КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Подключение электроники на авиамодели
|
|
|
|
Цена полного цикла: от 20тр.за м2
Комплектация
Наружные стены Durisol DSs 30/12
Внутренние стены Durisol DM 15/9
Перекрытие деревянное из бруса 100*200 с шум изоляцией
Стропильная часть
Кровля из металла черепицы с утеплением 200 мм.
Фундамент ростверк буро набивные сваи
Окна пластик
Входная дверь
Водосточная система
Отделка фасада (фасадная штукатурка «короед»)
Схема 1. Простейший борт.
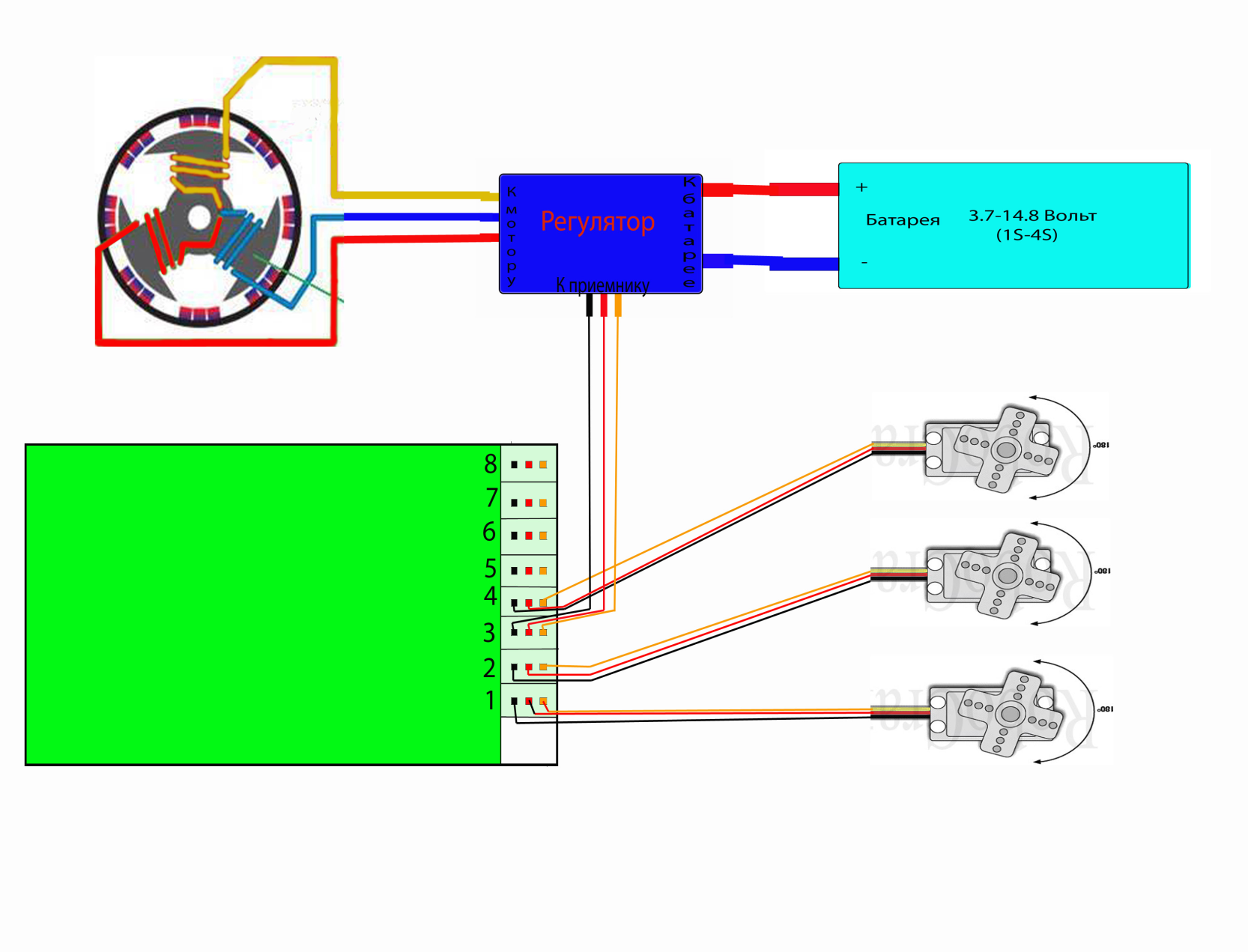
Здесь все просто. Используя обычные кабели соединяем все как показано на схеме 1. Мотор присоединяется к трем соответствующим проводам регулятора (три толстых провода одного или разных цветов - как правило на них есть маркировка), три тонких цветных провода регулятора (черный,красный и желтый) включаются чаще всего в третий канал приемника. Черный провод это земляная шина и "-" питания, красный это "+" питания приемника и рулевых машинок, а желтый провод (иногда белый) - это шина управления регулятором по каналу "газ". В последнюю очередь, обычно перед запуском модели, подключаются провода идущие к батареи. Это два очень толстых провода, которые как правило расположены на регуляторе с двух сторон, по краям, вокруг тонкой, трехжильной шины питания-управления уходящей на приемник, черный идет к "-" батареи, а красный соответственно к "+" силового разъема батареи.
Назначение регулятора в этой схеме двойное. С одной стороны он формирует диаграмму и напряжение питания мотора, а с другое преобразовывает высокое напряжение батареи 7.4-14.8 вольт с помощью схемы BEC (или UBEC) в напряжение питания приемника и РМ (4.8-6.0 В).
Каждая рулевая машинка, в свою очередь, присоединяется к соответствующему каналу приемника трехжильным проводом с помощью штатного разъема. Цвета отдельных проводов такие же как на шине управления регулятором: черный - земля и "-" питания РМ, красный "+" питания, а желтый или черный это сигнальная шина управления РМ. Таким образом, ток питания снимется с BEC (UBEC) регулятора, проходит в приемник и там распределяется по рулевым машинкам.
В простейшей схеме очень важно не перегрузить BEC регулятора. Сумма максимальных токов потребления всех рулевых машинок не должна превышать максимально возможную токоотдачу схемы BEC. Как правило максимальная токоотдача схемы BEC в большинстве регуляторов имеет значение порядка 1.5-3 ампера. Ток потребления рулевых машинок в спокойном состоянии чаще всего небольшой (20-50 mА), но очень сильно возрастает во время работы под нагрузкой и может достигать в режиме удержания (когда машика уже не может повернуть рычаг, но еще в состоянии его удерживать в неподвижном положении) величины порядка 1.0-1.5 ампера. Таким образом суммарный ток потребления РМ в наихудшем случае иногда может достигнуть величины в 3 ампера и более. Однако при рассмотрении этой простейшей схемы мы будем считать, что с током потребления РМ у нас все в порядке. Обычно в всего случае 3-4 РМ мощности схемы BEC почти всегда достаточно для питания всех РМ в любых режимах при обычных примениях. Заметим только то, что весь этот ток идет от BEC через приемник и только потом поступает в РМ-ы. Не очень хорошо, но для простейшей схемы более-менее допустимо. Пока просто запомним этот факт.
Время полета в часах можно вычислить так: берем емкость батареи в мАч и делим на средний ток потребления всего борта (ток приемника+средний ток всех РМ+ средний ток мотора). Результатом будет количество часов полета в часах... К примеру батарея иммет емкость 2000 мАч, ток потребления мотора - 10 ампер или 10000мА, ток потребления приемника ~ 20 мА, а средний ток потребления каждой РМ - 50 мАч. Сумма токов будет 10170 мА (т.е. в основном это ток мотора). Делим 2000 мАч на 10170: 2000/10170 = 0.197 часа или около 12 минут полета на среднем газе. На максимальном газу время полета естественно сократится.
Один из наиболее часто возникающих вопросов у новичков: а как подключать два или больше моторов? В случае подключения одинаковых коллекторных моторов для многомоторной модели все достаточно тривиально: моторы просто подключаются параллельно к двум проводам регулятора, предназначенных для питания мотора. Если надо получить вращение мотров в разные стороны, то на одном из них изменяется полярность питания(т.е. меняются местами два провода) и все. Самое главное, что нужно не забывать, это то, что максимальный ток регулятора отдаваемый моторам должен быть не меньше суммы максимальных токов потребления всех моторов, а лучше больше хотя бы с небольшим запасом. В идеале токоодача регулятора должна быть больше чем N*Iост, где N-количество моторов, а Iост - это ток потребления мотора в режиме остановки(когда его вал не может провернуться из-за нагрузки - к примеру его заклинило, или мы сами не даем провернуться удерживая винт модели).
Для нескольких БК-моторов все становится существенно сложнее. Каждый БК-мотор должен иметь свой регулятор оборотов. Дело тут в том, что Регулятор не только изменяет величину напряжения и тока протекающего через мотор, но и еще формирует вполне определенную диаграмму включения-выключения обмоток БК-мотора, отслеживая положение ротора мотора по ЭДС самоиндукции, возникающей при вращении ротора. Соединять БК-моторы просто впараллель категорическине рекомендуетсяи даже простозапрещается.
Не верьте никому, кто Вам скажет: а вот я соединил и они у меня вертятся хорошо. Да - без нагрузки обычно крутиться будут, т.к. повторяемость параметров моторов достаточно высокая и они на холостом ходу без нагрузки, как правило, будут оба крутиться синхронно. Но как только появится нагрузка - так все и закончится. Нагрузка на одном моторе неизбежно будет отличаться от нагрузки на другом - причин для этого очень много: чуть разные винты, разные режимы обдува винтов при повороте модели, в конце-концов разное количество грязи, которое попало в подшипники - да мало ли что... В итоге произойдет рассинхронизация моторов, импульсы ЭДС самоиндукции и ее диаграммы будут разными, они просуммируются, и не будут соответствовать ничему. Это запутает регулятор и диаграмма импульсов от регулятора к моторам станет неправильной, что приведет в конце-концов к остановке одного или обоих моторов и к их перегреву.
Правильная схема подключения 2-х БК-моторов представлена ниже на Схеме 2.

На Схеме 2 все почти так же как на схеме 1, но регуляторов два и два БК-мотора. Раширение схемы до тре-четырех моторов тривиально просто станет больше моторов и регуляторов. Что тут важно заметить? А то, что приемник и рулевые машинки питаются только от регулятора 1. На втором регуляторе на т.н. Y-кабеле красный провод перерезан (не присоединяется к приемнику) и питание приемника и РМ идет только от BEC Регулятора 1. Это важно запомнить и тщательно соблюдать в такой схеме. Нельзя соединять вместе красные провода разных BEC-ов. Да особенно и не нужно в нашем случае. Вариант их объединения через диоды Шоттки рассматривать тут не будем из-за его весьма низкой полезности.
Все остальное на Схеме 2 точно так же как на Схеме 1 и все сказанное про схему 1, также будет справедливо для схемы 2.
Теперь отдельно рассмотрим ток потребления РМ. Дело в том, что ток потребления рулевой машинки, в зависимости от нагрузки способен изменяться в десятки и сотни раз. В спокойном состоянии она потребляет от 20 мА до 50 мА, при интенсивном движении ее ток вырастает до 200-300-500 мА, в зависимости от ее конструкции, а при очень большой нагрузке может достигать величины в 1.0-1.5 Ампера. Все это было бы ничего - экстремальные нагрузки явление редкое, но вот в сложных случаях - количество РМ на модели растет и может достигать 10-12 и более штук.
Соответственно максимальный суммарный ток потребления РМ становится порядка тока потребления двигателя. Причем рамер РМ имеет очень малое значение. Совсем не факт что под критической нагрузкой мини(микро) РМ потребляет меньше чем полноразмерная машинка. Она может потреблять даже больше, чем большая РМ, - из-за меньшей эффективности двигателя. Вот теперь вспомните как проходит ток в простейшей схеме.... Вспомнили? Да - весь суммарный ток потребления от BEC идет прямо на разъем приемника, а внутри приемника расходится по кабелям РМ... Что будет с вашим приемником в критическом случае, когда к примеру 10-15 ампер пройдут через разъем канала газа? Приемник перегреется как минимум, а как максимум просто погорит со взрывом и мгновенным испарением печатных проводников на плате. Слава богу почти никакой BEC такой ток выдать не способен. Но тут другая засада.
BEC такой ток дать не может но, перегревается и напряжение на его выходе резко падает до тех пор, пока нагрузка на РМ не упадет и не снизится их ток потребления. Чем черевато падение напряжения питания борта? А тем, что приемник это почуствует и перезапустится... Современные приемники на 2.4 Ггц вначале работы(после включения питания) довольно долго ищут свой передатчик (Bind приемника) и синхронизируются с ним в течении нескольких секунд. Старые FM-приемники 35-40 мГц этой особенности не имели - ну упало напряжение и упало, выключился-включился когда оно поднялось и почти порядок... Сейчас как правило еще несколько секунд после провала-подъема напряжения приемник не в состоянии управлять РМ.... Ну вот и представьте себе - заход на посадку, интенсивная работа всеми рулями, выпуск шасси, выпуск закрылков - вот вам уже перегрузка BEC - все работает практически одновременно - почти все рулевые машинки, да еще и под большой нагрузкой, т.к. углы отклонения рулей могут быть значительно больше обычных. Просело напряжение питания и привет, - в последние 3-5 секунд, у самой земли, модель теряет управление (пилот в обмороке). Результат - дрова.
Вывод из этого длинного пассажа: нельзя использовать простейшую схему соединения элементов борта, если число РМ превышает 3-4 штуки.
Схема соединения элементов борта, учитывающая описанные выше проблемы, для случая шести РМ приеведена на Схеме 3 ниже.
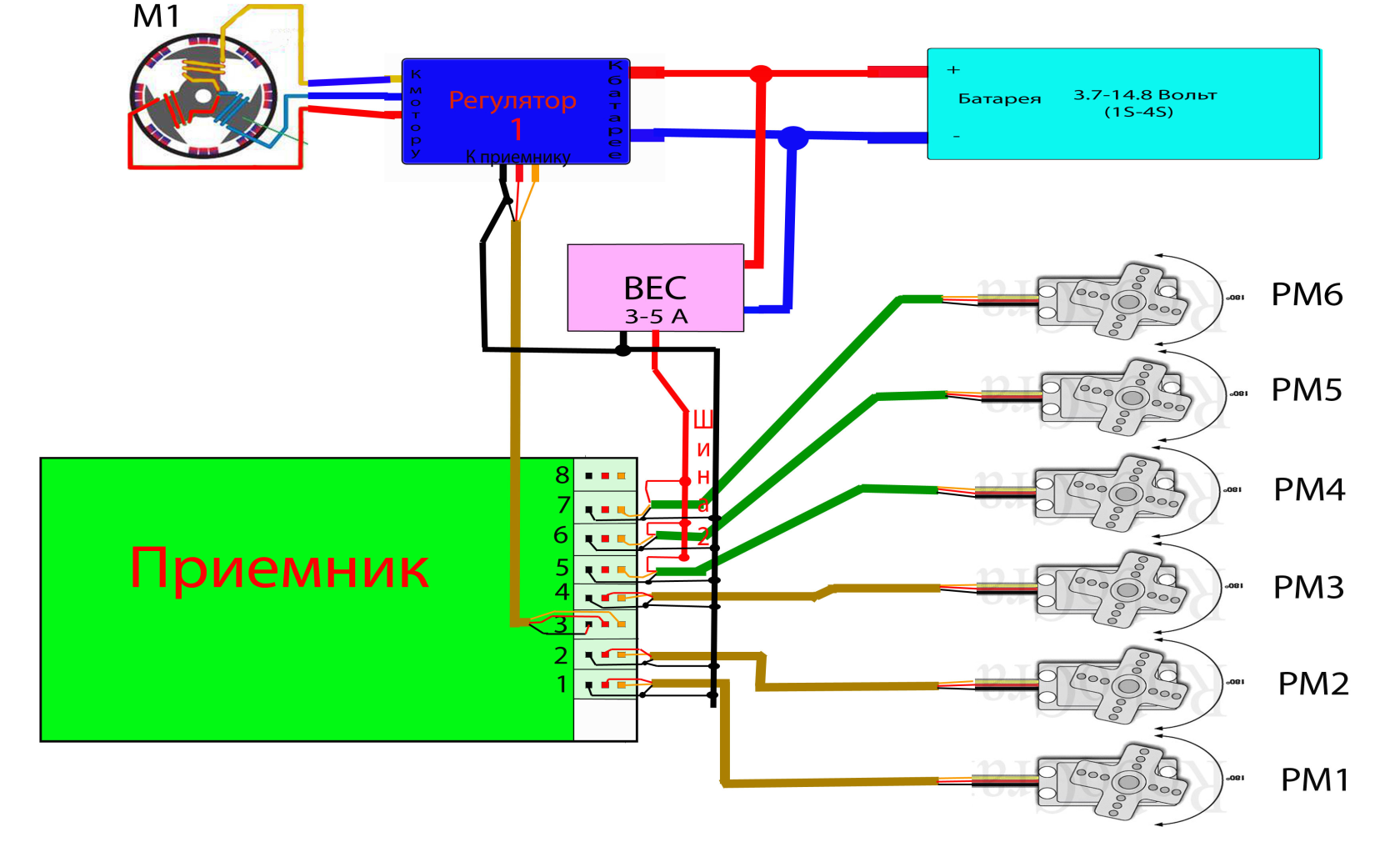
Здесь для питания второй группы РМ использован отдельный BEC не слишком большой мощности, сравнимый со встроенным BEC регулятора. Первые три машинки питаются по прежнему через приемник от BEС регулятора, и регулятор и приемник это выдержат. А для питания второй группы машинок используется независимы BEC с отдельной шиной питания Шина 2 (см схему). Кроме того, чтобы избежать прохождение большого тока через приемник проведена отдельная земляная шина ко всем РМ - это сушественно уменьшит нагрузку на внутренние проводники приемника.
Простое пересечение шин на схеме - это не контакт - это просто прводники пересеклись без контакта. А там где проводники должны контактировать, там поставлена жирная круглая точка на пересечении. Естественно для такого соединения стандартные кабели уже не годятся, их так или иначе придется модернизировать.
Третья схема возможна во многих вариантах. Например в схеме с двумя и более моторами + 2 и более регулятора, независимый BEC не нужен - вторую группу машинок можно запитать по Шине 2 от второго BEC-а, который в схеме 2 был незадействован, сделать можно по аналогично тому, как это сделано на схеме 3. Другой вариант: берем независимый BEС помощнее и все машинки запитываем только от него и вообще не используем BEC регулятора или от него запитывает один только приемник и тогда провалы на шине 2(питания РМ) нам будут не страшны - приемник их не увидит. В общем допустимых вариантов много.
Выбирая между линейным BEC и импульсным (трансформаторным) UBEC, я бы сделал выбор в пользу UBEC, помехи от него не так значительны как их часто расписывают и от них легко защититься, зато мощность он обычно имеет большую и не греется так как линейный. Это происходит потому, что в линейном BEС лишнее напряжение по сути переводится в тепло (прикиньте - ток 1-3 ампера и при батарее 14.8 вольта 10 вольт гасится на внутреннем сопротивлении самого BEC - т.е. он рассеивает тепловую мощность от 10 до 30 ватт!). А это между протчим далеко не лишняя энергия. Модель сможет летать существенно дольше при той же батарее, если использовать регуляторы с UBEC вместо BEC.
Да - еще одно(самое последнее) замечание, на первой схеме у меня показана аккумуляторная батарея от 1S до 4S, а я везде говорю про питание РМ и приемника от 4.8 до 6 вольт. Это не ошибка! На парклайере есть регуляторы 1S c импульсным, повышающим BEС, который имеет выходное напряжение порядка 5-6 вольт - я такой пользую если мне нужно 5-ти вольтовое питание от одной банки LiPo....
|
|
|
|
|
Дата добавления: 2015-05-06; Просмотров: 6146; Нарушение авторских прав?; Мы поможем в написании вашей работы!