КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
По угловым координатам
|
|
|
|
Системы автоматического сопровождения воздушных целей
Следующим большим классом систем радиоавтоматики являются радиотехнические системы автоматического сопровождения воздушных целей по угловым координатам. Часто их называют системами автоматического сопровождения целей по направлению (АСН). Существуют различные методы автосопровождения целей по направлению. Сущность одного из них заключается в следующем (рис. 3.42). Луч антенны (диаграмма направленности) сканирует в передней полусфере, формируя кадр, состоящий из совокупности строк (как при телевизионной развертке). После формирования очередного кадра луч возвращается в его начало, а затем формирует следующий кадр.
Рис. 3.42. Следящий радиолокационный кадр
Передатчик радиолокатора излучает периодическую последовательность зондирующих импульсов, которые, отражаясь от цели, поступают в приемник РЛС с некоторым запаздыванием  (как и в системе АСД). В течение времени взаимодействия зондирующих импульсов с целью (пока луч скользит по цели) от последней успевает отразиться лишь некоторое конечное число импульсов (пачка импульсов). Положение этой пачки во времени относительно начала строки и начала кадра пропорционально угловым координатам цели
(как и в системе АСД). В течение времени взаимодействия зондирующих импульсов с целью (пока луч скользит по цели) от последней успевает отразиться лишь некоторое конечное число импульсов (пачка импульсов). Положение этой пачки во времени относительно начала строки и начала кадра пропорционально угловым координатам цели  и
и  . Если теперь растянуть импульсы в пачке (чтобы получить один сплошной импульс) и сформировать два строба (рис. 3.43), как в системе автоматического сопровождения целей по дальности АСД, то по тому же принципу, как и в АСД, можно реализовать автосопровождение цели по координатам и . В этом случае весь кадр будет сопровождать цель (перемещаться вместе с целью).
. Если теперь растянуть импульсы в пачке (чтобы получить один сплошной импульс) и сформировать два строба (рис. 3.43), как в системе автоматического сопровождения целей по дальности АСД, то по тому же принципу, как и в АСД, можно реализовать автосопровождение цели по координатам и . В этом случае весь кадр будет сопровождать цель (перемещаться вместе с целью).
Рис. 3.43. Пачка импульсов и стробы при сопровождении по угловым координатам
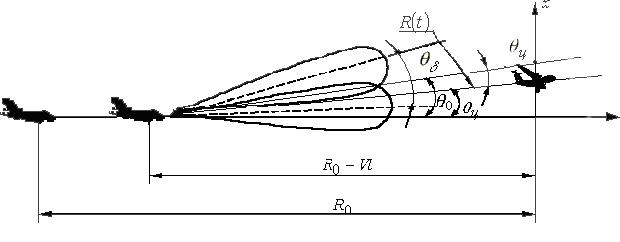
Другой метод заключается в формировании равносигнального направления (зоны) РСЗ (рис. 3.44).
Рис. 3.44. Метод РСЗ
Равносигнальное направление можно сформировать либо переключением во времени двух диаграмм направленности (лучей), либо коническим сканированием (вращением) диаграммой направленности, максимум которой смещен относительно оси антенны, либо “окрашивая” две диаграммы направленности в соответствующей плоскости путем излучения по каждой из них сигналов различных частот. Обозначим координаты равносигнального направления  , а координаты направления на цель –
, а координаты направления на цель –  .
.
Слежение за целью осуществляется следующим образом. На выходе углового дискриминатора, основным элементом которого является антенна, формируются сигналы, пропорциональные разности угловых координат  . Эти сигналы затем так управляют лучами, чтобы
. Эти сигналы затем так управляют лучами, чтобы  . Управляющие сигналы могут либо преобразовываться в механические повороты антенны (посредством УПУ), либо управлять электронным сканированием. В последнее время операции слежения все чаще осуществляются в компьютерах на программно-алгоритмическом уровне цифровой обработки сигналов. В рассмотренных системах управления объектом управления ОУ является антенна (рис. 3.45).
. Управляющие сигналы могут либо преобразовываться в механические повороты антенны (посредством УПУ), либо управлять электронным сканированием. В последнее время операции слежения все чаще осуществляются в компьютерах на программно-алгоритмическом уровне цифровой обработки сигналов. В рассмотренных системах управления объектом управления ОУ является антенна (рис. 3.45).
Рис. 3.45. Система управления антенной
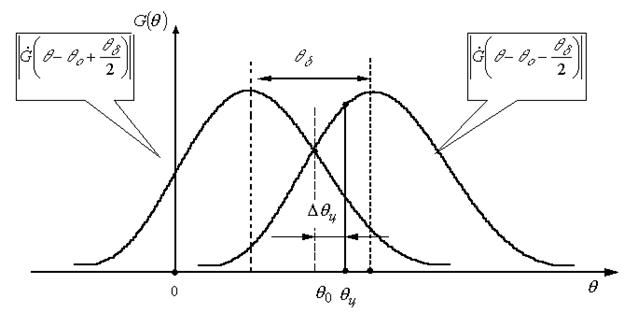
Широкое применение имеют моноимпульсные системы пеленгации сопровождения целей. Остановимся на них более подробно. Принципы действия большинства классических моноимпульсных систем основаны на амплитудном, фазовом и комбинированном сравнении одиночных принятых импульсов (моноимпульсов) [10, 11] для извлечения информации об угловом положении цели. Как правило, эти системы являются составной частью следящих систем сопровождения целей или систем самонаведения. Это системы сопровождения и оценок угловых координат воздушных целей, системы сопровождения ИСЗ, системы наведения и сопровождения ракет, самолетов-истребителей (рис. 3.46) и др.
 а
а
б
Рис. 3.46. ДН двух лучей в плоскости  :
:
а – в декартовой системе координат; б – в полярной системе координат
Среди всех имеющихся моноимпульсных систем наибольшее распространение получили суммарно-разностные системы с амплитудным, фазовым и комбинированным сравнением сигналов. Основным достоинством суммарно-разностных систем является значительно меньшее влияние на точность измерений координат изменяющейся амплитуды и начальной фазы принимаемых сигналов.
|
|
|
|
|
Дата добавления: 2014-12-26; Просмотров: 3307; Нарушение авторских прав?; Мы поможем в написании вашей работы!