КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные виды рабочих органов
|
|
|
|
Цель и задачи энерго-кинематического расчета привода
Целью энерго-кинематического расчета привода является обеспечение требуемых характеристик рабочего органа привода.
Для достижения этой цели необходимо решить следующие задачи:
‑ подобрать электродвигатель, способный преодолеть нагрузки, возникающие на рабочем органе;
‑ подобрать передаточные отношения для передач привода таким образом, чтобы обеспечить требуемые скорости и частоты вращения рабочего органа;
‑ определить энерго-кинематические параметры на валах привода, которые будут являться исходными данными к проектированию передач, составляющих привод.
Привод предназначен для приведения в действие рабочего органа. В качестве рабочего органа могут выступать барабаны грузоподъемных механизмов и ленточных конвейеров (рисунок 1, а), звездочки тяговых цепей цепных и скребковых конвейеров (рисунок 1, б), шнек винтовых конвейеров (рисунок 1, в) и др.
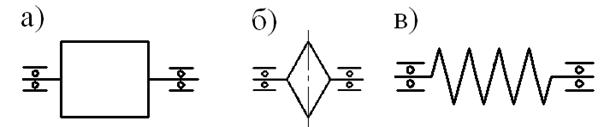
а – барабан; б – звездочка; в - шнек
Рисунок 1 – Виды рабочих органов
При работе механизмов для приведения в действие которых необходим рабочий орган на нем возникают нагрузки, которые привод должен преодолеть. В качестве таких нагрузок могут служить окружное усилие  , Н или крутящий момент
, Н или крутящий момент  .
.
Кроме того, рабочий орган должен обеспечивать движение тяговых канатов, лент, тросов, цепей исполнительного механизма с определенной линейной скоростью  или вращаться с определенной угловой скоростью
или вращаться с определенной угловой скоростью  .
.
Поэтому данные параметры рабочего органа будут являться исходными данными для энерго-кинематического расчета привода.
|
|
|
|
|
Дата добавления: 2014-12-25; Просмотров: 1044; Нарушение авторских прав?; Мы поможем в написании вашей работы!