КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция №4. Математическое описание процессов преобразования энергии
|
|
|
|
Цель лекции:
- ознакомить студентов ссистемой уравнений, описывающих процессы электромеханического преобразования энергии, дифференциальными уравнениями, описывающих переходные и установившиеся процессы в обобщенной машине, моделью обобщенного электромеханического преобразователя.
Содержание лекции:
- система уравнений, описывающих процессы электромеханического преобразования энергии;
- дифференциальные уравнения, описывающие переходные и установившиеся процессы в обобщенной машине;
- модель обобщенного электромеханического преобразователя.
Математическая модель электрической машины — это система уравнений, описывающих процессы электромеханического преобразования энергии с допущениями, обеспечивающими необходимую точность решения для рассматриваемой задачи. Математические модели электрических машин широко используются для исследования электромеханических систем благодаря применению аналоговых и цифровых вычислительных машин. В настоящее время созданы модели, позволяющие исследовать практически любые задачи, встречающиеся в электромашиностроении.
Несмотря на бесконечное конструктивное разнообразие индуктивных электрических машин все электрические машины с круговым полем в воздушном зазоре можно свести к обобщенной электрической машине. Обобщенная электрическая машина — это идеализированная двухполюсная машина с двумя парами обмоток на статоре и роторе. В ней энергия магнитного поля сосредоточена в воздушном зазоре и поле синусоидальное. В воздушном зазоре обобщенной машины вращающееся магнитное поле может создаваться обмотками статора и ротора. Напряжения статора или ротора создают сдвинутые во времени токи, а за счет пространственного сдвига обмоток в зазоре создается вращающееся поле.
Машины постоянного тока получаются из модели обобщенной электрической машины, если обмотки ротора или статора питать через преобразователь частоты.
В машинах постоянного тока преобразователем частоты является механический преобразователь частоты — коллектор. Постоянный ток преобразуется в многофазный переменный ток, который создает вращающееся поле, неподвижное относительно обмотки возбуждения, расположенной на статоре.
Как в машинах переменного, так и в машинах постоянного тока много фазная симметричная обмотка приводится к двухфазной, которая и рассматривается в обобщенной электрической машине. Процессы преобразования энергии в многополюсных машинах приводятся к процессам в двухполюсной машине.
Уравнения обобщенной электрической машины были предложены Г. Кроном в 30-х годах, и в последние десятилетия теория обобщенной машины получила дальнейшее развитие в работах советских и зарубежных ученых.
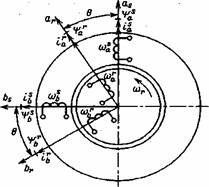
Рисунок 4.1 - Модель двухфазной машины в непреобразованной системе координат
Дифференциальные уравнения, описывающие переходные и установившиеся процессы в обобщенной машине в естественных или фазовых непреобразованных координатах (см. рисунок 4.1), имеют вид
uas=iasras+dψas /dt; 
ubs=iasras+dψas /dt; (4.1)
- uas=iasras+dψas /dt;
- ubs=iasras+dψas /dt.
В (4.1) потокосцепления обмоток
Ψas= Lasia s+ M(cos Ө)iar + M (sinӨ) ibr;
Ψas= Lbsibs + M(cos Ө)ibr – M (sinӨ)iar; (4.2)
Ψar= Laria r+ M(cos Ө)ias - M (sinӨ) ibs;
Ψar= Lbribsr+ M(cos Ө)ibs + M (sinӨ)ias.
В (4.1) и (4.2) uas, ubs, uar, ubr - напряжения на обмотках статора и ротора; ias, ibs, ir, ibr — токи в обмотках статора и ротора; ras, rbs, rr, rbr — активные сопротивления обмоток статора и ротора; Las, Lbs, Lr, Lbr — индуктивности обмоток статора и ротора; М — взаимная индуктивность между обмотками статора и ротора; Ө — угол между осями обмоток статора и ротора.
Если подставить (4.2) в (4.1), получатся громоздкие уравнения с периодическими коэффициентами. Для упрощения уравнений электромеханического преобразования энергии рассматривается псевдонеподвижная машина, в которой в обмотки ротора вводится ЭДС вращения. При этом в неподвижной и вращающейся машинах токи, активная и реактивные мощности остаются неизменными.
В неподвижной системе координат α, δ уравнения обобщенной машины, выраженные через потокосцепления, выглядят следующим образом:
uαs = iαs rαs +  ;
;
uβs = iβs rβs +  ; (4.3)
; (4.3)
uαs = iαs rαs + + ωrψβr;
uβs = iβs rβs + - ωrψαr. (4.4)
Подставляя в (4.4) значения потокосцеплений
(4.3)
ψαs = Lαsiαs + Miαr;
ψβs = Lβsi βs + Miβr; (4.5)
ψαr = Lαriαr + Miαs;
ψβr = Lβri βr + Miβs;
получаем выраженные через токи уравнения напряжений для машины, которые удобно записывать в матричной форме:
| uαs |   0 0 0 0
| iαs | |||
| uαr uβr | = |  Lβrωr Mωr
- Mωr -Lαrωr Lβrωr Mωr
- Mωr -Lαrωr 
| X | iαr iβr | |
| uβs | 0 0 
| iβs |
В (4.1)-(4.5) uαs, uβs, uαr, uβr, iαs, iβs, iαr, iβr, - соответственно напряжения и токи в обмотках статора и ротора по осям α и β; rαs, rβs, rαr, rβr, — активные сопротивления обмоток статора и ротора; М — взаимная индуктивность; Lαs, Lβs, Lαr, Lβr, — полные индуктивности обмоток статора и ротора по осям α и β; ωr — угловая скорость ротора.
Индуктивности обмоток определяются по известным соотношениям
Lαs =M +lαs; Lβs =M +lβs
где lαs, lβs, lαr, lβr — индуктивности рассеяния обмоток статора и ротора по осям α и β.
Активные сопротивления и индуктивности в (4.4) относятся к фазе машины и определяются расчетным и опытным путем.
Применяя преобразования координат при инвариантной мощности, получают уравнения в других координатах.
Процессы преобразования энергии в переходных процессах описываются уравнениями напряжений (4.1) или (4.2) и уравнением движения
Mэ =  (4.6)
(4.6)
где Мэ — электромагнитный вращающий момент — момент, создаваемый машиной; Мс — момент сопротивления с учетом момента трения; р — число пар полюсов; J — момент инерции.
Вращающий момент
Мэ  , (4.7)
, (4.7)
где m — число фаз.
Вращающий момент может быть выражен:
через потокосцепления (4.5)
Мэ =  , (4.8)
, (4.8)
через потокосцепления и токи статора:
Мэ =  , (4.9)
, (4.9)
через потокосцепления и токи ротора:
Мэ =  . (4.10)
. (4.10)
Справедливость (4.8) - (4.10) подтверждается, если в (4.9) подставить значения потокосцеплений и токов из (4.2). Вращающий момент после преобразований (4.9) - (4.10) может иметь и другой вид. Вращающий момент можно определить также через намагничивающие токи и через изменение энергии магнитного поля или из выражения вектора Пойнтинга.
При круговом поле в воздушном зазоре наращивание сложности уравнений происходит при учете нелинейностей параметров и учете нескольких контуров на статоре и роторе.
Уравнения электромеханического преобразования энергии усложняются при наличии двух полей в воздушном зазоре машины. При эллиптическом поле система уравнений электромеханического преобразования энергии состоит из восьми уравнений напряжения и уравнения электромагнитного момента с четырьмя парами произведений токов в обмотках статора и ротора. Число уравнений увеличивается при учете контуров с токами на статоре и роторе. Учет нескольких полей и контуров на статоре и роторе приводит к системе с несколькими десятками уравнений. Наиболее простая система уравнений — система уравнений третьего порядка — получается, если использовать описание процессов преобразования энергии через обобщенные векторы
U=  ; (4.11)
; (4.11)
U= - jωrψr.
Система уравнений (4.11) и уравнение движения (4.6) описывают динамические и статические характеристики электрической машины.
Уравнения установившегося режима получаются из дифференциальных уравнений путем замены в уравнениях электромеханического преобразования энергии оператора дифференцирования
d/dt ↔jω
В установившемся режиме уравнения напряжений и уравнение движения могут рассматриваться независимо друг от друга. Простейшие уравнения в установившемся режиме получаются из схем замещения электрических машин и упрощенных уравнений, на базе которых строятся векторные диаграммы. Круговое поле в воздушном зазоре может быть только в идеализированной машине. В воздушном зазоре реальной электрической машины имеется бесконечный произвольный спектр гармоник поля, состоящий из временных и пространственных гармоник. Высшие гармоники в воздушном зазоре машины появляются за счет несинусоидальности напряжений, несинусоидального распределения МДС, неравномерности зазора, насыщения и других причин.
|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 1376; Нарушение авторских прав?; Мы поможем в написании вашей работы!