КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Динамический параллелизм
|
|
|
|
Один конвейер хорошо, а два лучше? Почему бы, если позволяют ресурсы интегральной технологии, не построить два конвейера и ставить на них одновременно пару команд программы. В процессоре Pentium именно так и сделали — предусмотрели два 5-уровневых конвейера, которые могли работать одновременно и выполнять две целочисленные команды за машинный такт.
(Страница219)
Однако возможность одновременной постановки на два разных конвейера пары последовательных команд программы ограничивается рядом условий. Очевидно, что нельзя ставить на разные конвейеры две последовательные команды, если вторая использует в качестве операнда результат работы первой или, во всяком случае, необходимо гарантировать, что к началу стадии выборки операндов второй команды первая (на другом конвейере) уже завершит стадию размещения результата. Существуют и другие ограничения, которые определяют т. н. условия "спаривания" последовательных команд (pairing), позволяющие размещать их одновременно на разных конвейерах.
В процессоре Pentium два конвейера не являются равноправными. Один из них (U) может принять любую команду, а другой (V) — только удовлетворяющую условиям "спаривания" (довольно сложным) с командой, поставленной на U. Если эти условия не соблюдаются, следующая команда так же помещается на U-конвейер, а V-конвейер пропускает такт. Некоторые команды могут появляться только на U-конвейере.
Разумеется, производительность двухконвейерного процессора, при прочих равных условиях, превышает производительность одноконвейерного, но далеко не в два раза. Эффективность во многом определяется, насколько часто будут встречаться в программе пары последовательных команд, допускающих "спаривание".
Очевидно, движение в направлении увеличения в процессоре числа конвейеров, работающих по описанным выше принципам, бесперспективно. Условия "страивания" (если можно так сказать) и т. д. будут настолько сложны, что редко будут выполняться.
Следующим шагом на пути увеличения производительности было решение, которое принято называть динамическим параллелизмом, а процессоры, реализующие этот принцип, называют суперскалярными.
Рассмотрим фрагмент программы, написанный на некотором условном языке:
MOV Rl, R4
ADD Rl, @R0
MOV R5, R6
SUB R5, R7
CLR R6
Вторая команда этого фрагмента использует в качестве операнда содержимое ячейки памяти (косвенно-регистровая адресация) и, следовательно, попав на конвейер, будет "тормозить" его (Здесь мы не обсуждаем возможности кэш-памяти.) на стадии А. В то же время следующие три команды этого фрагмента никак не связаны с результатами работы второй команды, выполняют действия только над регистрами и могли бы выполняться еще до завершения предыдущей команды, однако в этом случае пришлось бы изменить порядок выполнения команд, определенный программой, чего конвейер не предусматривает.
Суперскалярная архитектура процессора предполагает, что команды (на некотором ограниченном участке программы) могут выполняться не только в порядке их размещения в программе, но и по мере возможности их выполнения независимо от порядка следования. Возможность выполнения определяется, во-первых, отсутствием зависимостей от ранее расположенных, но еще не завершенных команд, во-вторых, наличием свободных ресурсов процессора, необходимых для выполнения команды.
Одним из первых микропроцессоров, реализующих механизм динамического параллелизма, был процессор Pentium Pro (Pentium II) фирмы Intel (рис. 7.15).
На кристалле процессора размещаются два блока кэш-памяти первого уровня, в одном из которых (кэш-С) размещается программа, а в другом (кэш-D) — данные.
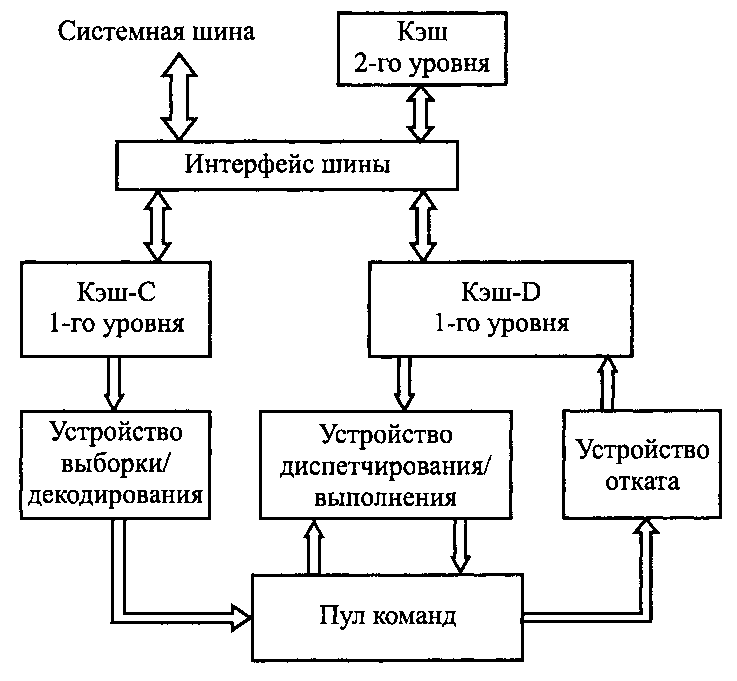
Рис. 7.15. Структура процессора Pentium Pro
Устройство выборки/декодирования выбирает очередную команду из кэш-C (в порядке их размещения в программе), при необходимости заменяет сложные команды на последовательность микрокоманд, снабжает каждую команду полем признаков (тегом) и помещает в специальным образом организованную память — пул команд.
Устройство диспетчирования постоянно анализирует, с одной стороны, содержимое пула команд и выявляет команды, готовые к выполнению на какой-нибудь стадии, с другой стороны — свободные в данный момент операционные устройства. При совпадении "желания" (команда завершила предыдущую стадию и готова к выполнению следующей) и "возможностей" (свободны соответствующие ресурсы) устройство диспетчирования отправляет команду на выполнение независимо от порядка поступления команд в пул. После завершения обработки на очередной стадии команда возвращается в пул с соответствующей пометкой в поле тега.
Устройство отката размещает результаты выполнения команд по адресам назначения. Оно просматривает содержимое пула команд, отыскивает команды, завершившие работу, и извлекает их из пула с размещением результата в строгом соответствии с порядком расположения команд в программе.
Небольшое количество регистров в архитектуре процессоров Intel приводит к интенсивному использованию каждого из них и, как следствие, к возникновению множества мнимых зависимостей между командами, использующими один и тот же регистр. Поэтому, чтобы исключить задержку в выполнении команд из-за мнимых зависимостей, устройство диспетчирования/выполнения работает с дублями регистров, находящимися в пуле команд (одному регистру может соответствовать несколько дублей).
Реальный набор регистров контролируется устройством отката, и результаты выполнения команд отражаются на состоянии вычислительной системы только после того, как выполненная команда удаляется из пула команд в соответствии с истинным порядком команд в программе.
Таким образом, принятая в Pentium Pro технология динамического выполнения может быть описана как оптимальное выполнение программы, основанное на предсказании будущих переходов, анализе графа потоков данных с целью выбора наилучшего порядка исполнения команд и на опережающем выполнении команд в выбранном оптимальном порядке. Однако следует иметь в виду, что процессор оптимизирует выполнение только ограниченного участка программы, который в текущий момент располагается в пуле.
Суперскалярная архитектура предполагает наличие на кристалле процессора нескольких параллельно работающих операционных устройств (в т. ч. и нескольких одинаковых). Так, например, RISC-процессор PowerPC содержит шесть параллельно работающих исполнительных устройств: блок предсказания ветвлений, два устройства для выполнения простых целочисленных операций (сложение, вычитание, сравнение, сдвиги, логические операции), одно устройство для выполнения сложных целочисленных операций (умножение, деление), устройство обработки чисел с плавающей запятой и блок обращения к внешней памяти. При этом обеспечивается одновременное выполнение четырех команд.
Все операций обработки данных выполняются с регистровой адресацией. При этом для хранения целочисленных операндов используется блок, включающий тридцать два 32-разрядных регистра, а для хранения операндов с плавающей запятой — блок из тридцати двух 64-разрядных регистров.
Выборка данных из памяти производится только командами пересылки, которые выполняются блоком обращения к памяти и осуществляют загрузку данных в регистры или запись их содержимого в память.
При параллельной работе исполнительных устройств возможно их одновременное обращение к одним регистрам. Чтобы избежать ошибок, возникающих при этом в случае записи нового содержимого до того, как другим устройством будет считано предыдущее, введены буферные регистры — 12 для целочисленных регистров и 8 — для регистров с плавающей запятой. Эти регистры служат для промежуточного хранения операндов, дублируя основные регистры блоков, используемые при выполнении текущих операций. После завершения операций производится перезапись полученных результатов в основные регистры (обратная запись).
|
|
|
|
|
Дата добавления: 2015-04-25; Просмотров: 980; Нарушение авторских прав?; Мы поможем в написании вашей работы!