КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Порядок выполнения работы
|
|
|
|
Цель работы
1.1 Приобрести навыки выбора типа электропривода
1.2 Произвести расчет нагрузочной диаграммы двигателя
1.3 Научиться производить предварительный выбор двигателя
1.4 Произвести проверку двигателя по нагреву
2.1 Грузовой лифт установлен в четырехэтажном производственном здании, служит для опускания готовой продукции в контейнерах, закатываемых в кабину, а также для транспортировки полуфабрикатов в контейнерах, между этажами и подачи порожних контейнеров. Полуфабрикаты изделий не допускают чрезмерных динамических нагрузок при транспортировании, из-за чего должно быть ограничено максимальное ускорение кабины. Кабина лифта уравновешивается противовесом через канат на канатоведущем шкиве трения, который приводится через редуктор от одного или двух двигателей.
Требования к электроприводу.
Для грузового лифта выбрать тип электропривода, выполнить выбор электродвигателя и его проверку по нагреву. К электроприводу предъявляются следующие требования:
1. Обеспечение работы механизма по следующему циклу:
· опускание кабины с четвертого этажа на первый этаж;
· стоянка на первом этаже (двигатель отключен);
· подъем кабины с первого этажа на второй этаж;
· стоянка на втором этаже (двигатель отключен);
· подъем кабины со второго этажа на третий этаж;
· стоянка на третьем этаже (двигатель отключен);
· подъем кабины с третьего этажа на четвертый этаж;
· стоянка на четвертом этаже (двигатель отключен).
2. Обеспечение рекуперации энергии в тормозных режимах.
3. Разгоны и замедления должны проходить с постоянным ускорением, не превышающим заданной максимально-допустимой величины.
4. Статическая ошибка по скорости при подъеме и спуске грузов не должна превышать 10%.
5. Система управления должна обеспечить ограничение тока и момента двигателя при механических перегрузках.
Современный электрифицированный механизм рассматривается как электромеханическая автоматизированная (или в целом автоматическая) система, замкнутая обратными связями (через оператора или специальное техническое устройство) по контролю основополагающих технических параметров. В главном (силовом) канале обязательно присутствует электродвигатель, а также могут быть представлены преобразователи электрической и механической энергии. С их помощью и реализуются конкретные законы электромеханического энергообразования.
Каналы управляющих воздействий на различные функциональные элементы силовой цепи, а также каналы обратной связи входят в состав системы автоматического управления (САУ) электропривода.
2.2 Выбор типа электропривода
При выборе системы электропривода и рода тока, прежде всего, учитывается условие работы производственного механизма. Высокая производительность и качество выпускаемой продукции могут быть обеспечены лишь при правильном учете статических и динамических характеристик привода и рабочей машины. Кинематика, и даже конструкция рабочей машины в значительной мере определяются типом применяемой ЭП, и, наоборот, в зависимости от конструктивных особенностей исполнительного механизма привод претерпевает значительные изменения.
При выборе типа ЭП должны быть учтены: характер статического момента; необходимые пределы регулирования скорости; плавности регулирования требуемых механических характеристик, условий пуска и торможения, числа включений в час, качество окружающей среды и т.д. Для электропривода грузового лифта возможно использование следующих ЭП:
«ТПЧ-АД» (тиристорный преобразователь частоты – асинхронный двигатель), «Г-Д» (генератор - двигатель), «ТП-Д» (тиристорный преобразователь – двигатель).
Система «ТПЧ-АД» в принципе позволяет получить характеристики, аналогичные «ТП-Д», но стоимость тиристорного преобразователя частоты гораздо выше управляемого выпрямителя.
К недостаткам системы «Г-Д» относят:
- необходимость в двухкратном преобразовании энергии (на электрической энергии переменного тока в механическую, и из механической вновь в электрическую постоянного тока, регулируемого напряжения), что приводит к значительному снижению КПД;
- наличие двух машин в преобразовательном агрегате, установленная мощность каждой, если пренебречь потерям в машине, равна установленной мощности регулируемого движения;
- значительные габариты и масса установки. Необходимость в фундаменте для преобразовательного агрегата;
- высокие капитальные и эксплуатационные расходы;
- с целью форсировки переходных процессов возникает необходимость использования повышенного (в несколько раз  ) напряжение.
) напряжение.
Для ЭП грузового лифта принимаем систему «ТП-Д» с реверсированием напряжения на якоре двигателя, возможно изменения вращения двигателя в реверсивном приводе также за счет изменения направления тока в цепи возбуждения двигателя, когда в цепи якоря используется нереверсивный управляемый выпрямитель. Эта схема проще и дешевле двухкомплектного преобразователя на якоре, но уступает по динамическим показателям из-за сравнительно большой постоянной времени обмоток возбуждения (см. рисунок 1).
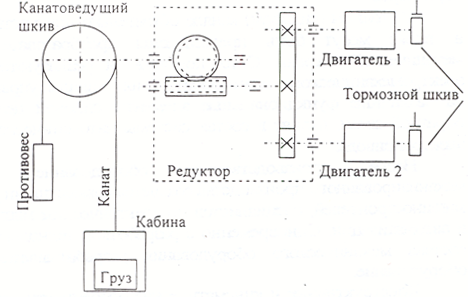
Рисунок 1 – Кинематическая схема механизма (грузовой лифт)
Таблица 1 – Исходные данные
| Параметр | Обозначение | Значение |
| Масса кабины | 
| кг |
| Номинальная грузоподъемность лифта | 
| кг |
| Скорость движения кабины | 
| м/с |
| Радиус канатоведущего шкива | 
| м |
| Момент инерции канатоведущего шкива | 
| кг · м2 |
| Максимально допустимое ускорение кабины | 
| м/с2 |
| Продолжительность включения | 
| % |
| Масса груза при движении с четвертого этажа на первый (4→ 1) | 
| кг |
| Масса груза (1→ 2) | 
| кг |
| Масса груза (2→ 3) | 
| кг |
| Масса груза (3→ 4) | 
| кг |
| Полная высота подъема | 
| м |
| Число этажей | 
| |
| Коэффициент трения лифта о направляющие | 
| |
| КПД механических передач | 
|
2.3 Выбор и проверка электродвигателя
2.3.1 Расчет нагрузочной диаграммы механизма
Для предварительного выбора двигателя рассчитаем массу противовеса и построим нагрузочную диаграмму механизма см. рисунок 2 (график статических нагрузок механизма). Расчет времени участков цикла на этапе предварительного выбора двигателя выполняем приблизительно, т.к. пока нельзя определить время разгонов и замедлений (суммарный момент инерции привода до выбора двигателя неизвестен).
Масса противовеса:

|
Активные составляющие момента статического сопротивления на канатоведущем шкиве:

|

|

|

|
Реактивные составляющие момента статического сопротивления на канатоведущем шкиве:

| ||

| ||

| ||

|
Моменты статического сопротивления на канатоведущем шкиве:

| (тормозной режим) |

| (двигательный режим) |

| (двигательный режим) |

| (тормозной режим) |
Угловая скорость канатоведущего шкива:
|
Расстояние между этажами:
|
Время движения при перемещении на 3 этажа (приблизительно):
|
Время движения при перемещении на 1 этаж (приблизительно):
|
Время работы в цикле (приблизительно):
|
Время стоянки на этаже (приблизительно):

|
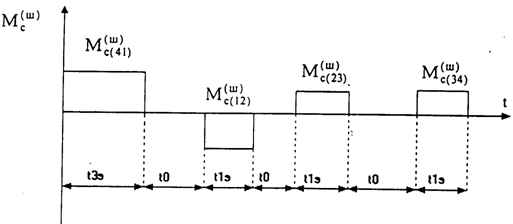
Рисунок 2 – Вид нагрузочной диаграммы механизма
Предварительный выбор двигателя
Ориентируемся на выбор двигателя серии  , рассчитанного на номинальный повторно-кратковременный режим работы с
, рассчитанного на номинальный повторно-кратковременный режим работы с  40%.
40%.
Эквивалентный статический момент на канатоведущем шкиве за время работы в цикле (с учетом потерь в передачах):

Учет влияния потерь в передачах выполняется подстановкой значений:
 - в тормозном режиме (знаки момента и скорости различны);
- в тормозном режиме (знаки момента и скорости различны);
 - в двигательном режиме (знаки момента и скорости одинаковы).
- в двигательном режиме (знаки момента и скорости одинаковы).
| |
|
| |
|
Расчетная мощность двигателя:
|
где  - коэффициент запаса (принимаем
- коэффициент запаса (принимаем  1,2).
1,2).
Выбираем двигатель. Номинальные данные эквивалентного двигателя приводим в таблице 2.
Таблица 2 – Данные выбранного двигателя
| Параметр | Обозначение | Значение |
| Мощность номинальная, кВт | 
| |
| Номинальное напряжение якоря, В | 
| |
| Номинальный ток якоря, А | 
| |
| Номинальная частота вращения, об/мин | 
| |
| Максимально допустимый момент, Нм | 
| |
| Сопротивление обмотки якоря (Т=20оС), Ом | 
| |
| Сопротивление обмотки доб.полюсов (Т=20оС), Ом | 
| |
| Момент инерции якоря двигателя, кг · м2 | 
| |
| Число пар полюсов | 
| |
| Максимально допустимый коэффициент пульсаций тока якоря | 
|
Принимаем параллельное соединение якорей двух двигателей. Определим эквивалентные данные:
Мощность номинальная: PN=2× PN______________________________________________
Момент инерции: Jд=2×Jд______________________________________________________
Номинальная частота вращения: nN= nN=_______________________________________
Максимально допустимый момент: Mmax=2× Mmax_________________________________
Максимально допустимый коэффициент пульсаций тока якоря:
| k1(доп)= k1(доп)= |
Обмотки двух двигателей соединим параллельно тогда, номинальное напряжение якоря: UяN= UяN=___________________________________________________________________
Номинальный ток якоря: IяN=2× IяN______________________________________________
Сопротивление обмотки якоря: Rяо=____________________________________________
Сопротивление обмотки добавочных полюсов: Rд.п=0,5×Rд.п=_______________________
Составим таблицу полученных эквивалентных параметров.
Таблица 3 – Данные выбранного двигателя
| Параметр | Обозначение | Значение |
| Мощность номинальная, кВт |
| |
| Номинальное напряжение якоря, В |
| |
| Номинальный ток якоря, А |
| |
| Номинальная частота вращения, об/мин |
| |
| Максимально допустимый момент, Н · м |
| |
| Сопротивление обмотки якоря (Т=20оС), Ом |
| |
| Сопротивление обмотки доб.полюсов (Т=20оС), Ом |
| |
| Момент инерции якоря двигателя, кг · м2 |
| |
| Число пар полюсов |
| |
| Максимально допустимый коэффициент пульсаций тока якоря |
|
Двигатель серии - некомпенсированный, с естественным охлаждением и изоляцией класса  . Для дальнейших расчетов потребуются ряд данных, которые не приведены в справочнике. Выполним расчет недостающих данных двигателя.
. Для дальнейших расчетов потребуются ряд данных, которые не приведены в справочнике. Выполним расчет недостающих данных двигателя.
Сопротивление цепи якоря двигателя, приведенное к рабочей температуре:

|
где  - коэффициент увеличения сопротивления при нагреве до рабочей температур
- коэффициент увеличения сопротивления при нагреве до рабочей температур
( = 1,38 для изоляции класса при пересчете от 20оС).
Номинальная ЭДС якоря: 
 __________________________________
__________________________________
Номинальная угловая скорость:  __________________________________
__________________________________
Конструктивная постоянная двигателя, умноженная на номинальный магнитный поток:  _______________________________________________________________
_______________________________________________________________
Номинальный момент двигателя:  _______________________________
_______________________________
Момент холостого хода двигателя:  ____________________________
____________________________
Индуктивность цепи якоря двигателя:  ___________________________
___________________________
где коэффициент  равен 0,2 для компенсированного двигателя и 0,6 для некомпенсированного.
равен 0,2 для компенсированного двигателя и 0,6 для некомпенсированного.
2.3.2 Расчет нагрузочной диаграммы двигателя
Для проверки выбранного двигателя по нагреву выполним построение упрощенной нагрузочной диаграммы двигателя (без учета электромагнитных переходных процессов). Для построения нагрузочной диаграммы произведем расчет передаточного числа редуктора, приведение моментов статического сопротивления и рабочих скоростей к валу двигателя, примем динамический момент и ускорение электропривода с учетом перегрузочной способности двигателя и заданного допустимого ускорения.
Передаточное число редуктора:  ____________________________________
____________________________________
Моменты статического сопротивления, приведенные к валу двигателя:
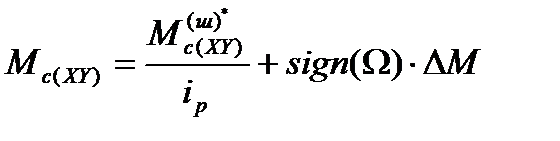 , для XY = 41, 12, 23, 34,
, для XY = 41, 12, 23, 34,
где  - функция знака скорости:
- функция знака скорости:
 = 1 – при подъеме;
= 1 – при подъеме;
= -1 – при спуске.
| 
|
| 
|
Суммарный момент инерции привода:
 _______________________________________
_______________________________________
где  - коэффициент, учитывающий моменты инерции полумуфт и редуктора (принимаем равным 1,2).
- коэффициент, учитывающий моменты инерции полумуфт и редуктора (принимаем равным 1,2).
Примечание: считаем, что момент инерции не зависит от массы груза в кабине, поэтому подставляем в формулу массу номинального груза.
Модуль динамического момента двигателя по условию максимального использования двигателя по перегрузочной способности:

|
где  = 0,95 – коэффициент, учитывающий перерегулирование момента на уточненной нагрузочной диаграмме (построенной с учетом электромагнитной инерции цепи якоря);
= 0,95 – коэффициент, учитывающий перерегулирование момента на уточненной нагрузочной диаграмме (построенной с учетом электромагнитной инерции цепи якоря);
 - максимальный по модулю статический момент, приведенный к валу двигателя.
- максимальный по модулю статический момент, приведенный к валу двигателя.
Ускорение вала двигателя в переходных режимах:  ______________________
______________________
Ускорение кабины лифта:  ___________________________________________
___________________________________________
Ускорение кабины лифта менее максимально-допустимого. Разбиваем нагрузочную диаграмму на 16 интервалов: 4, 8, 12, 16 – интервалы пауз; 1, 5, 9, 13 – интервалы разгона; 3, 7, 11, 15 – интервалы замедления; 2, 6, 10, 14 – интервалы работы с установившейся скоростью.
Продолжительность интервалов разгона-замедления:
 ____________________________________
____________________________________
Путь кабины при разгоне-замедлении:  ______________________________
______________________________
Путь кабины при перемещении на 3 этажа, пройденный на постоянной скорости:

|
Путь кабины при перемещении на 1 этаж, пройденный на постоянной скорости:

|
Время движения с постоянной скоростью при перемещении на 3 этажа:
|
Время движения с постоянной скоростью при перемещении на 1 этаж:

|
Время работы в цикле:

|
Время стоянки на этаже:

|
Моменты двигателя на интервалах разгона:
 ___________________________________________________________
___________________________________________________________
 __________________________________________________________
__________________________________________________________
 ________________
________________  _______________________
_______________________
Моменты двигателя на интервалах замедления:
 _________________
_________________  _______________________
_______________________
 ________________
________________  ________________________
________________________
Моменты двигателя на интервалах движения с постоянной скоростью:
 ______________________
______________________  _______________________________
_______________________________
 ______________________
______________________  ______________________________
______________________________
По результатам расчета строится нагрузочная диаграмма и тахограмма двигателя (см. рисунок 2)
2.3.3 Проверка двигателя по нагреву
Для проверки выбранного двигателя по нагреву используем метод эквивалентного момента. Используя нагрузочную диаграмму, находим эквивалентный по нагреву момент за время работы в цикле. Затем приводим эквивалентный момент к номинальной продолжительности включения двигателя. Для нормального теплового состояния двигателя необходимо, чтобы приведенный к номинальной ПВ эквивалентный момент был не больше номинального момента двигателя.
Эквивалентный момент за время работы в цикле (по нагрузочной диаграмме):
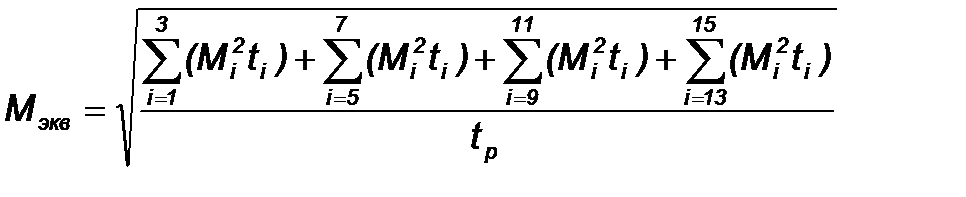 ________________________________
________________________________
Приведенный к номинальной ПВ эквивалентный момент:
 ________________________________________________________
________________________________________________________
Так как условие  выполняется (
выполняется ( ________ Нм), то выбранный двигатель проходит по нагреву.
________ Нм), то выбранный двигатель проходит по нагреву.
Запас по нагреву:  . Запас более ____ %.
. Запас более ____ %.
3 Контрольные вопросы:
3.1 Какие требования предъявляются к электроприводу?
3.2 От чего зависит выбор типа электропривода?
3.3 Для чего необходим расчет нагрузочной диаграммы двигателя?
3.4 Как произвести проверку двигателя по нагреву?
4 Вывод:
|
|
|
|
Дата добавления: 2015-05-26; Просмотров: 827; Нарушение авторских прав?; Мы поможем в написании вашей работы!