КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные кинематические параметры агрегатов
|
|
|
|
Основные понятия и определения
Основные элементы кинематики агрегатов
Способы движения агрегатов
Большинство производственных операций в сельском хозяйстве выполняется мобильными агрегатами, т.е. работа МТА связана с его движением. Обычно МТА движется по полю и при этом выполняет технологический процесс (вспашку, культивацию, посев, уборку и т.д.).
При вспашке 100 га трактор типа МТЗ с трехкорпусным плугом проходит путь около 1050-1100 км. Из общего пути, проходимого агрегатом, в среднем 5-12 %, а на коротких участках и более, приходится на холостые ходы. Так как на холостое движение затрачивается время и топливо, то сокращение холостых ходов до минимума имеет важное значение для повышения производительности МТА и снижения затрат на обработку единицы площади.
Возможные виды холостого движения агрегата обычно подразделяют на две группы:
а) переезд МТА к месту работы или с участка на участок. Длина этих
холостых ходов зависит от организации работ, квалификации диспетчера;
б) холостые ходы, связанные с технологическим процессом (холостые
заезды, повороты в конце гона). Их длина зависит:
- oт выбора способа движения;
- длины гона;
- состава МТА;
- квалификации механизатора.
Главная задача при эксплуатации МТА ¾ сократить до минимума все виды холостых переездов.
Кинематика ¾ это раздел науки, в котором изучается движение агрегата с точки зрения его геометрических форм. Под кинематикой агрегата понимают его движение при выполнении сельскохозяйственных работ. Основные элементы этого движения обуславливаются рабочими ходами, преимущественно близкими к прямолинейным, и холостыми ходами, связанными с поворотами, заездами и переездами.
При повороте агрегата различные его точки проходят неодинаковый путь. Обычно о траектории и скорости движения МТА судят по движению его кинематического центра.
В качестве кинематического центра агрегата (ц.а) условно принимают:
1) для агрегатов с колесными тракторами и самоходных машин с передними управляемыми колесами центр агрегата ¾ точку пересечения продольной оси машины с осью ведущих колес (рис. 2.20, а);
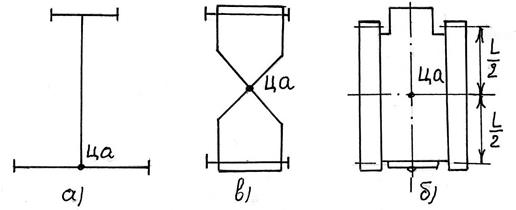
Рис. 2.20 Расположение кинематического центра агрегата:
а ¾ колесные трактора с передними управляемыми колесами; б ¾ гусеничный трактор;
в ¾ колесный трактор с шарнирным остовом
2) для гусеничных тракторов ¾ точку пересечения продольной оси с линией, проходящей через середину опорных поверхностей гусеницы (рис. 2.20, б);
3) для агрегатов с колесными тракторами, имеющих шарнирный остов,
центр агрегата совпадает с центром шарнира (рис. 2.20, в).
Схематично рассмотрим движение агрегата по прямой и при повороте. Движение по прямой является главным элементом в кинематике каждого агрегата, так как преимущественно по этому пути осуществляется рабочий ход.
Наиболее существенными характеристиками агрегата, определяющими его кинематику, являются:
1) кинематическая длина агрегата  ¾ проекция расстояния от центра агрегата (ц.а) до линии расположения наиболее удаленного рабочего органа при прямолинейном движении (рис. 2.21).
¾ проекция расстояния от центра агрегата (ц.а) до линии расположения наиболее удаленного рабочего органа при прямолинейном движении (рис. 2.21).
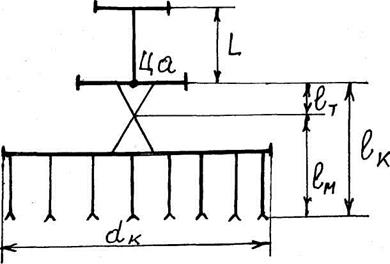
Рис. 2.21 Схемак определению кинематической характеристики симметричного агрегата при прямолинейном движении
Кинематическая длина агрегата при наличии сцепки определяется по выражению:
 ,
,
где  ¾ кинематическая длина трактора;
¾ кинематическая длина трактора;
 ¾ кинематическая длина сцепки;
¾ кинематическая длина сцепки;
 ¾ кинематическая длина машины;
¾ кинематическая длина машины;
2) кинематическая ширина агрегата  ¾ расстояние между крайними точками по ширине машины для симметричных агрегатов. Для несимметричных агрегатов различают кинематическую ширину вправо и влево. В этом случае кинематическая ширина является суммой проекций расстояний между продольной осью агрегата, проходящей через его центр, и наиболее удаленными от этой оси точками агрегата вправо и влево;
¾ расстояние между крайними точками по ширине машины для симметричных агрегатов. Для несимметричных агрегатов различают кинематическую ширину вправо и влево. В этом случае кинематическая ширина является суммой проекций расстояний между продольной осью агрегата, проходящей через его центр, и наиболее удаленными от этой оси точками агрегата вправо и влево;
3) продольная база трактора  ¾ расстояние между осями ведомых и ведущих колес или крайними осями опорных катков гусеничного трактора;
¾ расстояние между осями ведомых и ведущих колес или крайними осями опорных катков гусеничного трактора;
4) центр поворота агрегата (ц.п) ¾ это точка, относительно которой осуществляется поворот (рис. 2.22);
5) радиус поворота  ¾расстояние между центрами поворота и агрегата. Он является одной из важнейших кинематических характеристик, определяющих длину поворота и ширину поворотной полосы. Для уменьшения затрат времени на холостые ходы и сокращения холостого пути необходимо стремиться осуществлять поворот с наименьшим радиусом.
¾расстояние между центрами поворота и агрегата. Он является одной из важнейших кинематических характеристик, определяющих длину поворота и ширину поворотной полосы. Для уменьшения затрат времени на холостые ходы и сокращения холостого пути необходимо стремиться осуществлять поворот с наименьшим радиусом.

Рис. 2.22 Схема к определению кинематических характеристик агрегата на повороте
Наименьшим допустимым радиусом поворота называется радиус такой окружности, движение по которой возможно в соответствующих условиях без поломок агрегата.
 .
.
Радиус поворота агрегата зависит:
а) от радиуса поворота трактора;
б) конструкции с.-х.машины и сцепки;
в) габаритов агрегата по длине и ширине;
г) скорости движения на повороте;
д) квалификации механизатора.
Для практических расчетов значения радиуса поворота агрегата можно принять:
- навесные агрегаты:
 , но не < 5-6 м;
, но не < 5-6 м;
- широкозахватные агрегаты ( > 6 м)
> 6 м)
 ;
;
- для агрегатов с большой кинематической длиной
 .
.
Перед началом работы необходимо подготовить поле к работе. Для выполнения технологической операции в соответствии с принятым способом движения поле разбивают на рабочие участки, загоны и, при необходимости, делянки. На концах рабочих участков для поворотов агрегатов временно выделяется поворотная полоса. Она отделяется от основного участка контрольной линией (рис. 2.23) и служит ориентиром для включения и выключения рабочих органов. Поворотные полосы выделяются тогда, когда нет возможности осуществлять поворот за пределами обрабатываемого участка.
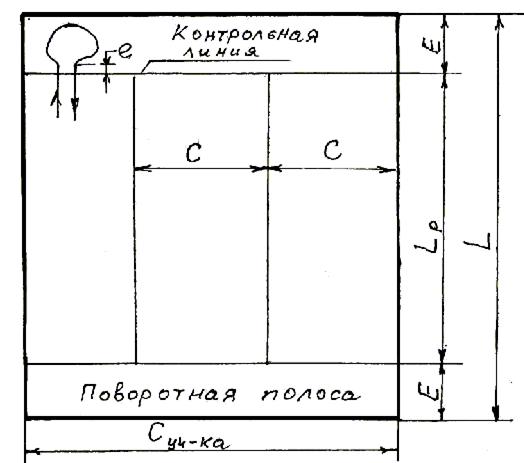
Рис. 2.23 Схема рабочего участка:
 ¾ ширина рабочего участка (поля); L ¾ длина; С ¾ ширина загона;
¾ ширина рабочего участка (поля); L ¾ длина; С ¾ ширина загона;
 ¾ рабочая длина загона; Е ¾ ширина поворотной полосы; е ¾ длина выезда
¾ рабочая длина загона; Е ¾ ширина поворотной полосы; е ¾ длина выезда
агрегата
Контрольная линия ¾ это граница между поворотной полосой и рабочей частью загона.
Поворотная полоса ¾ часть загона, временно вьделяемая для поворотов.
 ¾ ширина поворотной полосы. Ширина поворотной полосы должна быть кратной ширине захвата агрегата.
¾ ширина поворотной полосы. Ширина поворотной полосы должна быть кратной ширине захвата агрегата.
Длина выезда агрегата (t) ¾ это расстояние, на которое нужно продвинуть центр агрегата от контрольной линии на поворотной полосе до начала поворота (т.е. задние рабочие органы должны достигнуть контрольной линии).
Для прицепных агрегатов длину выезда принимают

Для навесных агрегатов с задней навеской

Для агрегатов с передней фронтальной навеской

Основной характеристикой кинематики агрегата является коэффициент рабочих ходов. Он определяется по выражению:
j  ,
,
где  ¾ соответственно путь, пройденный агрегатом на рабочем и хо-
¾ соответственно путь, пройденный агрегатом на рабочем и хо-
лостом ходу, м.
Величина коэффициента рабочих ходов j зависит от длины участка, вида поворота, способа движения.
|
|
|
|
|
Дата добавления: 2015-07-02; Просмотров: 6965; Нарушение авторских прав?; Мы поможем в написании вашей работы!