КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Фильтр и динамическая погрешность
|
|
|
|
Измеряемая величина в системах автоматизации обычно не является постоянной во времени. Поэтому возникает вопрос, насколько медленно она должна изменяться, чтобы погрешность измерения не превышала заданного значения. Для ответа на этот вопрос используется понятие динамической погрешности.
Нормированию динамических погрешностей уделено недостаточно внимания как в нормативной литературе, так и в эксплуатационной документации средств измерений. Так, динамические характеристики, необходимые для оценки динамической погрешности. как правило, отсутствуют в пользовательской документации на модули аналогового ввода, за редким исключением.
Оценка величины динамической погрешности является сравнительно сложным процессом. Проблема возникает потому, что динамическая погрешность зависит не только от динамической модели измерительного канала, но и от формы измеряемого сигнала.
Основными источниками динамической погрешности являются естественная инерционность физических процессов, протекающих в датчиках, процессы заряда входной емкости измерительного устройства, инерционность фильтров, использованных для устранения алиасного эффекта и подавления помех в измерительном канале.
Для количественного описания динамических свойств измерительного канала используют линейные динамические модели в виде дифференциальных уравнений, операторных передаточных функций, импульсных переходных характеристик или реакций на единичный скачок, амплитудно-частотные и амплитудно-фазовые характеристики (ГОСТ 8.256). Описание этих моделей может быть указано в эксплуатационной документации на средство измерений. Идентификацию динамической модели средства измерений выполняет его разработчик, используя те же методы, что и при идентификации объекта управления.
В некоторых случаях, например, когда уравнения динамической модели пользователю известны, могут быть заданы только коэффициенты уравнений, постоянные времени, время реакции (время установления), коэффициент демпфирования, полоса пропускания по уровню 0,707 и др.
Для модулей аналогового ввода может быть также задана погрешность положения отсчета измеряемого сигнала на оси времени.
Рассмотрим типовую динамическую модель измерительного канала (рис. 3), которая включает в себя модели датчика  и модуля ввода аналоговых сигналов
и модуля ввода аналоговых сигналов  . Передаточная функция обычно представляет собой произведение передаточных функций антиалиасного фильтра (стоящего до АЦП) и цифрового режекторного фильтра после АЦП. Измерительный преобразователь часто входит в состав модуля ввода.
. Передаточная функция обычно представляет собой произведение передаточных функций антиалиасного фильтра (стоящего до АЦП) и цифрового режекторного фильтра после АЦП. Измерительный преобразователь часто входит в состав модуля ввода.
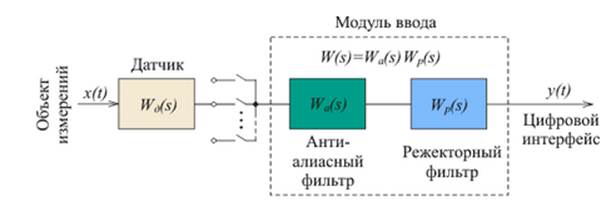
Рис.3- Динамическая модель измерительного канала.
При проектировании системы автоматизации динамические характеристики ее звеньев можно выбрать так, что инерционность всего измерительного канала будет определяться инерционностью самого медленного звена. Это существенно упрощает процесс оценки величины динамической погрешности. Например, при измерении температуры самым инерционным звеном должен быть датчик (инерционность термопар характеризуется постоянной времени десятки секунд и намного превышает инерционность модуля ввода (доли секунды)).
Многоканальные средства измерений бывают двух типов: с коммутацией источников сигнала и с параллельно работающими каналами. В первом случае на входе модуля ввода используется аналоговый коммутатор (рис. 1), во втором случае коммутатор не используется, а многоканальность достигается применением нескольких одинаковых каналов с одновременно работающими АЦП.
В системе с параллельно работающими каналами можно считать, что сигнал на входе средства измерений действует неограниченно долго. При коммутации каналов сигнал объекта измерений  действует, пока ключ коммутатора замкнут. Описание динамической погрешности этих двух типов систем имеет свои особенности.
действует, пока ключ коммутатора замкнут. Описание динамической погрешности этих двух типов систем имеет свои особенности.
Список использованной литературы.
ГОСТ 8.256
Интернет ресурс.
http://www.bookasutp.ru/Chapter4_3.aspx
http://knowledge.allbest.ru/physics.html
http://ru.wikipedia.org/wiki/%C8%E7%EC%E5%F0%E5%ED%E8%E5
http://abc.vvsu.ru/Books/metrolog_standar_i_sertif/page0006.asp
|
|
|
|
|
Дата добавления: 2015-05-10; Просмотров: 463; Нарушение авторских прав?; Мы поможем в написании вашей работы!