КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Протокол №9 от 9 марта 2003 2 страница
|
|
|
|
1 Первые два знака 4А в обозначении означают номер серии и асинхронный тип двигателя. Последние два знака УЗ означают, что двигатели предназначены для районов с умеренным климатом и работы в закрытых помещениях с естественной вентиляцией (3-я категория размещения).
2 Буква А после первых двух знаков означает, что станина и щиты из алюминия; отсутствие буквы – станина и щиты чугунные или стальные. Далее располагается двух- или трехзначное число, обозначающее высоту от оси вращения в миллиметрах. После высоты оси вращения идут буквы L,M и S, характеризующие установочные размеры по длине станины, или буквы А и В, определяющие длину сердечника статора. Цифры 2,4,6,8 означают число полюсов.
Электродвигатели 4АР с повышенным пусковым моментом по ГОСТ 20818-75 применяют для привода машин, имеющих значительную пусковую нагрузку (например, в приводах конвейеров, глиномялок, компрессоров, плунжерных насосов и других машин с повышенным трением или значительными инерционными нагрузками).
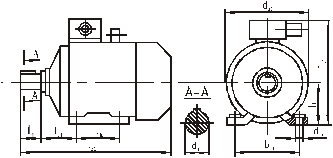
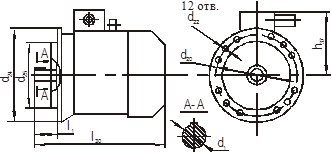
Расшифровка полного обозначения типоразмеров двигателей серии 4А приведена в табл. 2. В табл. 3…, 4, 5 даны основные размеры и масса электродвигателей (рис. 1).
| |||
| Исполнение 1М 1081 | |||
| |||
| Исполнение 1М 2081 | |||

| |||
| Исполнение 1М 3081 Рисунок 1 – Электродвигатели серии 4А | |||
| Таблица 3– Основные размеры и масса электродвигателей серии 4А (исполнение 1М 1081) | 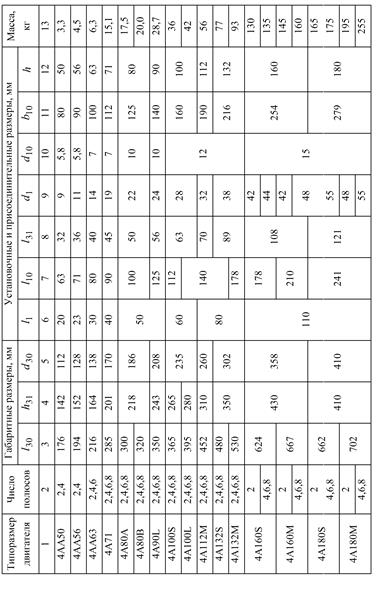
| ||
Продолжение таблицы 3
| Таблица 4– Основные размеры и масса электродвигателя серии 4А (исполнение 1М2081) | 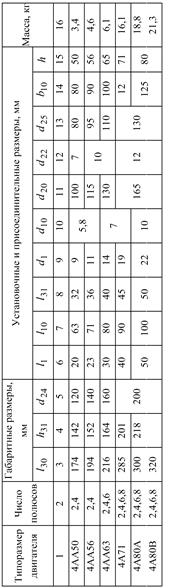
|
| Продолжение таблицы 4 | 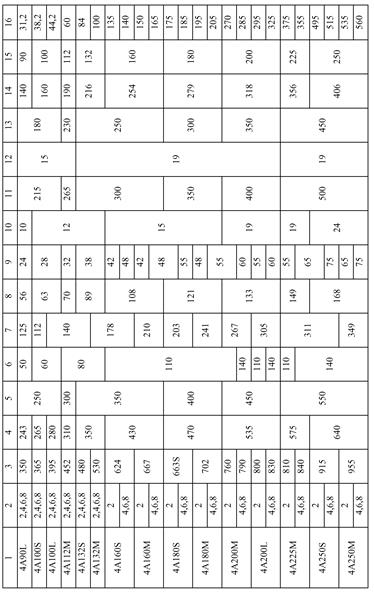
|
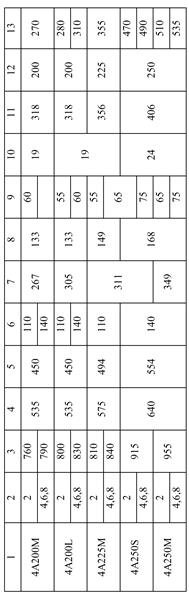
| Таблица 5– Основные размеры и масса электродвигателя 4А (исполнение 1М 3081) | 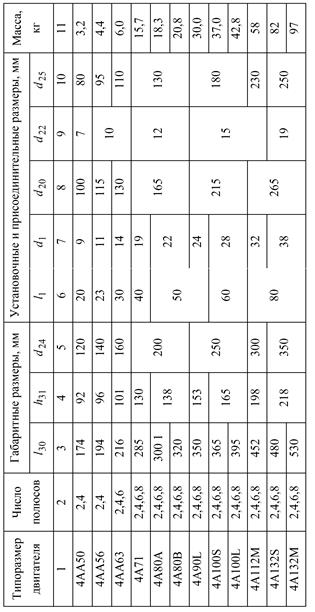
|
| Продолжение таблицы 5 | 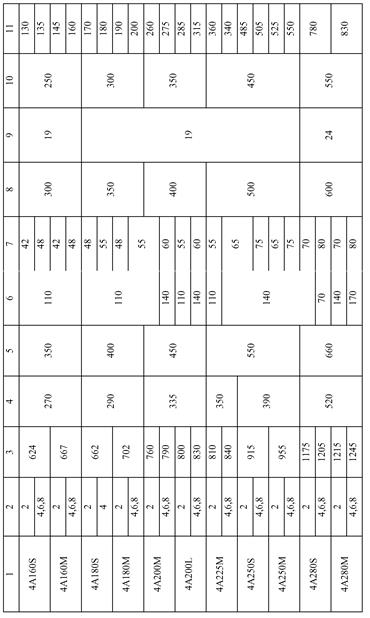
|
1.4 Выбор электродвигателя
При выборе электродвигателя кроме синхронной частоты вращения и потребной мощности необходимо определиться с его исполнением, выбор которого зависит от типа и конструкции редуктора или коробки скоростей и условий компоновки привода.
Исходными данными на этом этапе проектирования привода служат: принципиальная схема привода (с указанием типов всех передач, входящих в его состав); вращающий момент на выходном валу редуктора (коробки скоростей)  ; частота вращения выходного вала
; частота вращения выходного вала  ; синхронная частота электродвигателя
; синхронная частота электродвигателя  . Расчет потребной мощности привода
. Расчет потребной мощности привода  , выполняется по заданной нагрузке на выходном валу и частоте вращения выходного вала с учетом потерь мощности в приводе от вала электродвигателя до выходного вала редуктора:
, выполняется по заданной нагрузке на выходном валу и частоте вращения выходного вала с учетом потерь мощности в приводе от вала электродвигателя до выходного вала редуктора:
 , (1)
, (1)
где  - общий КПД привода, учитывающий потери мощности на отдельных звеньях кинематической цепи привода,
- общий КПД привода, учитывающий потери мощности на отдельных звеньях кинематической цепи привода,
 , (2)
, (2)
где  – КПД звеньев кинематической цепи привода, ориентировочные значения которых приведены в табл.6.
– КПД звеньев кинематической цепи привода, ориентировочные значения которых приведены в табл.6.
Таблица 6 – Коэффициенты полезного действия различных механических передач
| Вид передачи | КПД передач | ||||
| закрытых | открытых | ||||
| Зубчатая цилиндрическая | 0,96…0,98 | 0,93...0,95 | |||
| Зубчатая коническая | 0,95…0,97 | 0,92...0,94 | |||
| Червячная при числе заходов червяка: | |||||
| 0,65...0,70 | 0,50...0,60 | ||||
| 0,70...0,70 | 0,60...0,70 | ||||
| 0,85...0,90 | ____ | ||||
| Цепная | 0,95...0,97 | 0,90.. 0,93 | |||
| Фрикционная | 0,90...0,96 | 0,70... 0,88 | |||
| Ременная | 0,94…0,97 | ||||
| Пара подшипников качения | 0,99…0,995 | ||||
| Пара подшипников скольжения | 0,98…0,99 | ||||
Для проектного расчета КПД червячной передачи можно принять приближенно:
 .
.
По результатам расчетов - потребной мощности и синхронной частоте из табл. 2 подбирается электродвигатель со стандартной ближайшей мощностью. Перегрузка асинхронных двигателей допускается до 8%. При невыполнении этого условия следует брать двигатель большей ближайшей мощности. Для выбранного электродвигателя необходимо выписать из табл. 2…,3,4,5 следующие основные характеристики, которые представлены в табл. 7.
Таблица 7 – Параметры электродвигателя
| Типоразмер двигателя | Мощность 
| Синхронная частота nc, мин-1 | Рабочая частота nэд, мин-1 | Отношение максимального момента к номинальному Тmax/Tном | Диаметр вала электродвигателя dв, мм |
Расчет потребной мощности электродвигателя в приводах с коробками скоростей производится по той же схеме.
1.5 Кинематический расчет привода
Исходными данными при выполнении кинематического расчета кроме заданной кинематической схемы привода являются синхронная частота вращения вала электродвигателя  и частота вращения выходного вала
и частота вращения выходного вала  редуктора или коробки скоростей.
редуктора или коробки скоростей.
Кинематический расчет привода состоит из следующих основных частей: определения общего передаточного числа; разбивки общего передаточного числа по ступеням; расчета кинематической погрешности.
1.5.1 Определение общего передаточного числа
Общее передаточное число определяется как отношение частоты вращения вала электродвигателя к частоте вращения вала редуктора (коробки скоростей):
 . (3)
. (3)
1.5.2 Разбивка общего передаточного числа по ступеням
Разбивка общего передаточного числа привода по ступеням при наличии ременной передачи между электродвигателем и редуктором (коробкой скоростей) заключается в назначении передаточных чисел ременной передачи и каждой ступени редуктора (коробки скоростей). Если же вращающий момент от вала электродвигателя передается посредством соединительной муфты, то выполняется разбивка общего передаточного числа по ступеням закрытой передачи. В каждом из перечисленных случаев общее передаточное число определяется соответствующей зависимостью:
 (4)
(4)
 (5)
(5)
где  – передаточное число ременной передачи;
– передаточное число ременной передачи;
 – передаточные числа соответствующих ступеней закрытой передачи (
– передаточные числа соответствующих ступеней закрытой передачи ( – передаточное число быстроходной ступени
– передаточное число быстроходной ступени  ,
,  – в двухступенчатых передачах передаточное число тихоходной ступени, в трехступенчатых передачах передаточное число промежуточной ступени
– в двухступенчатых передачах передаточное число тихоходной ступени, в трехступенчатых передачах передаточное число промежуточной ступени  ,
,  – в трехступенчатых передачах передаточное число тихоходной ступени
– в трехступенчатых передачах передаточное число тихоходной ступени  ).
).
Передаточное число ременной передачи следует назначить из стандартного ряда передаточных чисел (табл. 8), ограничиваясь значениями от 1 до 2 с целью уменьшения габаритов привода.
Номинальное значение передаточного числа редуктора (коробки скоростей)  определяется по формуле
определяется по формуле
 . (6)
. (6)
Таблица 8 – Стандартные значения передаточных чисел (из ГОСТ 2185-87 и ГОСТ 12289-76)
| 1-й ряд | 1,0 | 1,25 | 1,6 | 2,0 | 2,5 | 3,15 | |||||
| 2-й ряд | 1,12 | 1,4 | 1,8 | 2,24 | 2,8 | ||||||
| 1-й ряд | 4,0 | 5,0 | 6,3 | 8,0 | 10,0 | ||||||
| 2-й ряд | 3,55 | 4,5 | 5,6 | 7,1 | 9,0 | 11,2 |
После назначения стандартного значения передаточного числа ременной передачи уточняется частота вращения входного вала редуктора:
 . (7)
. (7)
В приводах без ременной передачи на входе в редуктор частота вращения входного (быстроходного) вала закрытой передачи равна частоте вращения вала электродвигателя:
 . (8)
. (8)
В этом случае номинальное значение передаточного числа редуктора совпадает с общим передаточным числом привода, рассчитанным по формуле (3):
 . (9)
. (9)
Передаточные числа зубчатых одноступенчатых передач приведены в табл. 8. Передаточные числа червячных передач также выбираются из стандартного ряда, значения которого приведены в табл. 9.
Таблица 9 – Стандартные значения передаточных чисел червячных передач (из ДСТУ2458-98 (ГОСТ2144-93)

| 11,2 | 12,5 | 22,4 | ||||||||
| 31,5 | 35,5 | __ |
От разбивки общего передаточного числа в двух- и трехступенчатых редукторах (а также в коробках передач) в значительной степени зависят удобство смазывания колес и компоновки деталей, а также конструкция корпуса и его габариты. Универсальной рекомендации по разбивке общего передаточного числа по ступеням, удовлетворяющей всем указанным условиям, не существует. Выбор способа разбивки зависит от конкретных требований, которым должна отвечать конструкция: обеспечения минимальных габаритов редуктора, минимальной массы зубчатых колес, получения одинакового погружения зубчатых колес всех ступеней в масляную ванну, создания устойчивой наименьшей площади корпуса редуктора и другого.
При разбивке общего передаточного числа в двухступенчатых редукторах можно пользоваться рекомендациями, приведенными в табл. 10. Рассчитанные по предложенным зависимостям передаточные числа ступеней округляют до стандартного ближайшего значения (см. табл. 8,9), после чего по формулам (4), (5) определяется фактическое значение общего передаточного числа привода. Для двух- и трехступенчатых редукторов фактические общие передаточные числа соответственно равны:
 , (10)
, (10)
 . (11)
. (11)
Поскольку частоты вращения выходных валов коробок представляют геометрическую прогрессию со знаменателем  , то по заданной минимальной частоте
, то по заданной минимальной частоте  , соответствующей максимальному моменту
, соответствующей максимальному моменту  , рассчитываются остальные частоты:
, рассчитываются остальные частоты:  ,
,  и так далее.
и так далее.
Таблица 10 – Рекомендации по разбивке общего передаточного числа двухступенчатых редукторов по ступеням
| Редуктор | Схема | Передаточное отношение | |

| 
| ||
| Двухступенчатый по развернутой схеме |  
| 
| 
|
Продолжение таблицы 10
| Двухступенчатый соосный | 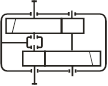
|
| 
|
| Двухступенчатый соосный с внутренним зацеплением | 
| 
| 
|
| Коническо-цилиндри-ческий | 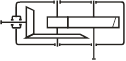
|
| 
|
| Зубчато-червячный | 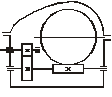
| 1,4…1,8 | 
|
| Червячно-зубчатый | 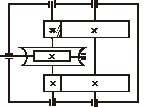
|
| 3,15...5 |
Наиболее употребительные значения  Разбивка по ступеням выполняется для всех возможных скоростей вращения выходного вала. Обычно расстояние между опорами в коробках скоростей больше, чем в редукторах. Поэтому для них рекомендуется в начале кинематической цепи принимать меньшие передаточные числа, а в конце – большие. Это положение обеспечивает не резкое, а постепенное увеличение габаритов передач, валов, опор. Для блочных пар рекомендуется принимать
Разбивка по ступеням выполняется для всех возможных скоростей вращения выходного вала. Обычно расстояние между опорами в коробках скоростей больше, чем в редукторах. Поэтому для них рекомендуется в начале кинематической цепи принимать меньшие передаточные числа, а в конце – большие. Это положение обеспечивает не резкое, а постепенное увеличение габаритов передач, валов, опор. Для блочных пар рекомендуется принимать  .
.
1.5.3 Расчет кинематической погрешности
Оценка погрешности кинематического расчета редуктора заключается в расчете ошибки фактического передаточного числа относительно номинального:
 . (12)
. (12)
Кинематический расчет считается выполненным удовлетворительно, если выполняется неравенство
 , (13)
, (13)
где [Du] – допускаемое значение относительной погрешности. Для одноступенчатых редукторов [Du]=2,5%, для двухступенчатых редукторов [Du]=4%.
1.6 Расчеты частот, мощностей и вращающих моментов отдельных элементов привода
1.6.1 Расчет частот вращения
В схемах с ременной передачей на входе редуктора частота вращения ведущего шкива равна частоте вращения вала электродвигателя:
 .
.
Частота вращения ведомого шкива равна частоте вращения входного вала редуктора и всех элементов (шестерен, червяков, муфт), жестко связанных с этим валом:
 ,
,
где  – частота ведущего элемента быстроходной ступени, например шестерни или червяка.
– частота ведущего элемента быстроходной ступени, например шестерни или червяка.
При отсутствии ременной передачи между валом электродвигателя и входным валом редуктора (соединение названных валов при помощи муфты или использование в схеме электродвигателя фланцевого исполнения с жестким соединением тех же валов)
 .
.
Частота вращения промежуточного вала многоступенчатой закрытой передачи и всех элементов, установленных на этом валу, (зубчатых и червячных колес, муфт) зависит от передаточного числа быстроходной ступени:
 ,
,
где  – частота вращения ведомого элемента быстроходной ступени, например зубчатого или червячного колеса;
– частота вращения ведомого элемента быстроходной ступени, например зубчатого или червячного колеса;  – частота вращения ведущего элемента тихоходной ступени.
– частота вращения ведущего элемента тихоходной ступени.
Частота вращения выходного (тихоходного) вала двухступенчатого редуктора и связанных с ним элементов, (ведомого колеса тихоходной ступени, муфты, ведущей звездочки цепной передачи) равна:
 ,
,
где  – частота вращения ведомого элемента тихоходной ступени;
– частота вращения ведомого элемента тихоходной ступени;  – частота вращения ведущей звездочки цепной передачи, установленной на выходном валу редуктора.
– частота вращения ведущей звездочки цепной передачи, установленной на выходном валу редуктора.
1.6.2 Расчет мощностей
Мощности, передаваемые элементами привода, рассчитываются с учетом потерь, величина которых определяется соответствующими КПД (см. табл. 6):
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
В приведенных расчетных зависимостях приняты следующие обозначения:
 – потребная мощность электродвигателя;
– потребная мощность электродвигателя;
 и
и  – соответственно мощности на ведущем и ведомом шкиве ременной передачи;
– соответственно мощности на ведущем и ведомом шкиве ременной передачи;
 и
и  – мощности на входном и выходном валу редуктора;
– мощности на входном и выходном валу редуктора;
 – мощности на ведущих и ведомых элементах быстроходной и тихоходной ступени редуктора;
– мощности на ведущих и ведомых элементах быстроходной и тихоходной ступени редуктора;
 – КПД ременной передачи;
– КПД ременной передачи;
 – КПД пары подшипников качения;
– КПД пары подшипников качения;
 – КПД зацепления (зубчатой или червячной передачи).
– КПД зацепления (зубчатой или червячной передачи).
1.6.3 Расчет вращающих моментов
После определения частот и соответствующих мощностей величины вращающих моментов для каждого элемента привода можно рассчитать по формуле
 .
.
Для удобства представления результаты расчетов сведены в табл. 11.
Таблица 11 - Результаты расчетов частот, мощностей и крутящих моментов на отдельных элементах привода
| Параметры | Электродвигатель | Ременная передача | Редуктор | Цепная передача | ||||
| вщ | вд | 
| 
| 
| 
| |||

| 
| 
| 
|
|
|
|
|
|

| 
|
|
| 
| 
| 
| 
| 
|

| 
| 
| 
| 
| 
| 
| 
| 
|

| --- | 
| 
| 
| 
|
1.7 Примеры расчетов
Пример 1. Выполнить кинематический расчет привода по приведенной схеме и исходным данным (рис.2).

Рисунок 2 – Пример задания на курсовой проект
Общие замечания к расчету
а) Вращающий момент от электродвигателя передается входному валу редуктора через ременную передачу, ведущий шкив которой закреплен на валу электродвигателя, а ведомый – на входном валу редуктора. Чем меньшим будет назначено передаточное число ременной передачи, тем меньшим будет диаметр ведомого шкива и компактнее передача (рис. 3). С другой стороны, чем выше частота вращения вала электродвигателя при заданной (потребляемой) мощности, тем меньше его вес и стоимость. В зависимости от числа пар полюсов простые асинхронные электродвигатели имеют теоретические (синхронные, без учета скольжения) частоты вращения: 3000, 1500, 1000, 750  .
.

Рисунок 3 – Ременная передача
Рекомендуется назначить стандартное передаточное число ременной передачи: = 1,12; 1,25; 1,4; 1,6; 1,8.
б) Двухступенчатый цилиндрический редуктор имеет минимальную массу и оптимальную конструкцию, если диаметры колес (ведомых элементов ступеней) будут приблизительно равны друг другу. Это достигается подбором передаточных чисел ступеней: большее - у первой ступени (d  /d
/d  ) и меньшее – у второй (d
) и меньшее – у второй (d  /d
/d  ) (рис.4).
) (рис.4).
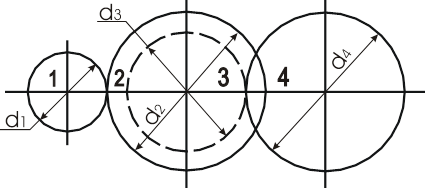
Рисунок 4 – Схема двухступенчатого редуктора
в) Кинематическая цепь привода: ременная передача – первая ступень редуктора – вторая ступень редуктора.
 ,
,
где  – общее передаточное число привода;
– общее передаточное число привода;
– передаточное число ременной передачи;
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 408; Нарушение авторских прав?; Мы поможем в написании вашей работы!