КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Общие принципы построения систем ЧПУ. Признаки нового поколения систем ЧПУ
|
|
|
|
Лекция 16
Очередная смена поколений существенно меняет потребительские свойства, структуру, архитектуру и математическое обеспечение систем ЧПУ. Огромный опыт, накопленный в области ЧПУ мехатронными системами, серьезно пересматривается под давлением производителей мехатронного оборудования и конечных его пользователей. В свою очередь производители систем ЧПУ прекрасно понимают, что простая эволюция традиционных решений приведет к потере рынка и полному их забвению. Внешние причины подобной ситуации состоят в увеличении разнообразия мехат- ронных систем, ориентированных на решение специфических задач (разнообразные технологические машины, роботы, испытательные стенды и др.), расширение зоны активности оператора мехатронного оборудования, росте привлекательности персональных систем ЧПУ типа PCNC. Однако есть и глубинная внутренняя причина - внедрение новой объектно-ориентированной технологии, без которой создание мультимегабайтного программного обеспечения систем ЧПУ просто невозможно. Подобную технологию используют не только на уровне программирования (для повышения надежности и обозримости математического обеспечения), но и на уровне макропроектирования системы: основные модули определяют как «вложенные объекты», отношения между которыми носят клиент-серверный характер. Одним из вариантов общего решения является выделение глобального сервера-программной (виртуальной) шины, которая служит основным средством межмодульной коммуникации.
Принципиальной особенностью системы ЧПУ типа PCNC является использование открытой архитектуры, которая предполагает:
• конфигурирование системы у производителя мехатронного оборудования и конечного пользователя;
|
|
|
• интеграцию покупных программных пакетов;
• эволюцию системы в условиях максимальной независимости от изменений системной платформы;
• доступ к информации любого модуля, в том числе к диагностической информации самой мехатронной системы;
• подключение к внешней сетевой коммуникационной среде;
• использование в архитектуре системы принципов системной интеграции.
Остановимся более подробно на использовании принципов системной интеграции.
Известны принципы реализации тотального информационного сервиса на уровне предприятия, когда интегрируют многочисленные приложения и коммерческие инструментальные средства (базы данных, CAD-CAM системы и др.), чтобы собрать целостную систему. При правильной организации системной интеграции внимание концентрируют на доступе к данным, но не на структурах и типах этих данных.
Таким образом, возникает проблема доступа приложений к данным любого компонента производственной системы. Трудности состоят в бесконечном множестве коммерческих и пользовательских приложений, располагающих собственными интерфейсами и написанных на различных языках программирования. Трудности могут быть преодолены на основе концепции OLE/COM компании Microsoft. Эта концепция была использована при разработке европейского проекта ОРС. Цель проекта состояла в определении стандартной клиент-серверной архитектуры и спецификаций СОМ-интерфейсов, обеспечивающих унифицированный доступ к данным, независимо от их типа и структуры. Таким образом, акцент был сделан на интеграцию, построенную на передаче данных (в том числе управляющих состояниями), а не на прямом управлении компонентами системы.
Обратимся теперь к области ЧПУ мехатронными системами. Основная задача при разработке систем типа PCNC нового поколения состоит в наиболее полном использовании принципов открытой архитектуры. Международные программы OSACA и другие не справились до конца с этой проблемой. Между тем ее решение состоит в использовании лучших достижений системной интеграции больших систем. В самом деле, математическое обеспечение системы ЧПУ содержит оригинальные программные компоненты производителя, компоненты, заказанные у других компаний, готовые коммерческие продукты, компоненты заказчика и конечного пользователя. При этом система должна сохранять все признаки открытой архитектуры. В архитектуре PCNC с неменьшим успехом могут бьггь использованы принципы OLE/COM и некоторые спецификации ОРС, как при разработке отдельных модулей, так и на уровне макропроектирования всей системы в целом.
|
|
|
Модульная архитектура систем ЧПУна прикладном уровне
Архитектура на прикладном уровне определяется количеством и составом прикладных разделов, называемых задачами управления. В числе подобных задач можно упомянуть:
• геометрическую, ориентированную на управление следящими приводами;
• логическую, организующую управление электроавтоматикой;
• технологическую, гарантирующую поддержание или оптимизацию параметров технологического процесса;
• диспетчеризации, обеспечивающую управление другими задачами на прикладном уровне;
• терминальную, поддерживающую диалог с оператором, отображение состояний системы, редактирование и верификацию управляющих программ.
Структура системы ЧПУ (рисунок 4.8) представляет собой совокупность базовых модулей (обведены сплошными линиями) и дополнительных модулей (обведены пунктирными линиями). Модули закреплены за задачами управления. К дополнительным модулям отнесены коммерческие приложения. Модуль автономен и является вложенным объектом: он рас полагает собственными алгоритмической структурой, структурой данных и интерфейсной оболочкой для работы в клиент-серверной среде. Общая структура представлена NC-подсистемой (Numerical Control) и РС-подси- стемой (Personal Computer). Первая формирует среду для ЧПУ ориентированных модулей, работающих в реальном времени, и (возможно) для специальных приложений пользователя. Вторая подсистема образует среду Windows-образного интерфейса пользователя и включает инструментальную систему подготовки и тестирования управляющих программ, а также (возможно) другие специальные приложения.
|
|
|
Взаимодействие модулей осуществляется посредством программной объектно-ориентированной магистрали, которая не только поддерживает коммуникационные протоколы, но и выполняет серверные функции. Это значит, что магистраль является глобальным механизмом предоставления модулям информационных услуг. Такая возможность отражена и в самих интерфейсах модулей: они могут предоставлять данные, запрашивать данные, управлять состояниями других модулей. Запрос данных осуществляется синхронным, асинхронным способами или по событию. Выбор механизма запроса зависит от конкретной задачи. При синхронном запросе клиент (модуль, осуществляющий запрос) останавливается в точке запроса и ждет до истечения тайм-аута ответа от сервера (модуля, обслуживающего запрос). При асинхронном запросе клиент продолжает свою работу, а обработка ответа, независимо от времени его получения, выполняется специальной функцией (callback-функцией); ее работа напоминает механизм обработки прерывания. Запрос по событию (синхронный, асинхронный) означает, что ответ будет получен только после изменения данных.
Структура, представленная на рисунке 4.8, обозначает набор модулей, позволяет специфицировать их интерфейсы, выявляет типы запросов, помогает составить техническое задание на объектно-ориентированную магистраль.
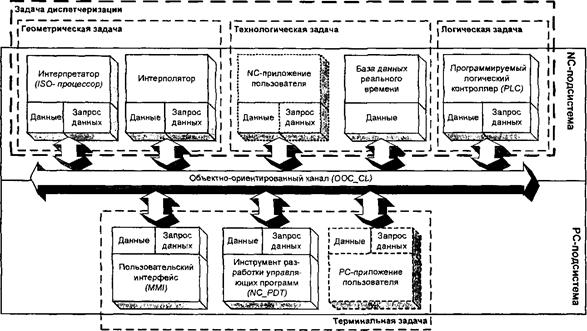
Рисунок 4.8- Модульная архитектура системы ЧПУ типа PCNC и задачи управления
Открытая архитектура систем управления
Гибкие и наиболее сложные системы ЧПУ с открытой архитектурой выполняют согласно двухкомпьютерной архитектурной модели. По мере роста вычислительной мощности компьютеров все более привлекательным становится однокомпьютерный вариант.
Двухкомпьютерная модель предполагает размещение РС-подсистемы на одном компьютере, а NC-подсистемы - на другом. В РС-подсистеме наиболее целесообразна операционная система Windows NT, а в NC-под- системе - операционная система реального времени UNIX. Обе операционные системы совместимы в том смысле, что поддерживают коммуникационные протоколы TCP/IP. Это позволяет построить коммуникационную среду, объединяющую подсистемы. Включение в эту среду прикладного уровня с функциями доступа к интерфейсам модулей (а общее число таких функций может достигать нескольких сот) создает виртуальную шину, оказывающую низкоуровневые услуги доступа. Объектная надстройка в шине формирует глобальный сервер, т.е. единую для обеих подсистем объектно-ориентированную магистраль.
|
|
|
Однокомпьютерная модель предполагает использование традиционного компьютера, оснащенного дополнительными контроллерами для связи с мехатронными объектами управления. В их числе могут быть контроллер следящих приводов, программируемый контроллер PLC (Programmable Logic Controller), специальные устройства для управления технологическими процессами и др. В качестве операционной может быть использована система Windows NT, которая, однако, не является системой реального времени и в этой связи требует соответствующего расширения, например в виде системы RTX 4.1 американской фирмы VentureCom.
Система RTX (Real Time eXtention) модифицирует слой HAL (Hardware Abstraction Layer) операционной системы Windows NT и дополняет его диспетчером потоков (threads) реального времени. Диспетчер изолирует прерывания, позволяя строить приложения реального времени, о существовании которых любые другие приложения не подозревают.
Подсистема реального времени RTSS (Real-Time Sub-System) выполняет собственные функции и осуществляет управление ресурсами RTX. Подсистема RTSS реализована в виде драйвера Windows NT, служит дополнением к операционной системе и использует сервисы Windows NT и HAL для работы подсистемы реального времени отдельно от любых других приложений. При этом обычные приложения «видят» подсистему реального времени как устройство (устройства).
Другими компонентами системного уровня являются ядро и драйверы Windows NT. На интерфейсном уровне прикладные программные интерфейсы Win32 и RTX похожи; в них реализованы функции, необходимые соответственно для создания обычных приложений и приложений реального времени.
Разработанную с использованием RTX программу можно отлаживать и запускать также в среде Win32. Однако в RTX есть функции, не имеющие аналогов в Win32, например функции работы с прерываниями.
Архитектурные варианты, показанные выше, дают общее представление о принципах открытой архитектуры применительно к ЧПУ: четкое разграничение между системным, прикладным и коммуникационным компонентами; возможность независимого развития любого из этих компонентов как на основе оригинальных разработок, так и путем встраивания покупных программных систем; клиент-серверная организация взаимодействия подсистем; стандартизация интерфейсов и транзакций
|
|
|
|
|
Дата добавления: 2015-05-26; Просмотров: 715; Нарушение авторских прав?; Мы поможем в написании вашей работы!