КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Контрольні запитання. 1. Момент сил і момент імпульсу системи матеріальних точок відносно деякого початку (точки О)
|
|
|
|
1. Момент сил і момент імпульсу системи матеріальних точок відносно деякого початку (точки О). Зв'язок між ними - рівняння моментів для системи матеріальних точок.
2. Закон збереження моменту імпульсу для системи матеріальних точок.
3. Момент імпульсу і момент сил відносно деякої осі. Рівняння моментів відносно цієї осі
4. Момент інерції твердого тіла відносно нерухомої осі обертання. Теорема Штейнера. Основне рівняння динаміки обертального руху твердого тіла навколо нерухомої осі.
5. Рівняння руху фізичного маятника. Його розв'язок для малих відхилень від положення рівноваги - гармонічні коливання.
6. Залежність періоду коливань Т фізичного маятника вія відстані "а" між центром мас і топкою підвісу.
7. Метод вимірювання прискорення сили тяжіння  за допомогою перекидного маятника.
за допомогою перекидного маятника.
8. Як слід планувати експеримент, щоб забезпечити мінімальну похибку у вимірюванні ?
8.Дайте відповіді на запитання, які пропонуються в тексті.
1.
Лабораторна робота № 2
Визначення класу точності інформаційно-вимірювальної системи
Мета роботи: Вивчення методики визначення класу точності і оцінка класу точності ІВС за результатами експерименту.
Прилади, обладнання, інструменти: комп’ютер, прикладне програмне забезпечення, вимірювальний інструмент, обладнання для вимірювання електричних величин.
1. Загальні теоретичні відомості
Клас точності будь-якого засобу вимірювання визначається його максимальною приведеною погрішністю. При цьому вважається, що значення вимірюваної величини X (еталону) і відповідні покази приладу Y пов'язані так званим рівнянням шкали, що є лінійною залежністю вигляду
y = а·X + b
де а і b - деякі коефіцієнти.
Погрішність вимірювання оцінюється величиною середньоквадратичного відхилення σ, яка обчислюється за відомою формулою
де D[Y/X] =  умовна дисперсія випадкової величини Y при фіксованому значенні X, X = Xj
умовна дисперсія випадкової величини Y при фіксованому значенні X, X = Xj
M[Y/Xj] =  - умовне математичне очікування величини Yпри фіксованому значенні X, X = Хj,
- умовне математичне очікування величини Yпри фіксованому значенні X, X = Хj,
N - кількість вимірювань величини Y.
Клас точності вимірювального приладу залежить від максимального значення величини  , знайденого на безлічі значень X: X1,..., Xj.
, знайденого на безлічі значень X: X1,..., Xj.
 ,
,
де  - максимальне значення умовної дисперсії отримане при j=1,...,J
- максимальне значення умовної дисперсії отримане при j=1,...,J
J - кількість значень X, для яких оцінюється клас точності (у роботі J=15). Приведена погрішність з урахуванням нелінійності шкали приладу рівна

дe  - максимальне значення умовного математичного очікування, отримане при j=l,...,J,
- максимальне значення умовного математичного очікування, отримане при j=l,...,J,
B=Y/X - коефіцієнт, що враховує зв'язок виміряної Y і еталонною величини Х(у роботі В=3.21).
Клас точності приладу визначається величиною сумарної погрішності Δ, рівною
де  ,
,
к - коефіцієнт, що враховує закон розподілу величини Y (для нормального розподілу k=2.07).
У лабораторній роботі пропонується на будь-якій мові програмування і в будь-якому операційному середовищі скласти програму, яка дозволяє визначити клас точності деякого вимірювального приладу. Початковими даними для розрахунків є номери еталонних точок (сеансів вимірювань) j і значення Yji, отримані в кожній точці при проведенні експерименту. Результатами повинні бути величини  і Δ в кожній точці, а також графіки цих величин в залежності від j.
і Δ в кожній точці, а також графіки цих величин в залежності від j.
За допомогою розробленої програми необхідно оцінити клас точності приладу, заданого викладачем.
2. Порядок виконання роботи
1. Розробити і налаштувати програму визначення класу точності вимірювального приладу.
2. Отримати у викладача варіант завдання для оцінки точності конкретного приладу (початкові дані для розрахунків приведені в Додатку 1).
3. Побудувати криві Х(j) і Y(j), а також Δ(j) для заданих показань приладу.
3. Зміст звіту про виконану роботу
Звіт про роботу повинен містити:
1) формули, використовувані для визначення класу точності
вимірювального приладу;
2) графіки залежності Х(j) і Y(j), а також Δ(j), які демонструються на
екрані монітора.
Контрольні питання
1. Які види погрішностей вимірювання Ви знаєте? Які методи усунення погрішностей Вам відомі?
2. Як визначається приведена погрішність з урахуванням не лінійності шкали приладу?
3. Як визначається клас точності приладу?
4. Яку погрішність забезпечує прилад з класом точності 1?
5. Чи відрізняються значення погрішностей в різних точках шкали приладу і чому?
6. Чи впливає кількість вимірювань в кожній крапці (значень У) на значення погрішності і клас точності приладу?
7. Чи впливає кількість еталонних точок, в яких проводилися вимірювання, на значення погрішності і клас точності приладу?
Лабораторна робота № 3
Дослідження залежності точності і часу обчислення функцій від методів їх обчислення
Мета роботи: Оцінка погрішності і часу обчислення функцій при використанні різних методів їх знаходження.
Прилади, обладнання, інструменти: комп’ютер, прикладне програмне забезпечення, осцилограф.
1. Загальні теоретичні відомості
У деяких завданнях швидкість виконання операцій, що часто зустрічаються, є важливішою характеристикою програми, аніж точність результату. При цьому доцільно досягти деякого компромісу між двома вказаними характеристиками. До згаданих завдань можна віднести алгоритми оптимізації, машинної графіки та інші. У них доводиться обчислювати алгебраїчні, тригонометричні та інші функції.
Можна вважати, що знаходження значень функцій за допомогою стандартних засобів (модуля System або бібліотек програм), забезпечує максимальну точність. Вважатимемо такий підхід еталонним. Найбільш поширеними наближеними методами є:
• обчислення функцій за допомогою степеневих рядів;
• використання таблиць значень функцій.
Точність методів залежить в першому випадку від кількості членів ряду (n1), а в другому - від розміру таблиці (кількості значень n2 в ній).
У роботі необхідно оцінити похибку обчислення заданої викладачем функції по формулі:

де
Fеталон(x) - значення функції, знайдене еталонним методом
Fнаближ(x) - її значення, отримане наближеним методом.
Крім того, потрібно визначити час знаходження функції трьома описаними методами і побудувати графіки залежностей похибки і часу від величин n1 і n2. При цьому має бути досліджена поведінка функцій для різних значень аргументу х, що задаються викладачем (наприклад, від хпо ч до хкін з кроком hx), і побудовані графіки функції Y = F(x) на заданому інтервалі. Інтервал значень аргументу для кожного варіанту приведений в таблиці 1 додатку А.
У лабораторній роботі необхідно скласти процедури наближеного обчислення заданої викладачем функції обома методами по наступних алгоритмах.
Обчислення за допомогою рядів.
Розглянемо на прикладі функції Sin х з таблиці 1 додатку Б. Формула для обчислення функції приведена там же. Вона має вигляд:
y = F(x)=х-х3 /3!+х5 / 5!- х7 /7! +....
Метод 1 можна реалізувати за допомогою наступного алгоритму
1. Побудувати еталонний графік функції Fеталон(x), змінюючи х від хпо ч до хкін з кроком hx = (хкін - хпо ч)/ 50.
2. Для ni від 3 до 10 виконати
2.1. Прийняти х = хпо ч
2.2. Доки х <= хкін виконати
2.2.1. Попереднє = х.
2.2.2. Наступне = -х3 /6.
2.2.3. Y= попереднє.
2.2.4. n = 1.
2.2.5. Для k від 1 до ni - 1 виконати
1) Наступне = -Попереднє * х2 /((n + 1)*(n + 2))
2) Y = Y + Наступне
3) п = п +2.
2.2.6. F1n i (х) = Y.
2.2.7. x = х + h х.
2.2.8. Вивести крапку на графіку F1 з координатами, х і F1n i (х) і з'єднати її з попередньою крапкою.
2.2.9. Визначити значення погрішності для чергового ni за формулою:

Примітка. Для побудови графіка функції еталонним методом (див. п. 1 алгоритму) інтервал значень х розбивається на 50 - 100 відрізків, на межах яких обчислюються значення y за допомогою стандартних функцій мови програмування. Ці величини визначають координати х і y еталонного графіка. Точки графіка з'єднуються прямими за допомогою графічних процедур використаної мови програмування.
Знаходження значень функції за допомогою таблиць.
Інтервал значень х послідовно ділиться на 2, 3, 4 і так далі інтервали (по кількості величин п2 в таблиці). Значення функції на межах інтервалів обчислюються за допомогою еталонного методу (стандартних функцій мови програмування). При цьому всі проміжні значення вважаються такими, що належать відрізку прямої, що сполучає вказані межі (як показано на рис. 2.1).
Похибку обчислення функції можна оцінити абсолютною величиною різниці між координатою увід(х) проміжної точки х інтервалу і еталонним значенням функції в цій точці, тобто за наступною формулою:
 (3.1)
(3.1)
Де:
 - координата проміжної точки х інтервалу, віддаленої від точки x1 на величину h (рис. 3.1).
- координата проміжної точки х інтервалу, віддаленої від точки x1 на величину h (рис. 3.1).
З врахуванням отриманих співвідношень метод 2 можна реалізувати за допомогою наступного алгоритму.
1. Побудувати еталонний графік функції Fеталон(x), змінюючи х від хпо ч до хкін з кроком hx = (хкін - хпо ч)/ 50.
2. Для п 2 від 3 до 10 виконати
2.1. Прийняти X = хпо ч
2.2.Крок hx = (хкін - хпо ч)/ n 2
2.3. Визначіть y1ет(X)
2.4. Прийняти y1=y1ет(X)
2.5. Прийняти х1 = X.
2.6. Доки Х<= хкін виконати
2.6.1. Обчислити X X - hx.
2.6.2. Обчислити y2ет(X)
2.6.3. Прийняти y2= y2ет(X)
2.6.4. Прийняти х2 = X.
2.6.5. Провести відрізок від точки (х1,у1) до точки (х2,у2).
2.6.6. Змінюючи х від х1 до х2 з кроком hx / 10, обчислювати похибки δ за формулою (2.1), і знайти максимальне значення δmax
2.6.7. Прийняти х1 = X.
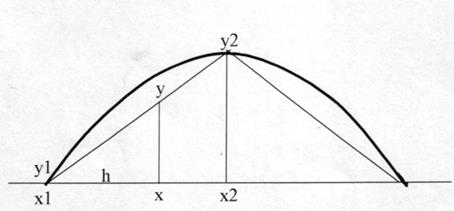
Рис. 3.1. Апроксимація функції F(х) при табличному методі
Примітка. Побудова графіка функції еталонним методом (див. п. 1 алгоритму) виконується так само, як для методу 1, розбиваючи інтервал значень х на 50- 100 інтервалів.
2. Порядок виконання роботи
1. Користуючись описаними вище алгоритмами, розробити і відлагодити програму обчислення заданої викладачем функції трьома методами: еталонним і двома наближеними.
2. Побудувати криві Fеталон(x) і Fнаближ(x) на заданому інтервалі значень х (див. Додаток 2).
3. Побудувати криві часу обчислення функції різними методами залежно від числа членів ряду пі або значень в таблиці п 2. Час обчислення визначати за допомогою системного таймера. Для зменшення похибки оцінки часу процедури знаходження функції виконувати 10000 -100000 разів.
4. Побудувати криві δmax для обчислення функції різними методами залежно від числа членів ряду п1 або значень в таблиці п2.
3. Зміст звіту про виконану роботу
Звіт про роботу повинен містити:
1) Графічне зображення заданої викладачем функції F(x) і формули, використовувані для її наближеного обчислення;
2) Максимальні значення похибок для кожного методу;
3) Графіки Fеталон(x) і Fнаближ(x) на заданому інтервалі значень х;
4) Графіки часу обчислення функції різними методами, а також δmax залежно від числа членів ряду п1 або значень в таблиці (п2).
Контрольні питання
1. Приведіть формулу для обчислення заданої Вам функції за допомогою рядів.
2. Як обчислюються значення функції при використанні табличного методу?
3. Як оцінюється похибка обчислення функції за допомогою рядів і таблиць?
4. Як визначити час обчислення функції наближеними методами?
5. Яка залежність між кількістю членів ряду і похибкою обчислення заданої функції за допомогою рядів?
6. Яка залежність між кількістю точних значень і похибкою обчислення функції за допомогою таблиць?
7. Яка залежність між кількістю членів ряду і часом обчислення функції за допомогою рядів?
8. Яка залежність між кількістю точних значень і часом обчислення функції за допомогою таблиць?
9. Яка кількість членів ряду забезпечує, на Ваш погляд, допустиму похибку при обчисленні функції за допомогою рядів?
10. Яка кількість точних значень забезпечує, на Ваш погляд, допустиму похибку при обчисленні функції за допомогою таблиць?
Лабораторна робота № 4
Дослідження точності цифро-аналогового перетворювача
Мета роботи: Постановка і проведення експерименту по вивченню впливу точності виготовлення резисторів на лінійність і точність перетворення лінійного цифро-аналогового перетворювача.
Прилади, обладнання, інструменти: комп’ютер, прикладне програмне забезпечення, ЦАП, осцилограф, частотомір.
1. Загальні теоретичні відомості
Лінійний цифро-аналоговий перетворювач (ЦАП) часто використовується в обчислювальних системах, керівників різними об'єктами і установками. Він перетворить двійковий код в напругу згідно формулі:
 (4.1)
(4.1)
де
Uоп - опорна напруга ЦАП;
R0 - опір резистора в ланцюзі зворотного зв'язку ЦАП;
xi={0,1} - значення i-того розряду перетворюваного двійкового коду;
Qi - провідність вхідного резистора в ланцюзі i-того разряду ЦАП,
Qi = 1/ Ri;
Ri - резистор i-того розряду;
 - сумарна провідність вхідних резисторів ЦАП
- сумарна провідність вхідних резисторів ЦАП
пропорційна двійковому коду X = xN… x1
Цей вираз описує роботу ідеального (еталонного) ЦАПа.
Похибка перетворення реального пристрою залежить від класу точності використовуваних елементів, зокрема резисторів R0 і Ri (провідності Qi). Номінали резисторів ЦАП вибираються із стандартного ряду. Чим вище точність резистора, тим більше номіналів містить ряд. Максимальна абсолютна погрішність ЦАП може бути визначена по наступній загальній формулі для непрямих вимірів:
 ,
,
з якої, враховуючи, що Ri=R1*21-i, і=1,...N, можна отримати простіший вираз для оцінки похибки
 (4.2)
(4.2)
Максимальна відносна приведена похибка ЦАП рівна
 %.
%.
Клас точності ЦАП визначається традиційним способом, тобто заокругленням цієї величини до найближчого більшого стандартного значення. В лабораторній роботі досліджується перетворювач, в якого величина тому для нього
 % (4.3)
% (4.3)
Вважатимемо, що є можливість підібрати для досліджуваного ЦАП резистори з класом точності γ = 0,1%, 0,5%, 1,0%, 5%, тобто ∆Ri = ∆R0 = (0.001, 0.005, 0.01, 0.05) * Rном, де Rном - номінальне значення опору.
Як приклад розглянемо чотирирозрядний ЦАП на зважених резисторах (див. Р. Токхем “Основи цифрової електроніки”), який будується на основі операційного підсилювача (див. рис. 3.1). Опорною напругою в ньому слугує напруга логічної одиниці Uоп =+5В. Для уникнення похибки заокруглення при діленні задамося Uвих мax =12В і R0 =16 КОм. Номінальні значення вхідних опорів дорівнюватимуть 100, 50, 25 і 12,5 КОм. Причому, 100 КОм відповідає молодшому, а 12,5 - старшому розряду кода.
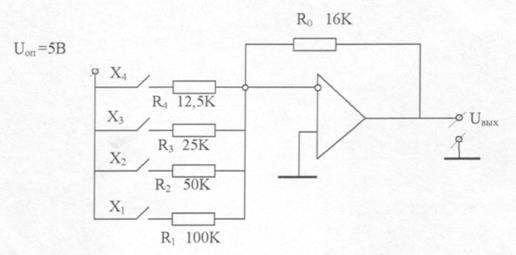
Рис. 4.1. Схема 4-розрядного ЦАП
Вочевидь, що при збільшенні перетворюваного коду на одиницю молодшого розряду, вихідний сигнал збільшуватиметься на ∆U = 0,8В. Тоді максимальному коду X = 1111 відповідатиме ідеальна величина Uвихмax =6,4+3,2+1,6+0,8=12В. Реальні значення опору вхідних резисторів і R0 можна представити випадковою величиною
R р= R ном ± ∆R, (4.4)
де R ном - номінальне значення опору зі схеми рис. 3.1;
∆R - випадкова складова абсолютної погрішності, визначувана по формулі:
∆R = R ном*Random(n)/10000,
тут Random(n) - функція, що обчислює випадкову величину з діапазону від 0 до -1,
n = 10, 50, 100 і 500 - діапазони, що відповідають класу точності виготовлення резисторів з основною погрішністю 0,1%, 0,5%, 1% і 5%.
Знак ∆R також можна задати випадковим чином, використовуючи вираз:
Знак =“+”, якщо Random(2)= 0 Знак =“-”, якщо Random(2)= 1.
Опір i -того розряду бере участь у формуванні вихідної напруги, якщо відповідна йому двійкова цифра хi = 1. Так, для коду X = 1001 мають бути включені резистори R1 і R4 Значення хi можна отримати з десяткового числа X, застосовуючи відомий алгоритм перетворення десяткових чисел в двійкові, приведений нижче.
|
|
|
|
|
Дата добавления: 2015-05-23; Просмотров: 1271; Нарушение авторских прав?; Мы поможем в написании вашей работы!