КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пример реализации частотно-управляемого ЭП с использованием ПЧ с АИН
|
|
|
|
Особенности применения в электроприводе статических ПЧ различных типов
Все рассмотренные типы статических ПЧ находят применение в современных системах управляемого ЭП переменного тока. В табл. П7.4 приведено примерное распределение применения статических ПЧ в зависимости от технологических требований к параметрам ЭП. Указанный в табл. П7.4 диапазон регулирования D подразумевает рабочий диапазон угловых скоростей, в котором обеспечивается выполнение технологических требований по жесткости механических характеристик, перегрузке и т.п.
Таблица П7.4
Условия применения статических ПЧ
| Параметры электропривода | НПЧ | ПЧ с АИН | ПЧ с АИТ |
| Мощность двигателя: – 100 кВт и менее – 0,1–1 МВт – 1,0 МВт и более | - + + | + + - | - + + |
| Частота на выходе ПЧ: – f2 < 50Гц – f2 = 50–100 Гц – f2 > 100 Гц | + - - | + + + | + + - |
Продолжение прил. 7
Окончание табл. П7.4
| Параметры электропривода | НПЧ | ПЧ с АИН | ПЧ с АИТ |
| Диапазон регулирования: – D < 10:1 – 0 = 10:1–100:1 – D > 100:1 | + + - | + + + | + - - |
| Режим генераторного торможения | + | - | + |
| Многодвигательный электропривод | - | + | - |
Электрическая функциональная схема ЭП с серийным ПЧ типа АРДН (автоматический регулятор для насосов) приведена на рис. П7.17.
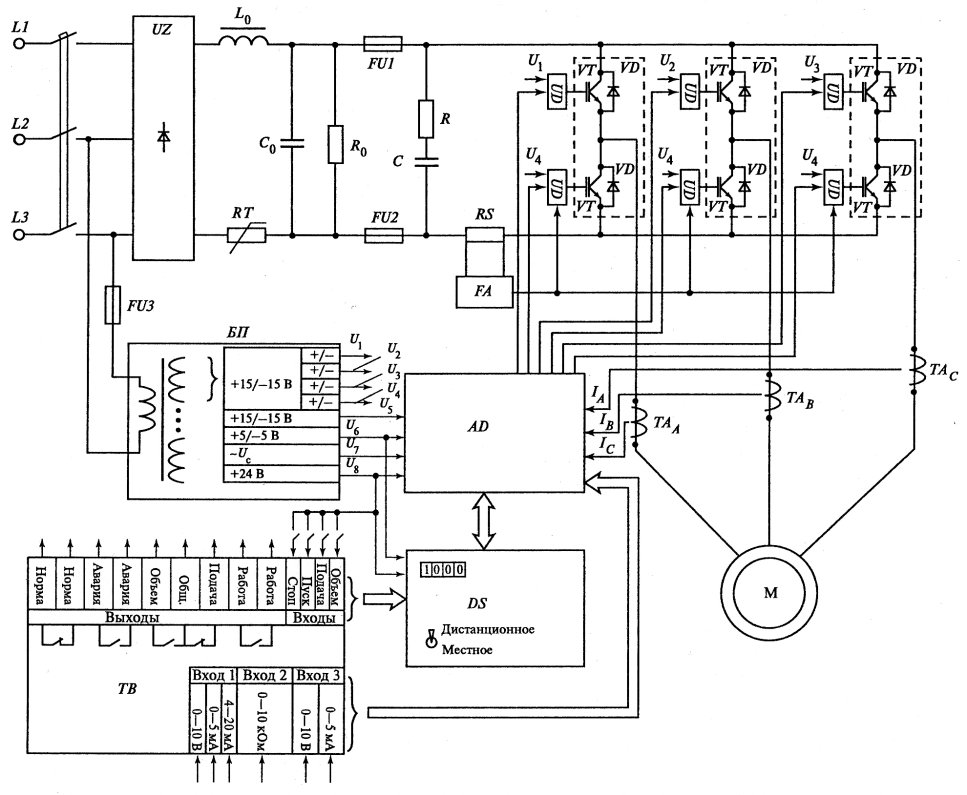
Рис. П7.17. Функциональная электрическая схема
асинхронного ЭП с ПЧ
Продолжение прил. 7
В ПЧ применена наиболее распространенная для управления короткозамкнутым АД схема ПЧ с АИН и ШИМ напряжения на выходе, неуправляемым выпрямителем на входе силовой части схемы и микропроцессорным управлением. При питании от сети 380 В наиболее рациональным является применение в инверторе полупроводниковых приборов нового поколения – биполярных транзисторов с изолированным затвором IGBT.
|
|
|
Основные элементы, входящие в эту схему (см. рис. П7.17):
UZ – неуправляемый выпрямитель; L0, C0 – фильтр; RT – термистор, ограничивающий ток заряда конденсатора С0; R0 – разрядное сопротивление для конденсатора С0; FU1, FU2, FU3 – предохранители; R, С – цепь защиты (снаббер) от перенапряжений на транзисторах IGBT; RS – датчик тока для организации защиты (FA) от сквозных и недопустимых токов перегрузки через IGBT; VT–VD – трехфазный инвертор на IGBT с обратным диодным мостом.
Основные блоки в системе управления:
– блок питания БП, состоящий из восьми гальванически развязанных источников постоянного напряжения;
– микроконтроллер AD на базе сигнального процессора 1899BE1;
– плата индикации DS с переключателем способа управления: местное или дистанционное;
– блок сопряжения ТВ для работы с внешними сигналами или командами;
– согласующие усилители UD – драйверы IGBT.
Электропривод работает следующим образом.
При подаче напряжения 380 В на силовой вход ПЧ в звене постоянного тока происходит процесс заряда конденсатора фильтра С0, который определяется значениями RT, L0, C0. Одновременно с этим в информационную часть схемы подается питание (напряжения U1 – U8). В процессе выдержки времени на установление напряжений стабилизированных источников питания U1 – U4 аппаратная защита FA блокирует открывание ключей инвертора и происходит запуск программы управления процессором по аппаратно формируемой команде «Рестарт».
Выполняется инициализация. Производится запись начальных условий в ячейки ОЗУ процессора и определяется способ управления – местное или дистанционное. Если с датчиков тока фаз двигателя ТАА, ТАВ, ТАС,аппаратной защиты FA,напряжения сети Uc, а также от всех каналов вторичного источника питания поступает информация о нормальных параметрах, то ЭП готов к работе и на цифровой индикатор выводятся нули, светится светоизлучающий диод «Подача». В противном случае загорается светоизлучающий диод «Авария» и на цифровом индикаторе появляется код срабатывания той или иной защиты.
|
|
|
Продолжение прил. 7
Для управления двигателем процессор формирует систему трехфазных синусоидальных напряжений, изменяемых по частоте и амплитуде, и передает их в модулятор, в котором синусоидальные сигналы управления фазами-«стойками» инвертора, состоящими из последовательно включенных ключей IGBT, преобразуются в дискретные команды включения и отключения транзисторов классическим методом центрированной синусоидальной ШИМ. Несущая частота ШИМ составляет от 5 до 15 кГц. Одновременное замыкание двух ключей в «стойке» инвертора блокируется, для учета реального времени запирания транзисторов в процесс переключения вводится «мертвое» время, составляющее единицы микросекунд, в течение которого оба ключа разомкнуты.
Микропроцессор 1899ВЕ1 позволяет реализовать только скалярное управление координатами двигателя. Структура системы автоматического управления технологическим объектом, в которую включен данный ПЧ, может быть самой разнообразной – от разомкнутой системы до замкнутой обратными связями по нескольким сигналам. Алгоритм управления также зависит от требований технологического объекта. Структура и алгоритм могут быть перепрограммированы.
Силовая часть ПЧ неизменна и пригодна для других способов управления координатами электродвигателя с применением более совершенных микропроцессорных средств.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 1208; Нарушение авторских прав?; Мы поможем в написании вашей работы!