КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Билет 17. АЧХ-кривая,описывающая зависимость амплитуды вынужденных установившихся колебаний от частоты внешней силы
|
|
|
|
АЧХ и ФЧХ. Резонанс.
АЧХ-кривая,описывающая зависимость амплитуды вынужденных установившихся колебаний от частоты внешней силы.
ФЧХ-то же для разности фаз вынужденных колебаний и внешней силы. резонанс: w»w0
А=А0sin(w0t+j)
Ä+w02A=0
2gÁ=(F0/m)sinw0t
A=(F0/2mgw0)sin(wt-p/2)
A0=F0/2mgw0=(F0/mw02)*(w0/2p)=(F0/k)*Q
 tg j = (2gw)/(w02-w2)
tg j = (2gw)/(w02-w2)
½(w0-w)/w½ << 1
(w02-w2)2 = (w0-w)2*(w0+w)2; w0+w ≈ 2ω; 4γ2ω2 ≈ 4γ2ω02
 – Формула Лоренца
– Формула Лоренца
∆ω = 2δ=ω0/Q - ширина резонансной кривой.
g=d — дектремент затухания.
W=(ω02-g2)1/2.
Вопрос 1.
Движение тела с одной закреплённой точкой. Регулярная прецессия свободного симметричного волчка.
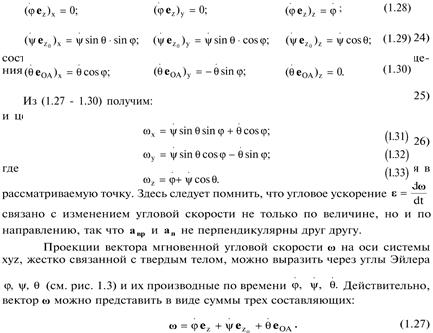
Движение твердого тела с одной неподвижной точкой. В этом случае тело имеет три степени свободы – начала систем XYZ и x 0 y 0 z 0, введенных в начале лекции, можно совместить с точкой закрепления, а для описания движения тела использовать три угла Эйлера: j=j(t), y=y(t), q=q(t).
 Для твердого тела с одной неподвижной точкой справедлива теорема Эйлера: твердое тело, закрепленное в одной точке, может быть переведено из одного положения в любое другое одним поворотом на некотjрый угол вокруг неподвижной оси, проходящей через точку закрепления. Cледствие из этой теоремы: движение закрепленного в точке твердого тела в каждый момент времени можно рассматривать как вращение вокруг мгновенной оси, проходящей через точку закрепления. Положение этой оси как в пространстве, так и относительно самого тела с течением времени общем случае меняется. Г М положений мгновенной оси вращения относительно неподвижной системы XYZ (или x 0 y 0 z 0) – это сложная коническая поверхность с вершиной в точке закрепления. В теоретической механике ее называют неподвижным аксоидом. Г М положений мгновенной оси вращения относительно подвижной системы xyz, жестко связанной с твердым телом, – это тоже коническая поверхность – подвижный аксоид. Линейная скорость произвольной точки твердого тела вокруг мгновенной оси: v=w´r, где r – радиус-вектор точки относительно начала системы XYZ (или x 0 y 0 z 0), совмещенного с точкой закрепления.
Для твердого тела с одной неподвижной точкой справедлива теорема Эйлера: твердое тело, закрепленное в одной точке, может быть переведено из одного положения в любое другое одним поворотом на некотjрый угол вокруг неподвижной оси, проходящей через точку закрепления. Cледствие из этой теоремы: движение закрепленного в точке твердого тела в каждый момент времени можно рассматривать как вращение вокруг мгновенной оси, проходящей через точку закрепления. Положение этой оси как в пространстве, так и относительно самого тела с течением времени общем случае меняется. Г М положений мгновенной оси вращения относительно неподвижной системы XYZ (или x 0 y 0 z 0) – это сложная коническая поверхность с вершиной в точке закрепления. В теоретической механике ее называют неподвижным аксоидом. Г М положений мгновенной оси вращения относительно подвижной системы xyz, жестко связанной с твердым телом, – это тоже коническая поверхность – подвижный аксоид. Линейная скорость произвольной точки твердого тела вокруг мгновенной оси: v=w´r, где r – радиус-вектор точки относительно начала системы XYZ (или x 0 y 0 z 0), совмещенного с точкой закрепления.
Эти уравнения наз. уравнениями Эйлера. В ряде случаев движение с одной закр. точкой можно представить как суперпозицию 2-х вращений вокруг пересекающихся осей, угловые скорости складываются векторно.
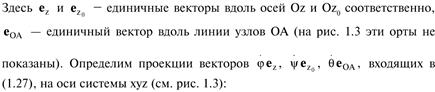 |
Регулярная прецессия свободного симметричного волчка. Рассмотрим тяжелый симметричный гироскоп, у которого неподвижная точка S (точка опоры о подставку) не совпадает с центром масс О (рис. 4.6). Момент силы тяжести относительно точки S: M=mg l sinq. Изменение момента импульса L определяется выражением: dL=Mdt. При этом и L, и ось волчка прецессируют вокруг вертикального направления с угловой скоростью W. Еще раз подчеркнем: делается допущение, что выполнено условие w>>W и что L постоянно направлен вдоль оси симметрии гироскопа.
dL=L sinqWdt, dL=W´L dt Þ M= dL=W´L.
Это соотношение позволяет определить направление прецессии при заданном направлении вращения волчка вокруг своей оси. Обратим внимание, что M определяет угловую скорость прецессии, а не угловое ускорение, поэтому мгновенное «выключение» M приводит к мгновенному же исчезновению прецессии, то есть прецессионное движение является безынерционным.
mglsinq=WJzw sinq Þ W=mgl/Jzw
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 596; Нарушение авторских прав?; Мы поможем в написании вашей работы!