КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Выбираем драйвер для управления шаговым двигателем
|
|
|
|
Выбираем шаговый двигатель.
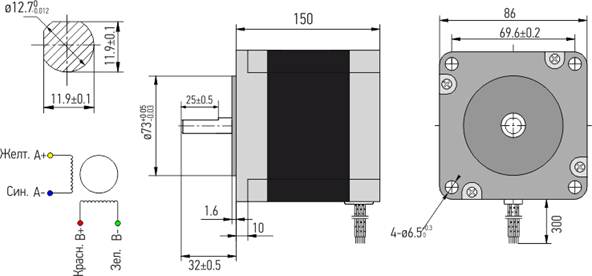
ДВИГАТЕЛЬ ШАГОВЫЙ ST86-150

Начало формы
МОЩНЫЙ ГИБРИДНЫЙ БИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ.
Модель ST86-150 обладает большим крутящим моментом. Сочетание большой мощности с малой индуктивностью позволяет использовать ST86-150 в приложениях, где требуется высокая динамика перемещений. Двигатели ST86-150 прекрасно зарекомендовали себя в раскроечных комплексах, станках плазменной и лазерной резки, широкоформатных гравировально-фрезерных станках с ЧПУ.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
| Момент удержания | 12.4 Нм (124 кг*см) |
| Ток обмотки | до 5.6 А |
| Сопротивление обмотки | 0.7 Ом |
| Индуктивность обмотки | 9.2 мГн |
| Шаг | 1.8 градуса |
| Точность позиционирования | 5% (± 15 угловых минут) |
| Длина двигателя | 150 мм |
| Число обмоток | 2 (4 вывода) |
| Температура окружающей среды | -10...+50 ºС |
| Температура двигателя | не более 82 ºС |
Сведения, необходимые для решения практической задачи - выбора подходящего драйвера:
Шаговый двигатель – двигатель со сложной схемой управления, которому требуется специальное электронное устройство – драйвер шагового двигателя. Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach3 или LinuxCNC.
Задача драйвера – изменять ток в обмотках как можно более эффективно, а поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т.п.
Драйверы делятся по способу закачки тока в обмотки на несколько видов:
1) Драйверы постоянного напряжения
Эти драйверы подают постоянный уровень напряжения поочередно на обмотки, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях – и от индуктивности. Эти драйверы крайне неэффективны, и могут быть использованы только на очень малых скоростях.
2) Двухуровневые драйверы
В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага.
3) Драйверы с ШИМ.
На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристки двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
|
|
|
|
|
Дата добавления: 2014-12-24; Просмотров: 895; Нарушение авторских прав?; Мы поможем в написании вашей работы!