КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Магнитный трекер для целеуказания
|
|
|
|
Коллективное использование многофункциональных датчиков.
Темы рефератов
1. Использование волоконно-оптических датчиков для определения положения предмета в пространстве.
2. Использование волоконно-оптических датчиков для измерения радиации.
3. Использование волоконно-оптических датчиков для измерения сверхвысоких напряжений.
4. Волоконно-оптические датчики в промышленности.
5. Волоконно-оптические датчики в экологии и безопасности жизнедеятельности.
6. Создание новых видов оптических волокон, используемых в датчиках.
7. Интеллектуальные волоконно-оптические датчики.
8. Современная оптоэлектроника.
9. Тенденции развития и совершенствования интеллектуальных датчиков.
10. Интеллектуальные датчики в системах искусственного интеллекта.
11. Базы данных и базы знаний в интеллектуальных датчиках.
12. Надежность программного обеспечения интеллектуальных датчиков.
Магнитный трекер является примером коллективных действий трех видов: генерирования, измерения и вычисления.
Активное магнитное позиционирование решает задачу определения линейного положения, и ориентации подвижного объекта в реальном времени.
Технология включает генерирование магнитного поля с известным пространственным распределением в зоне перемещения подвижного объекта, измерение компонент генерирующего поля с подвижным приемником, жестко связанным с подвижным объектом, вычисление координат подвижного объекта, путем сравнения измеренных значений компонент поля с вычисленными для предполагаемых координат с уточнением этих координат итерационной процедурой.
Фактически устройство магнитного позиционирования является информационно-измерительным устройством. Впервые оно было создано в США и названо «трекером».
Трекер (от английского Tracker) - это устройство позиционирования, представляющее собой прецизионную измерительно-вычислительную систему реального времени, служащую для нахождения шести координат подвижного объекта - трех линейных и трех угловых. Технология магнитного позиционирования достаточно сложная и наукоемкая.
Из трех известных способов магнитного позиционирования - два зарубежных: АС - позиционирование (alternating current) и DC - позиционирование (direct current), а так же отечественный способ, предложенный М.В. Желамским. АС - позиционирование и DC - позиционирование отличаются характером генерируемого магнитного поля. АС - метод построен на одновременном и непрерывном генерировании трех синусоидальных полей на разных частотах. DC - метод предполагает генерирование последовательности импульсных полей разной ориентации. Этот метод свободен от действия вихревых токов в окружающем интерьере, которые наводятся синусоидальным полем и ограничивают точность позиционирования.
|
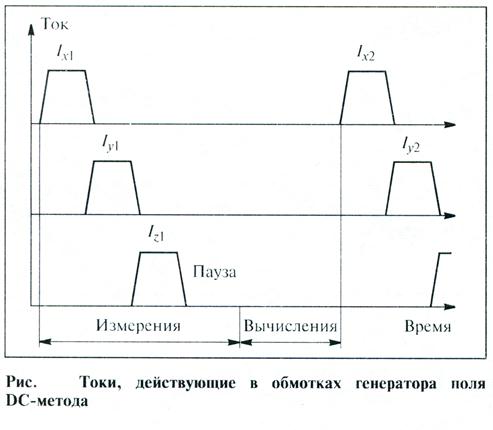
На рис. (5.1) показано изменение токов, возбуждающих три ортогональные обмотки генератора импульсного магнитного поля. Видна пауза, когда все обмотки обесточены. Пауза необходима для измерения проекции магнитного поля Земли на подвижный приемник, которое векторно складывается с генерируемым рабочим полем, и последующей компенсации его влияния. Подвижный приемник содержит, как правило, три ортогональных измерителя индукции магнитного поля, которые выполняют измерения на вершине каждого импульса и во время паузы токов. Таким образом, за период работы системы набирается 12 измерений которые поступают в вычислитель, для определения координат подвижного приемника, за специально предусмотренное время. Система работает в дискретно- периодическом режиме с фиксированной частотой замены выходных данных.
|
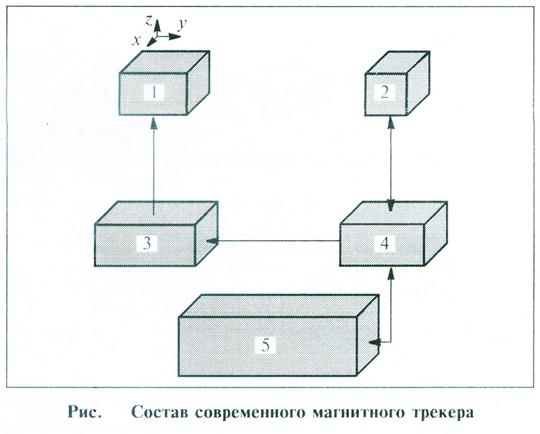
На рис (5.2) приведена общая для всех методов схема магнитного трекера. Активная система магнитного позиционирования включает фиксированный генератор магнитного поля 1 (ГМП) и подвижный приемник 2 (УИП), закрепленный на подвижном объекте. ГМП служит для генерирования магнитного поля с известным пространственным распределением в зоне перемещения подвижного объекта. УИП минимального веса и объема устанавливается на подвижном объекте. Контроллер 3 управляет формой, амплитудой и частотой следования импульсов тока через обмотки ГМП. Интерфейс 4 предназначен для ввода аналоговой информации в вычислитель, и выдачи цифровых управляющих сигналов. Вычислитель 5 решает три математические задачи позиционирования - измерение, управление, вычисление координат.
|
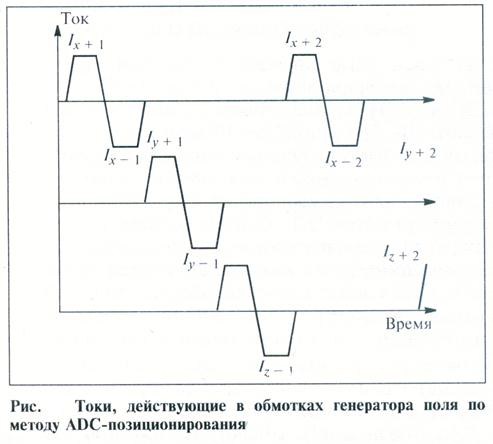
В способе, предложенном М.В.Желамским, обмотки генератора магнитного поля возбуждаются знакопеременными импульсами тока с плоскими вершинами, как показано на рис. (5.3) По аналогии с АС и DC способами, этот способ можно назвать «ADC - позиционирование», от английских слов «altermating-direct-current».
Из графиков токов, приведенных на рис. (5.3), видно, что пауза токов исключена, а компенсация магнитного поля Земли возможна после каждого переключения ориентации генерируемого магнитного поля, что в сравнении с зарубежными аналогами создает следующие технические преимущества:
- более высокую помехозащищенность магнитных измерений к внешним полям, вследствие лучшей компенсации влияния мешающих воздействий;
- меньшую величину динамической погрешности позиционирования, за счет более точных разностных магнитных измерений;
- более высокую частоту смены выходной информации благодаря тому, что математическая задача решается после каждого переключения ориентации генерируемого магнитного поля;
- более высокую точность позиционирования в дальней зоне по причине удвоения разностной амплитуды измеряемого поля.
Трекеры имеют различные практические реализации:
- медицинские реабилитирующие технологии, например пациентам, перенесшим инсульт, предлагается тренировать двигательную активность путем отслеживания предметов, движущихся по экрану специального монитора;
- дискретное управление взглядом по заранее определенным целям;
- промышленные работы;
- транспортные средства и тренажеры;
- сканирование скрытых поверхностей;
- дальнее позиционирование в строительстве.
Коллективные совместные работы весьма перспективны для современных химических и биологических лабораторий. Для трекеров имеются алгоритмы и базовое программно-техническое обеспечение, дающее устойчивое и однозначное решение задач позиционирования в реальном времени; определены методы калибровки и адаптации устройств к окружающему пространству.
Очевидно, что химические и биологические экспресс лаборатории будущего уменьшатся до очень малых размеров (в литературе их называют лабораториями на чипе). Это позволит сделать анализы химических и биологических объектов более быстрыми и точными. Принцип действия лаборатории на чипе состоит в том, что она сортирует вещества с помощью ряда каналов диаметром в несколько десятков нанометров. На основе таких лабораторий можно создать простые эффективные и быстродействующие анализаторы крови.
Характерным примером коллективного использования многофункциональных датчиков является так называемый «Электронный нос». Это новый тип искусственных анатомических систем. В таких системах имеются определенные наборы высокочувствительных сенсоров и средства вычислительной техники, обеспечивающие в реальном времени обработку многопараметрической информации.
Работы по определению запахов с помощью датчиков велись сравнительно давно с 50-х годов ХХ века. В 80-ые годы были достигнутые определенные успехи при детектировании запахов с помощью линеек сенсоров. В настоящее время имеется много газовых сенсоров, используемых в системах «Электронный нос». Требования к таким сенсорам: технологичность в изготовлении, надежность в работе, возможность длительного мониторинга объектов (часы, дни, недели, месяцы).
Фундаментальным для «Электронного носа» является представление о том, что каждый сенсор в матрице первичных приемников должен характеризоваться различными порциальными чувствительностями по отношению к пространству анализируемых запахов. Каждый сенсор в сенсорной матрице или линейке имеет свой характерный профиль откликов всех в ответ на предъявление спектра тестируемых запахов.
Результирующая картина откликов всех сенсоров сложна и определяется микропроцессорными устройствами с использованием специальных программ.
В недалеком будущем «Электронный нос» заменит специально обученных людей (дегустаторов, парфюмеров), которые не свободны от элементарных человеческих недостатков, влияющих на остроту обоняния: усталости, различных инфекций, токсических веществ, плохого физического состояния, субъективности в оценке восприятия и т. д.
«Электронный нос» может создать воспроизводимый образ запахов, превосходящий по своим идентификационным параметрам как возможности человеческого носа, так и современной аналитической аппаратуры. Как правило, «Электронный нос» состоит из трех функциональных узлов: системного проботбора и пробоподготовки, линейки или матрицы сенсоров с заданными свойствами и блока процессорной обработки сигналов матрицы сенсоров.
По принципу функционирования, известные сенсоры могут быть разделены на несколько основных категорий основанных на измерении: проводимости, прироста массы, характеристик поверхностных акустических волн и оптических параметров. К таким сенсорам относятся: металлооксидные, полимерные проводящие, кварцевые кристаллические микровесы (ККМ), сенсоры на поверхностных волнах (ПАВ-сенсоры), сенсоры на основе металл-окисных каталитических полевых транзисторов (МОКПТ), оптоволоконные сенсоры.
Принцип действия металлооксидных сенсоров основан на изменении проводимости ряда широкозонных полупроводников на основе оксидов олова, цинка, титана, вольфрама, индия и иридия, легированных металлами с каталитическими свойствами (палладий, платина) при повышенной температуре в присутствии анализируемых газов.
В составе сенсора полупроводниковый материал, взаимодействующий с молекулами пахучего вещества, располагается между двумя металлическими контактами поверх резистивного элемента, обеспечивающего рабочую температуру сенсора в диапазоне 200-400  . На одной стороне подложки из сапфира расположен тонкий платиновый нагреватель, а на другой – чувствительные полупроводниковые элементы и электроды. Малый температурный градиент между нагревателем и чувствительными слоями позволяет с высокой точностью поддерживать постоянную рабочую температуру путем стабилизации сопротивления нагревателя.
. На одной стороне подложки из сапфира расположен тонкий платиновый нагреватель, а на другой – чувствительные полупроводниковые элементы и электроды. Малый температурный градиент между нагревателем и чувствительными слоями позволяет с высокой точностью поддерживать постоянную рабочую температуру путем стабилизации сопротивления нагревателя.
Задача легирования оксидных материалов – достижение максимально достижимой специфичности по отношению к компонентам газовых смесей. Возможность повышения селективности дает правильный выбор операционной температуры.
В полимерных проводящих сенсорах в качестве активных материалов используются проводящие органические полимеры из класса полипирралов, тиофенолов, индолов или фуранов.
При экспонировании таких полимеров в парах пахучих веществ могут образовываться различные типы связей (ионные ассоциаты, комплексы с переносом заряда и др.), меняющие природу электронных уровней. Это отражается на эффективности переноса электрона по полимерной цепи, что приводит к изменению ее проводимости. Влияние тех или иных веществ на полимерную проводимость определяется выбранным для измерений противоионом, а также функциональными группами, с помощью которых модифицирован материал полимера-основы. В соответствии с диффузионным характером распространения молекул пахучего вещества в чувствительном слое время отклика полимерного сенсора пропорционально толщине активной зоны полимера. Для его снижения идут по пути уменьшения размера зоны до микронного размера.
Пьезоэелектрические сенсоры для измерений приращения массы делят на два типа: кварцевые кристаллические микровесы (ККМ) и сенсоры на поверхностных акустических волнах (ПАВ).
ККМ сенсор представляет собой кварцевый резонаторный диск диаметром в несколько миллиметров с металлическими электродами с обеих сторон. При воздействии переменным током кристалл возбуждается на собственной резонансной частоте, (например, 10 МГц или 30 МГц), определяемый, в основном, массой. В соответствии с установленной зависимостью изменение резонаторной частоты от приращения массы составляет:  , где ΔF-сдвиг частоты (Гц); F-резонансная частота пьезокристала(МГц),
, где ΔF-сдвиг частоты (Гц); F-резонансная частота пьезокристала(МГц),  -прирост массы кристалла (г.) за счет адсорбции пахнущих веществ, А-площадь активной зоны кристалла (см2).
-прирост массы кристалла (г.) за счет адсорбции пахнущих веществ, А-площадь активной зоны кристалла (см2).
При экспозиции сенсоров в парах пахучих веществ последние адсорбируются на поверхности полимерного покрытия. Последующая экспозиция кристалла в газе, не содержащем молекул пахучего вещества, возвращает резонансную частоту к первоначальному уровню.
ПАВ-сенсоры очень похожи на ККМ-сенсоры. ПАВ оперируют при значительно более высоких, чем ККМ частотах (сотни МГц). При этом ПАВ могут генерировать значительно большие изменения частоты регистрируемого сигнала.
В основу работы чувствительных к запахам металл-оксид-кремниевых полевых транзисторов (МОКПТ) положены химические реакции летучих органических соединений в активной зоне сенсора, ускоряемые каталитически активными металлами. Подвижные продукты реакции, диффундируя через затвор МОКПТ, изменяют электрические параметры транзистора, что и приводит к возникновению усиленного аналитического сигнала. Типичная МОКПТ-структура включает полупроводниковую структуру р-типа с двумя n-легированными областями и металлическими контактами. Использование МОКПТ-сенсорных устройств пока ограничивается лабораторными исследованиями.
Оптические волоконные сенсоры используют в качестве чувствительных элементов стеклянные микроволокна, покрытые химически активным материалом по торцу или боковой поверхности. Химически активный материал создается на основе специально подобранных или синтезированных флюоресцентных красителей, иммобилизованных в полимерной матрице. Луч света, распространяясь вдоль оптического волокна, производит опрос химического покрытия. При взаимодействии с летучими компонентами запахов полярность окружения красителей меняется и они отвечают на стимул соответствующими изменениями в спектре флюоресценции.
Разрешение линий возбуждающего света и флюоресцентного отклика сенсора обеспечивается либо чисто спектральными, либо спектрально-временными методами.
Основной задачей, решаемой «электронным носом» является идентификация запаха образца и, по возможности, установление концентрации пахучего вещества, что связано с обработкой данных и идентификацией многомерной картины сенсорных сигналов («образа запаха»). Как правило, задача решается в четыре последовательных стадии: предварительной обработки данных, выделения отличительных признаков, классификации и принятия решения.
В реферативном журнале «Автоматика и вычислительная техника» имеется много публикаций по датчикам запаха. Например [4]:
«В технологическом университете г. Токио предложена модель механизма чувствительности МДП-сенсоров к концентрации газов, согласно которой чувствительность изменяется благодаря захвату молекул газа, обладающих электрическими дипольными моментами, полярными ловушками, расположенными в области границы раздела «металл-диэлектрик». Модель удовлетворительно описывает экспериментальные результаты и подсказывает пути преодоления проблем, препятствующих применению МДП-сенсоров в качестве чувствительных элементов газоанализаторов.
Технологическим университетом г. Токио разработан датчик запахов, основу которого составляют чувствительные элементы, реагирующие на присутствие запахов а также волоконно-оптические и параметрические датчики для оценки среды-объекта анализа. Обработка данных с чувствительных элементов и датчиков осуществляется с помощью нейронных сетей.
Разработаны датчики для обнаружения и идентификации биологических веществ, вредных для дыхательной системы человека с помощью методов ИК спектроскопического анализа. Датчики основаны на принципе бионики.»
Контрольные вопросы
1. Дайте пояснение понятие «магнитный трекер».
2. Приведите примеры коллективного и индивидуального использования сенсоров.
3. Каковы перспективы «Электронного носа».
4. Каковы принципы работы датчиков газа.
5. Назовите способы магнитного позиционирования.
6. Расшифруйте понятие «лаборатория на чипе».
7. Какие работы могут совместно вести химические и биологические лаборатории.
8. Какие практические реализации имеют трекеры.
9. Из каких узлов состоит «Электронный нос».
10. Дайте расшифровку сокращениям: «ККМ», «ПАВ», «МоКПТ».
11. В чем состоит задача легирования оксидных материалов.
12. Поясните работу ККМ-сенсора.
Рекомендуемая литература
1.Желанский М.В. Первый отечественный магнитный трекер для целеуказания / М.В.Желанский // Датчики и системы – 2011 №1 – с.9÷16.
2. Николаев И.Н. Модель механизма чувствительности МДП-сенсоров к концентрации газов / И.Н. Николаев, А.В. Литвинов, Е.В. Емелин // Датчики и системы – 2006 №7 – с. 66÷73.
3. Благовещенский В.С. Коллективные, индивидуальные системы и элементы / В.С. Благовещенский, Е.Г. Эдуардов, С.А.Сергеев //Вестник ЧитГУ,№28, с. 113÷116.
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 823; Нарушение авторских прав?; Мы поможем в написании вашей работы!