряму, зворотну і комбіновану засічки.
Під час засічки дирекційні кути напрямків на вихідних пунктах і на точках, що прив’язуються, визначають безпосередньо на місцевості гіроскопічним або астрономічним способом. Для визначення дирекційних кутів з вихідних пунктів на точки, що прив’язуються, використовують також вихідні напрямки, дирекційні кути яких вибирають із каталогу (списку) або визначають рішенням зворотної геодезичної задачі за координатами вихідних пунктів.
Продовження додатка В
Кути біля точки, координати якої визначають засічкою (кути засічки), повинні бути не менше 30 і не більше 1500.
Відстані вимірюють квантовим топографічним далекоміром КТД-1 або іншими способами, які забезпечують відносну серединну помилку не більше 1:700.
Засічки за допомогою теодоліту (КТД-1, Ги-Е1) забезпечують визначення координат точки, що прив’язується, стосовно пунктів геодезичної мережі з круговою серединною помилкою до 6 м, під час вимірювання кутів бусоллю – до 10 м.
Пряма засічка. Прямою засічкою називається спосіб визначення координат точки, що прив’язується, коли всі вимірювання проводяться на вихідних пунктах.
Розрізняють такі різновиди прямої засічки: за виміряними кутами; орієнтованим приладом; полярна.
Прямою засічкою за виміряними кутами називається спосіб визначення координат вершини трикутника Р, рис.5, за заданими координатами трьох вихідних точок пунктів А, В і С і кутами α1, β1, α2 і β2, виміряними біля цих пунктів.
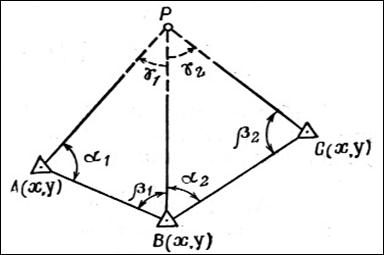
Рисунок 5 – Пряма засічка за виміряними кутами
Пряму засічку за виміряними кутами за таблицями логарифмів вирішують у такій послідовності:
1 Розв’язанням зворотних геодезичних задач за заданими координатами вихідних пунктів А, В і С обчислюють дирекційні кути (АВ) і (ВС) і довжини сторін трикутників  і
і  :
:
 .
.
2 Визначають величини кутів засічки γ1 і γ2 як доповнення сум виміряних кутів до 1800:
γ1 = 1800 – (α1 + β1); γ2 = 1800 – (α2 + β2).
3 Обчислюють дирекційні кути напрямків з вихідних пунктів А, В і С на визначену точку Р: (АР), (ВР) і (СР).
(АР) = (АВ) - α1;
(ВР)1 = (АВ) ± 1800 + β1 або (ВР)2 = (ВС) - α2.
Продовження додатка В
(СР) = (ВС) ± 1800 + β2.
4 Вирішуючи трикутник АВР і ВСР за теоремою синусів, знаходять довжини сторін АР, ВР і СР:
 ;
;
 ;
;  ;
;
 ;
;  .
.
5 Розв’язанням двох прямих геодезичних задач по напрямках АР і СР отримаємо координати точки Р:
із трикутника АВР
ХР = ХА +  cos (AP); YP = YA + sin (AP);
cos (AP); YP = YA + sin (AP);
із трикутника ВCР (13)
ХР = ХC +  cos (CP); YP = YC + sin (CP).
cos (CP); YP = YC + sin (CP).
Під час виконання прямої засічки за виміряними кутами за таблицями логарифмів проміжний контроль здійснюється шляхом порівняння логарифмів сторони  , що отримані рішенням трикутників АВР і ВСР. Якщо засічка виконувалася за допомогою теодоліта, то значення логарифмів сторони не повинні відрізнятися більше ніж на 60 одиниць п’ятизначного логарифма або не більше 100 одиниць під час засічки за допомогою бусолі.
, що отримані рішенням трикутників АВР і ВСР. Якщо засічка виконувалася за допомогою теодоліта, то значення логарифмів сторони не повинні відрізнятися більше ніж на 60 одиниць п’ятизначного логарифма або не більше 100 одиниць під час засічки за допомогою бусолі.
Пряма засічка вважається виконаною правильно, якщо розбіжність у координатах точки Р, отриманих з пунктів А і С, не перевищує 20 м під час вимірювання кутів теодолітом (КТД-1) і 25 м під час вимірювання кутів бусоллю. За кінцеве значення беруть їх середнє значення з округленням до цілих метрів.
Різновидом прямої засічки по виміряних кутах є випадок, коли між пунктами А, В і С відсутня видимість, рис.6,а, але з кожного із цих пунктів спостерігається четвертий пункт D і дирекційні кути (АD), (ВD) і (СD) відомі або можуть бути обчислені рішенням ОГЗ і за виміряними  А, В і С можна отримати дирекційні кути напрямків з вихідних пунктів на точку, що визначається, (АР), (ВС) і (СР).
А, В і С можна отримати дирекційні кути напрямків з вихідних пунктів на точку, що визначається, (АР), (ВС) і (СР).
1 Розв’язанням зворотних геодезичних задач за координатами пунктів А, В, С і D обчислюють дирекційні кути (АВ), (ВС), (АD), (ВD) і (СD).
2 За дирекційними кутами (АD), (ВD) і (СD) і виміряними кутами на пунктах А, В і С знаходять дирекційні кути напрямків АР, ВР і СР.
На рис.10 зображено два випадки положення пункту D стосовно напрямків АР, ВР і СР.
У першому випадку:
(АР) = (АD) + А;
(ВР) = (ВD) + В;
(СР) = (СD) + С.
У другому випадку:
(АР) = (АD) - А;
(ВР) = (ВD) - В;
(СР) = (СD) - С.
У загальному випадку, якщо виміряний кут буде правим стосовно напрямку на пункт D, він віднімається, якщо лівим, – додається.
3.За різницею дирекційних кутів сторін трикутників АВР і ВСР визначають внутрішні кути α1, β1 і α2, β2:
Продовження додатка В
α1 = (АВ) – (АР); α2 = (ВС) – (ВР);
β1 = (ВР) – (АВ) ± 1800
β2 = (СР) – (ВС) ± 1800.
4 Подальші обчислення виконуються так, як і під час прямої засічки за наявності видимості між вихідними пунктами.
Якщо відсутній загальний орієнтир (пункт D), але з кожного з вихідних пунктів А, В і С спостерігаються пункти з відомими координатами або орієнтирні пункти, рис.6,б, дирекційні кути напрямків, які можуть бути отримані із каталогів, пряма засічка вирішується у тому ж порядку.
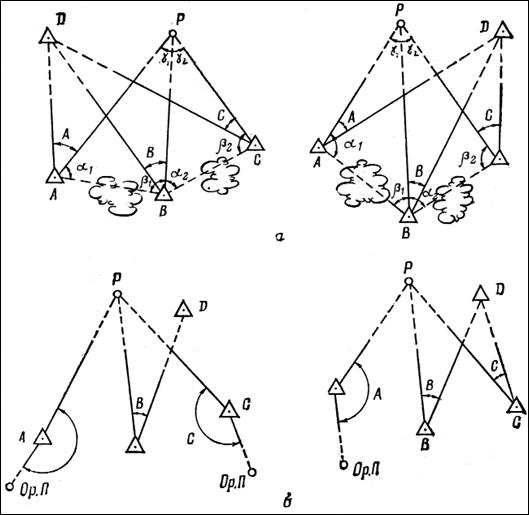
Рисунок 6 – Різновиди прямої засічки за виміряними кутами:
а – від загального орієнтиру; б – від різних орієнтирів
Прямою засічкою орієнтованим приладом називається спосіб визначення координат точки Р, що прив’язується, рис.7, за дирекційними кутами напрямків на неї (АР), (ВР) і (СР) з трьох вихідних пунктів А, В і С.
На кожному вихідному пункті прилад орієнтують за дирекційним кутом, який визначений гіроскопічним, геодезичним або астрономічним способом. З лімба орієнтованого приладу зчитують безпосередньо дирекційні кути на точку Р, що прив’язується, (АР), (ВР) і (СР).
Порядок обчислення засічкою за таблицями логарифмів аналогічний обчисленню засічки за виміряними кутами. Але значення кутів α1, β1, α2, β2, γ1, γ2 визначаються як різниця відповідних дирекційних кутів напрямків з вихідних пунктів.
Продовження додатка В
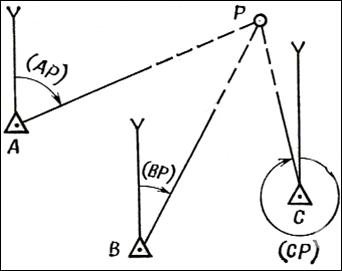
Рисунок 7 – Пряма засічка орієнтованим приладом
Пряма засічка орієнтованим приладом обчислюється на ЕКОМ за формулами іншого виду, ніж під час рішення засічки за виміряними кутами. Тоді виключається необхідність обчислення внутрішніх кутів трикутника, і час, який витрачається на розв’язання задач, значно скорочується. Виведемо ці формули.
За формулами розв’язання зворотної геодезичної задачі маємо:
tg(AP) = (YP – YA) / (XР – XA); tg(BP) = (YP – YB) / (XP – XB);
або
(YP – YA) = (XР – XA) tg(AP); (YP – YB) = (XP – XB) tg(BP).
Із різниці формул маємо:
YВ – YA = XР tg(AP) - XA tg(AP) - XP tg(BP) + XB tg(BP);
звідки
XP = (YВ – YA + XA tg(AP) - XB tg(BP)) / (tg(AP) - tg(BP)).
Отримавши абсцису точки Р, за формулою визначимо ординату YP:
YP = (XР – XA) tg(AP) + YA.
Робочі формули рішення прямої засічки на ЕКОМ за дирекційними кутами із двох трикутників будуть мати вигляд:
 .
.
Продовження додатка В
Якщо дирекційні кути (АР), (ВР) і (СР) наближаються до 90 або 2700, тобто їх тангенси необмежено збільшуються, доцільно вирішувати задачу за формулами котангенсів дирекційних кутів:
 .
.
Полярною засічкою називають спосіб визначення координат точки Р, що прив’язується, за дирекційними кутами (АР), (ВР) і відстанями і з двох вихідних пунктів А і В, рис.8.
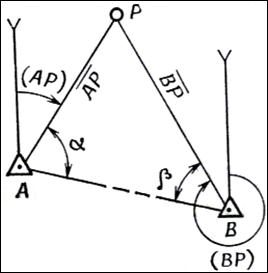
Рисунок 8 – Полярна засічка
Відстані вимірюють за допомогою квантового топографічного далекоміра КТД-1. Дирекційні кути (АР) і (ВР) визначають гіроскопічним або астрономічним способом, якщо вихідні пункти не мають орієнтирних напрямків і відсутня взаємна видимість між ними. Якщо орієнтирні напрямки або взаємна видимість між вихідними пунктами А і В є, то дирекційні кути (АР) і (ВР) визначають геодезичним способом. У цьому випадку вимірюють кути α і β.
Координати точки Р обчислюють рішенням двох прямих геодезичних задач. Засічка вважається виконаною правильно, якщо розбіжність у координатах точки Р, що отримані з пунктів А і В, не перевищують 20 м. За кінцевий результат беруть середнє значення координат, яке округлене до 1 м.
Обернена (зворотна) засічка. Оберненою засічкою називається спосіб визначення координат, коли вимірювання проводяться на точці, що прив’язується. Розрізняють такі види засічки: за виміряними кутами; орієнтованим приладом; за виміряним кутом і відстанню.
Оберненою засічкою за виміряними кутами називається спосіб визначення координат точки Р, рис.9, за координатами трьох вихідних пунктів А, В і С і кутами α і β, які виміряні на точці, що визначається, між напрямками на вихідні пункти.
Продовження додатка В
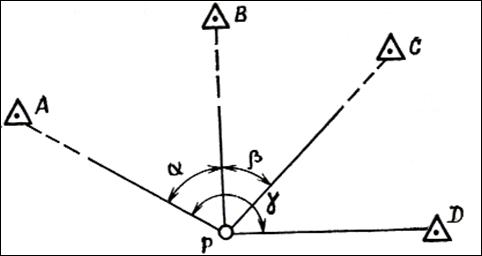
Рисунок 9 – Обернена засічка за виміряними кутами
Для контролю польових вимірювань і обчислень додатково вимірюється кут γ між напрямками на пункт А і на четвертий вихідний пункт D.
Взаємне розташування вихідних пунктів і точки, що визначається, впливає на точність координат, а у деяких випадках задача взагалі не має розв’язку.
Виведемо формули рішення зворотної засічки для випадку, коли точка Р перебуває всередині трикутника АВС, рис.10, і з їх аналізу робимо висновок щодо можливості розв’язання задачі залежно від положення точки Р.
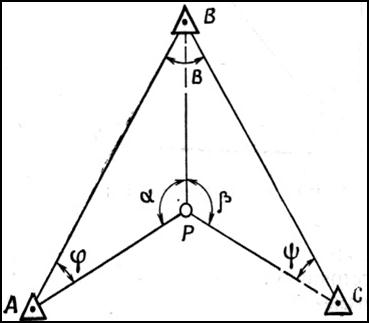
Рисунок10 – Рішення оберненої засічки за виміряними кутами під час перебування точки,
що визначається, всередині трикутника
Розв’язанням зворотних геодезичних задач за координатами пунктів А, В і С визначаємо довжину і дирекційні кути сторін АВ і ВС трикутника АВС:
tg(AВ) = (YВ – YA) / (XВ – XA);
 = (YВ – YA) / sin (AB) = (XВ – XA) / cos (AB);
= (YВ – YA) / sin (AB) = (XВ – XA) / cos (AB);
Продовження додатка В
tg(ВC) = (YC – YB) / (XC – XB);
 = (YC – YB) / sin (BC) = (XC – XB) / cos (BC).
= (YC – YB) / sin (BC) = (XC – XB) / cos (BC).
Знайдемо величину  В у чотирикутнику АВСР:
В у чотирикутнику АВСР:
В = (АВ) – [(ВС) ± 1800].
Позначимо ВАР через φ, ВСР – через ψ.
Якщо знайдемо величини кутів φ і ψ, то координати точки Р отримаємо рішенням двох прямих засічок за трикутниками АВР і ВСР.
Із чотирикутника АВСР
(φ + ψ) / 2 = (3600 – (α +β + В)) / 2.
Визначимо піврізницю кутів φ і ψ. Для цього складемо два рівняння:
із трикутника АВР
 / sin φ = / sin β; = ( sin φ) / sin α
/ sin φ = / sin β; = ( sin φ) / sin α
із трикутника ВСР
/ sin ψ = / sin β; = ( sin ψ) / sin β.
Ліві частини рівнянь (23) рівні, тому
( sin φ) / sin α = ( sin ψ) / sin β.
Зробимо перестановку:
sin ψ / sin φ = ( / sin α) / ( / sin β)
і позначимо
( / sin α) / ( / sin β) = tg θ,
тоді
sin ψ / sin φ = tg θ.
Представимо це рівняння у вигляді
sin φ / sin ψ = 1 / tg θ.
Складемо похідну пропорцію за правилом – сума членів першого відношення належить до їх різниці як сума членів другого відношення до їх різниці:
(sin φ + sin ψ) / (sin φ - sin ψ) = (1 + tg θ) / (1 - tg θ).
Перетворимо праву і ліву частини отриманого рівняння
(sin φ + sin ψ) / (sin φ - sin ψ) = (2 sin ((φ + ψ)/2) cos ((φ - ψ)/2)) / (2 sin ((φ - ψ)/2) cos ((φ
+ψ)/2)) = tg ((φ + ψ)/2) ctg ((φ - ψ)/2);
(1 + tg θ) / (1 - tg θ) = (tg 450 + tg θ) / (1 - tg 450 tg θ) = tg (450 - θ).
Після перетворення рівняння набере вігляду
tg ((φ + ψ)/2) ctg ((φ - ψ)/2) = tg (450 - θ),
звідки
ctg ((φ - ψ)/2) = tg (450 - θ) сtg ((φ + ψ)/2)
або
tg ((φ - ψ)/2) = сtg (450 - θ) tg ((φ + ψ)/2).
Півсума і піврізниця дає можливість визначити ці кути:
Продовження додатка В
φ = (φ + ψ)/2 + (φ - ψ)/2;
ψ = (φ + ψ)/2 + (φ - ψ)/2.
Маючи кути φ і ψ, обчислюємо дирекційні кути (АР), (ВР) і (СР):
(АР) = (АВ) + φ;
(ВР) = (АВ) – (α + φ) = (ВС) + (1800 – β +ψ);
(СР) = (ВС) ± 1800 – ψ
і довжини сторін
 = ( / sin α) sin (α + φ);
= ( / sin α) sin (α + φ);
= ( / sin α) sin φ = ( / sin β) sin ψ;
 = ( / sin β) sin (β + ψ).
= ( / sin β) sin (β + ψ).
Розв’язанням прямих геодезичних задач за напрямками АР, ВР і СР знаходимо координати пункту Р:
ХР = ХА + cos (AP);
YР = YА + sin (AP);
ХР = ХB + cos (BP);
YР = YB + sin (BP);
ХР = ХC + cos (CP);
YР = YC + sin (CP).
Обернена засічка орієнтованим приладом. Під час роботи орієнтованим приладом замість вимірювання кутів α і β з точки Р, що прив’язується, визначають дирекційні кути (РА), (РВ) і (РС). Прилад орієнтують за дирекційним кутом вихідного напрямку, який визначають гіроскопічним або астрономічним способом.
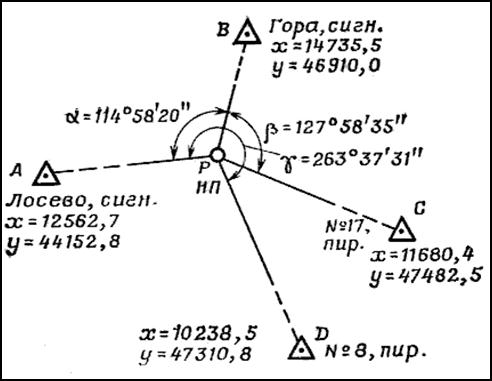
Рисунок 11 – Абрис оберненої засічки за виміряними кутами
Продовження додатка В
Обчислення зворотної засічки виконують за формулами, наведеними вище від точок А і В, а точку С використовують для контролю. Попередньо дирекційні кути (АР), (ВР) і (СР) змінюють на 1800.
Оберненою засічкою за виміряним кутом і відстанню називається спосіб визначення координат точки, що прив’язується, рис.12, за виміряним на цій точці кута Р між напрямками на два вихідних пункти А і В і відстані до цих пунктів  і
і  .
.

Рисунок 12 – Обернена засічка за виміряним кутом і відстанню
Застосування цього способу засічки найбільш вигідно у порівнянні з іншими видами засічок, оскільки вимагає мінімального терміну часу на польові роботи і обчислення. Вимірювання кута і двох відстаней виконується з однієї (що прив’язується) точки квантовим топографічним далекоміром (КТД-1).
Обчислення засічки виконується у такому порядку:
1 Визначають величини кутів А і В біля точок А і В відповідно:
tg (( A - B) / 2) = N ctg ( P /2), де N = ( -
-  ) / ( + ).
) / ( + ).
2 Формули виводяться у тій самій послідовності, що і під час зворотної засічки за виміряними кутами. Внаслідок цього:
A + B) / 2 = 900 - P /2;
A = ( A + B) / 2) + ( A - B) / 2); B = (( A + B) / 2) - (( A - B) / 2).
Контроль: f∆ = 1800 – (( A + B + Р).
Допустима величина f∆ не більше 3’.
За теоремою синусів розв’язуємо трикутник АВР і визначаємо сторону  потр.
потр.
3 Розв’язанням зворотної геодезичної задачі за координатами вихідних пунктів А і В знаходять дирекційний кут (АВ) і довжину лінії .
Контроль: ∆ = - потр.
Допустима величина ∆ не більше 20’.
4 Обчислюють дирекційні кути (АР) і (ВР):
(АР) = (АВ) + A; (ВР) = (ВА) - В.
5 Рішенням двох прямих геодезичних задач по напрямках АР і ВР двічі обчислюють координати точки Р. За остаточні координати беруться координати середнього значення із двох результатів.
Комбінована засічка. Комбінованою засічкою називається спосіб визначення координат, коли вимірювання виконуються на одному з вихідних пунктів і на точці, що прив’язується.
Продовження додатка В
Розрізняють такі види комбінованої засічки: за виміряними кутами; завиміряними кутами і відстанями.
Під час комбінованої засічки за виміряними кутами координати точки, що прив’язується, визначають вимірюванням кутів на цій точці і на одному з трьох вихідних пунктів, рис.13.
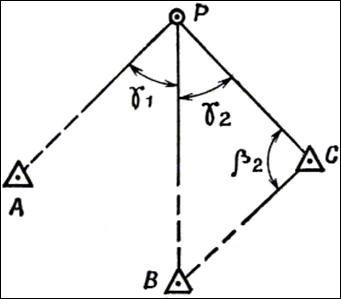
Рисунок 13 – Комбінована засічка за виміряними кутами
Дирекційний кут (СВ) визначають розв’язанням оберненої геодезичної задачі, а дирекційні кути (АР), (ВР) і (СР) – використовуючи кути, які виміряні на точці Р і вихідному пункті С:
(СР) = (СВ) + β2;
(ВР) = (СР) + γ2;
(АР) = (СР) + (γ1 + γ2).
За умови комбінованої засічки за виміряними кутами і відстанями вимірюють кути на точці, що прив’язується, і на одному із двох вихідних пунктів, а також відстань між точкою, що прив’язується, і одним із вихідних пунктів, рис.14. Засічку виконують за допомогою КТД-1.
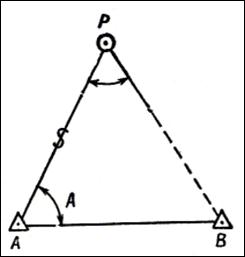
Рисунок 14 – Комбінована засічка за виміряними кутами і відстанями
Продовження додатка В
Обчислення проводять у такому порядку.
1 Розв’язанням оберненої геодезичної задачі знаходять дирекційний кут (АВ) і відстань .
2 Із рішення трикутника АВР за кутами А і Р і стороною визначають кут В і сторони і потр. Проміжним контролем рішення засічки є збіг значень сторони , отриманих із рішення трикутника АВР і оберненої геодезичної задачі. Під час рішення засічки за таблицями логарифмів значення логарифма сторони не повинні відрізнятися більше ніж на 60 одиниць п’ятизначного логарифма. Якщо засічка вирішується за допомогою ЕКОМ, то розбіжність в стороні не повинна перевищувати 3 м, а під час рішення за допомогою обчислювача ОТМ – 10 м.
3 Обчислюють дирекційні кути (АР) і (ВР).
4 Розв’язанням прямих геодезичних задач знаходять координати точки Р з пунктів А і В.
Засічка вважається виконаною правильно, якщо розбіжність у координатах точки Р, яка отримана з пунктів А і В, не перевищує 20 м. За кінцевий результат беруть середнє значення координат, яке округлено до 1 м.
Розглянуті варіанти засічок не включають всіх можливих випадків взаємного розташування вихідних пунктів точки, що визначається, і умов видимості між ними. Можливі й інші комбінації, але завжди під час вибору способу і виду засічки необхідно прагнути до можливого скорочення часу на виконання польових і обчислювальних робіт.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1976; Нарушение авторских прав?; Мы поможем в написании вашей работы!