КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Перемещение, скорость и ускорение поршня в КШМ
|
|
|
|
Кинематика КШМ
Кинематика и динамика КШМ.
Рабочий цикл, совершаемый в двигателе осуществляется с целью получения положительной энергии для ее дальнейшей передачи другим потребителям (автомобилю, трактору, генератору и т.д.). Наиболее распространенный способ передачи механической энергии потребителям через вращающиеся валы за счет крутящего момента.
В разделе кинематики КШМ описываются соотношения и зависимости перемещений, скоростей и поршя КШМ от угла поворота кривошипа.
Общий вид КШМ приведен на рисунке. Он описывается следующими параметрами:
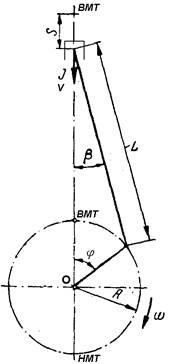
| Кинематические параметры КШМ: S - перемещение поршня (начало отсчета от ВМТ) V- скорость поршня f(j) J - ускорение поршня j - угол поворота кривошипа (начало отсчета от ВМТ) w - частота вращения кривошипа Конструктивные параметры КШМ: R - радиус кривошипа L- длина шатуна lк = R/L (составляет 0,23…0,33) – постоянная КШМ b - угол отклонения шатуна от вертикали. е - смещение оси поршневого пальца от вертикальной плоскости оси вала (за счет смещения оси цилиндра от оси вала или оси пальца от оси поршня). Если е=0 механизм называется аксиальным. Если е>0 механизм становится дезаксиальным. |
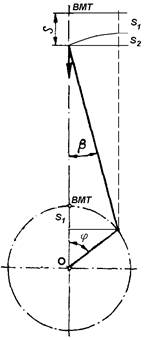
| S = S1 + S2 S1 – перемещение поршня из-за поворота на угол поворота кривошипа S2 - перемещение поршня за счет отклонения шатуна на угол b Закон перемещения определяется перемещением кривошипа и отклонением шатуна. |
| S1 = R (1 - cosj) S2» R l/4 (1 - cos2j). S = R [(1 - cosj) + l/4 (1 - cos2j)] S1 – изменяемая с частотой вращения кривошипа (первая гармоника) S2 – изменяемая с двойной частотой (двойная гармоника) |
Скорость V1 = dS1/dt и w= dj/dt → V = R w (sin j + l/2 sin2j)
Ускорение поршня J = dV/dt
J = R w2 (cos j + l cos2j)
|
|
|
|
|
Дата добавления: 2015-05-10; Просмотров: 2196; Нарушение авторских прав?; Мы поможем в написании вашей работы!