КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Электропривод с тиристорным регулятором напряжения
|
|
|
|
Тиристорный регулятор напряжения
Операционные усилители
ОУ – усилитель электрических сигналов, изготовленные в виде интегральной микросхемы с непосредственными связями(УПТ)2.4.1 и предназначенные для выполнения различных операций над аналоговыми сигналами при работе в цепях с ООС.
Рис.2-16 Схемное обозначение ОУ
Наряду с преобразователями частоты в регулируемом асинхронном электроприводе иногда используется тиристорный регулятор напряжения (ТРН) (рис. 3.17). Он изменяет амплитуду напряжения, подводимого к статору без изменения частоты, и используется главным образом для управления пуском (мягкие пускатели) и осуществления ряда других полезных функций.
Принцип действия тиристорного регулятора напряжения рассмотрим на примере регулирования напряжения на однофазной нагрузке переменного тока zн с помощью однофазного ТРН. Силовая часть ТРН (рис. 3.17, а) образована двумя тиристорами VS1 и VS2, включенными в цепь нагрузки по встречно-параллельной схеме, которая обеспечивает протекание тока в нагрузке в оба полупериода напряжения сети U1. Управление тиристорами осуществляется с помощью системы импульсно-фазового управления (СИФУ), которая подает на тиристоры импульсы управления Uα и обеспечивает их сдвиг на угол управления а в соответствии с величиной внешнего сигнала управления Uy.
Если на тиристоры VS1 и VS2 не подаются импульсы управления от СИФУ, то они закрыты и напряжение на нагрузке Uper равно нулю. При подаче на тиристоры импульсов управления в момент их естественного открывания (угол управления α = 0) они полностью откроются (рис. 3.17, б) и к нагрузке будет приложено нее напряжение сети U1 = Uper за вычетом небольшого (1...3 В) падения напряжения на тиристорах.
Если осуществлять подачу импульсов управления на тиристоры с некоторой задержкой относительно момента их естественного открытия (угол управления α ≠ 0), то к нагрузке будет прикладываться часть напряжения сети (рис. 3.17, б). Изменяя угол управления α от нуля до π, можно регулировать напряжение на нагрузке от полного напряжения сети до нуля при неизменной частоте этого напряжения.
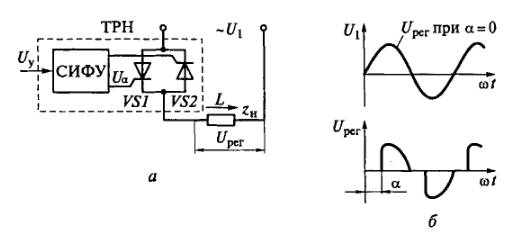
Рис. 3.17. Схема (а) и кривые напряжения (б) однофазного тиристорного регулятора напряжения
При активной нагрузке ТРН кривая тока / в нагрузке будет повторять кривую напряжения на ней, а при активно-индуктивном характере нагрузки будет от нее отличаться. Форма напряжения на нагрузке является несинусоидальной. Несинусоидальное напряжение можно представить как совокупность нескольких синусоидальных напряжений (гармоник). Частота изменения первой из них (основной гармоники) равна частоте питающего напряжения, а частоты других гармоник больше, чем первой. Обычно 1-я гармоника имеет наибольшую амплитуду и по ней ведутся все основные расчеты.
Закрытие тиристоров в непроводящий полупериод происходит за счет напряжения сети (так называемая естественная коммутация тиристоров), что позволяет использовать в схемах ТРН наиболее простые, надежные и дешевые однооперационные тиристоры.
На основе однофазной схемы (см. рис. 3.17, а) построены ТРН для регулирования напряжения на трехфазной нагрузке (рис. 3.18, а). Пример силовой части схемы для регулирования напряжения на статоре трехфазного асинхронного двигателя АД, состоящей из шести тиристоров VS1... VS6, приведена на рис. 3.18, б. За счет добавления в эту схему двух пар тиристоров создаются реверсивные схемы электропривода, а с помощью соответствующего управления ТРН могут обеспечивать и динамическое торможение двигателей.
В схемах ТРН вместо одной пары встречно-параллельно включенных тиристоров может применяться полупроводниковый прибор — симистор, обеспечивающий протекание тока в нагрузке в оба полупериода питающего напряжения и имеющий такой же принцип действия, что и тиристор. Его применение сокращает число электронных приборов вдвое и упрощает схему СИФУ, хотя он и менее надежен в работе.
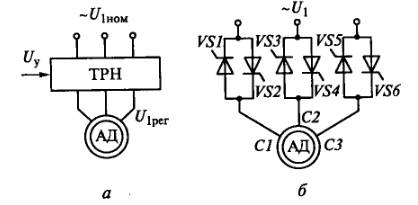
Рис. 3.18. Схемы включения тиристорного регулятора напряжения на трехфазной нагрузке:
а — общая; б — силовая части

Рис. 3.19. U-образные характеристики асинхронного двигателя
Тиристорные регуляторы напряжения находят широкое применение в электроприводах переменного тока, где за счет регулирования напряжения на статоре асинхронных двигателей обеспечиваются регулирование токов и моментов двигателей в переходных режимах, симметрирование токов в фазах, ряд защит двигателя и некоторые другие опции. Одна из них связана с повышением энергетических показателей работы асинхронных электроприводов при малых нагрузках. Тиристорные регуляторы напряжения, выполняющие эту функцию, получили название регуляторов экономичности, или экономайзеров.
Возможность энергосбережения этим способом иллюстрируют зависимости тока статора 1Х от прикладываемого к двигателю напряжения U1 (рис. 3.19) при разных моментах нагрузки Мс| < Мс2< Мс3< Мс4. Эти зависимости иногда называют U-образными характеристиками двигателя. Как видно из графиков, при каждой нагрузке двигателя имеется такое напряжение, при котором потребляемый ток минимален. Снижение тока происходит за счет уменьшения его реактивной составляющей. За счет этого обеспечиваются снижение потерь энергии в двигателе, повышение его КПД и коэффициента мощности cosφ.

Рис. 3.20. Зависимости тока статора, потерь мощности, КПД и коэффициента мощности от напряжения
На рис. 3.20 показаны построенные для двигателя 4А180М4 мощностью 30 кВт зависимости КПД п., cosφ, относительных тока статора I1* и потерь мощности в двигателе ΔР* от относительного напряжения U1* при моменте нагрузки Mс, равном 20% от номинального. Из кривых видно, что наилучших значений эти показатели достигают при напряжениях, равных 0,6…0,8 номинального значения.
Достижение экстремальных значений указанных переменных может быть обеспечено с помощью двух возможных схем включения асинхронного двигателя.
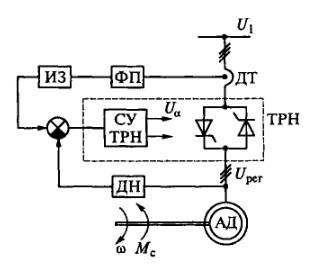
Рис. 3.21. Структурная схема электропривода с экстремальным регулятором
На рис. 3.21 приведена одна из них — схема с так называемым экстремальным регулятором*, позволяющая минимизировать потребляемый двигателем ток при различных нагрузках Mс. Схема содержит асинхронный двигатель АД, ТРН со схемой управления СУ, датчики тока ДТ и напряжения ДН, функциональный преобразователь ФП и инерционное звено ИЗ. За счет выбора характеристики ФП обеспечивается минимизация потребления тока при различных нагрузках двигателя, а инерционное звено ИЗ совместно с отрицательной обратной связью по напряжению устраняет возможные автоколебания в системе.
Показано**, что экстремальные значения переменных двигателя обеспечиваются при определенных (оптимальных) его скольжениях, которые должны поддерживаться постоянными при любых нагрузках. Эти скольжения sопт определяются по формулам:
• при минимизации тока статора —

• при минимизации потерь мощности —

• при минимизации активной потребляемой мощности —

• при максимализации коэффициента мощности —

где R1 R'2, Rμ — соответственно активные сопротивления статора, приведенное ротора и контура намагничивания; Хμ, Хк.з. — соответственно индуктивные сопротивления контура намагничивания и короткого замыкания.
Значение тока статора при оптимальном скольжении может быть вычислено по следующей формуле:

где Мс — момент нагрузки двигателя; ω0 — скорость холостого хода.
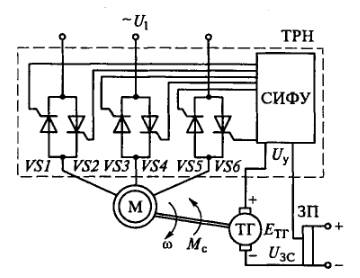
Рис. 3.22. Схема замкнутой системы ТРН — АД с обратной связью по скорости
Требуемый уровень оптимального скольжения может быть реализован в замкнутой по скорости системе ТРН—АД, схема которой приведена на рис. 3.22. На схеме обозначено: ТГ — тахогенератор, ЗП — потенциометр задания требуемой скорости (скольжения) двигателя. Схема обеспечивает поддержание скорости со и тем самым скольжения с определенной точностью при изменениях момента нагрузки Мс.
В качестве примера проведены расчеты по этим формулам применительно к двигателю 4A200L6Y3, имеющему следующие номинальные данные: Pном = 30 кВт; скольжение sном = 0,021; ток статоpa I1ном = 55,8 А; КПД ηном = 90,5 %; cosφном = 0,9. Результаты расчетов при моменте нагрузки 29 Н м, равном 10% номинального момента, приведены в табл. 3.2.
Таблица 3.2
Данные по оптимизации энергетических параметров
| Способ оптимизации | sопт | ΔР, кВт | I1, А | Р1, кВт | cosφ |
| Минимум потерь мощности ΔР | 0,012 | 0,219 | 13,1 | 3,22 | 0,835 |
| Минимум тока статора I1 | 0,006 | 0,271 | 11,8 | 3,29 | 0,678 |
| Минимум активной мощности Р1 | 0,014 | 0,223 | 13,9 | 3,21 | 0,858 |
| Максимум cosφ | 0,024 | 0,278 | 17,2 | 3,24 | 0,881 |
| Без оптимизации при U=Uном=const | 0,002 | 0,649 | 15,1 | 3,68 | 0,319 |
Результаты расчетов показывают, что за счет регулирования напряжения возможно примерно в 2,5 —3 раза уменьшить потери мощности и повысить cosφ.
До появления доступных преобразователей частоты в нашей стране предпринимались попытки использовать ТРН для регулирования скорости асинхронных двигателей насосов, работающих в продолжительном режиме.
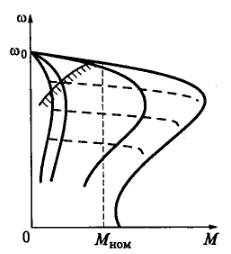
Рис. 3.23. Механические характеристики асинхронного двигателя при регулировании напряжения на статоре
Теоретически такое регулирование, называемое параметрическим, возможно, поскольку механические характеристики в разомкнутой системе имеют вид, показанный на рис. 3.23 сплошными линиями, а при использовании отрицательной обратной связи по скорости (см. рис. 3.22) — штриховыми. Однако такое решение связано с техническим ограничением, делающим его практически нецелесообразным.
Потери в роторной цепи в номинальном режиме, которые можно считать допустимыми, составляют

потери при регулировании скорости составляют

Приравняв  получим:
получим:

Из формулы (3.9) следует, что допустимая нагрузка резко падает с уменьшением скорости. При sном = 0,03 снижение скорости всего на 15% (sper ≈ 0,15) требует снижения момента в 5 раз (рис. 3.23, линия с засечками).
В связи с изложенным ограничением использование ТРИ в продолжительном режиме даже при благоприятной «вентиляторной» характеристике нагрузки (Mс ~ ω2) делает необходимым завышение мощности двигателя в 2,5 — 3 раза (увеличение Мном), использование ротора с повышенным сопротивлением (s'ном > sном), применение специальных средств (вентилятор— «наездник») для выдувания тепловых потерь из двигателя. Это делает внешне привлекательный способ регулирования скорости неконкурентоспособным.
Вместе с тем тиристорный регулятор напряжения, используемый по основному назначению — плавный пускатель, энергосберегающее устройство при малых нагрузках — очень полезное средство, широко используемое за рубежом, но мало применяемое в России.
Источник 3.6. Электропривод с тиристорным регулятором напряжения by powergroup.com.ua
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 1606; Нарушение авторских прав?; Мы поможем в написании вашей работы!