КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Введение. Расчет пространственных рам методом перемещений
|
|
|
|
Пример
Расчет пространственных рам методом перемещений
Пример
Расчет пространственных рам методом сил
Упрощения при расчете симметричных систем
Принципы расчета пространственных рам
n c=(Со+6Ж+С) – 6Т
n c = 6 n р

 .
.
 ;
;

 .
.

 .
.
GI к = EIz = EIy = EI
n c = 6∙1= 6.
δ11 X 1 + Δ1 F = 0
Nx = 0,
Qz = 0, My = 0,
Qy = 0, Mx = 0
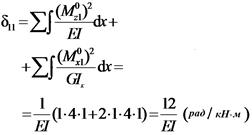
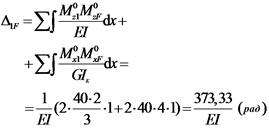
X 1 = – Δ1 F /δ11 = – 373,33/12
= – 31,11 кН·м
 .
.
n к =3 n у + n л,
n л=W = 3 У – (Сф + С оп).
n к = nу + n л = 3∙4 + 4 = 16
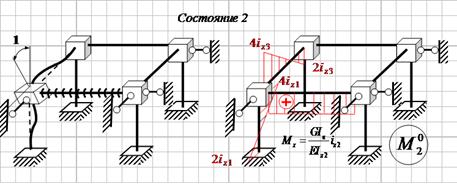



F = 106 кН; q = 29 кН/м;
GI к/ EI = 0,5; Iz = Iy = I.
Относительные жёсткости стержней рамы:
· стержни АВ и ВЕ i 1 = EI /4 = i;
· стержень BD i 2 = 2 EI /4 = 2 i;
· стержень BC i 3 = 4 EI /4 = 4 i.
n к = 3
Z 3 = 0
r 11 Z 1 + r 12 Z 2 + R 1 F = 0;
r 21 Z 1 + r 22 Z 2 + R 2 F = 0.
∑ Mz = 0;
r 11 − 4 i − 4 i − 6 i − 0,5 i = 0,
r 11 = 14,5 i (кН·м/рад)
∑ My = 0;
r 22 − 4 i −16 i − 6 i −0,5 i = 0,
r 22 = 26,5 i (кН·м/рад)
∑ Mz = 0; R 1F + 58 = 0, R 1F = − 58(кН·м);
∑ My = 0; R 2F + 53 = 0, R 2F = − 53(кН·м).
14,5 iZ 1 − 58 = 0,
26,5 iZ 2 − 53 = 0,
Z 1 = 58/14,5 i = 4/ i (рад);
Z 2 = 53/26,5 i = 2/ i (рад).
Цель курса состоит в изучении принципов автоматического управления, типов систем автоматического управления, используемых в технике, математического аппарата исследования линейных САУ, основных элементов и характеристик САУ, методов анализа САУ на устойчивость и качество управления, способов корректировки свойств линейных САУ.
Данный курс предназначен для студентов, обучающихся по специальности "Электромеханика", для которых ТАУ не является профилирующим предметом. Поэтому особое внимание уделено принципам анализа дифференциальных уравнений, описывающих переходные процессы в любых технических системах, в том числе и в электрических машинах. В то же время студенты знакомятся с основными положениями науки, изучающей принципы использования электрических машин в регулируемых приводах.
Литература, рекомендуемая для изучения:
- Теория автоматического управления. Учеб. для вузов по спец. "Автоматика и телемеханика". В 2-х ч./ Н.А. Бабаков, А.А. Воронов и др.: Под ред. А.А. Воронова. - 2-е изд., перераб. и доп. - М.: Высш. шк., 1986. - 367с., ил.
- Егоров К.В. Основы теории автоматического регулирования, учебное пособие для вузов, изд. 2-е, перераб. и доп., - М.: "Энергия", 1967. - 648с., ил.
- Куропаткин П.В. Теория автоматического управления. Учеб. пособие для электротехн. спец. вузов. - М.: "Высшая школа", 1973. - 528с., ил.
- Основы линейной теории автоматического управления в задачах электроэнергетики: Учебное пособие к компьютерным лабораторным практикумом АОС-ТАУ/ В.Ф. Коротков; Иван. гос. энерг. ун-т. - Иваново, 1994. - 392с.
Список понятий, знание которых необходимо на момент начала изучения курса
- Принципиальная схема технического устройства.
- Статический и динамический режимы работы технических устройств.
- Логарифмирование.
- Операции с комплексными числами и функциями.
- Операции с векторами.
- Линейная и нелинейная функции одной и нескольких переменных.
- Графическое сложение функций.
- Нахождение корней полинома.
- Разложение функции в ряд Тейлора.
- Разложение функции в ряд Фурье.
- Дифференцирование и интегрирование функций.
- Решение линейных дифференциальных уравнений классическим методом.
- Решение дифференциальных уравнений в операционном исчислении.
- Методы расчета электрических цепей в установившемся и переходном режимах.
- Электрическая машина постоянного тока.
|
|
|
|
Дата добавления: 2015-05-09; Просмотров: 845; Нарушение авторских прав?; Мы поможем в написании вашей работы!