КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Рекомендации по выбору электродвигателя
ВЫБОР ДВИГАТЕЛЯ И КИНЕМАТИЧЕСКИЙ РАСЧЕТ
Назначение и содержание расчетов
В ходе курсового проектирования выполняют расчеты двух видов:
· проектировочные расчеты;
· проверочные расчеты.
Геометрический, кинематический и силовой расчеты на стадии технического предложения рассматриваются как проектировочные расчеты и проводятся по данным, определенным заданием на курсовой проект. Эти расчеты, как правило, носят ориентировочный характер, и их включают в пояснительную записку курсового проекта в виде приложений.
По результатам проектирования выполняют проверочные расчеты, необходимые для подтверждения работоспособности конструкции. Эти расчеты являются необходимым элементом проектирования.
Расчеты в общем случае должны содержать:
· схему рассчитываемого изделия;
· задачу расчета (с указанием, что требуется определить);
· исходные данные для расчета;
· условия, положенные в основу расчета;
· расчет (расчетные зависимости с необходимыми данными и результаты расчета);
· заключение по результатам расчета.
В проектируемом изделии может требоваться постоянное или переменное значение частоты вращения вала двигателя. В первом случае применяют синхронные и асинхронные двигатели переменного тока или двигатели постоянного тока с регуляторами скорости. Для регулируемых приводов обычно выбирают двигатели постоянного тока, шаговые двигатели, двигатели переменного тока с частотным управлением.
Для проектируемых в рамках данного курсового проекта приводов общего назначения рекомендуются асинхронные короткозамкнутые двигатели серии 4А. Эти двигатели наиболее универсальны, причем при необходимости могут обеспечивать реверсивность.
Асинхронные двигатели переменного тока имеют угловую скорость установившегося движения, отличающуюся от номинальной на 5…20 %.
Изображение и размеры асинхронных двигателей даны на рис. 2.1 и в табл. 2.1
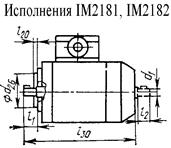

Рис. 2.1. Конструкции двигателей
Таблица 2.1
Размеры двигателей асинхронных серий 4А, мм
| Габариты | l 1 | l 10 | l 20 | l 30 | d 30 | h 10 | b 10 | b 31 | h 37 | d 1 | d 10 | d 20 | d 22 | d 26 |
| 9 h 6 | 5,8 | М5 | 40 h 6 | |||||||||||
| 11 h 6 | 5,8 | М5 | 50 h 6 | |||||||||||
| 3,5 | 14 h 6 | 7,8 | М5 | 60 h 6 |
Для определения требуемой мощности электродвигателя (табл. 2.2, 2.3) следует использовать значения приведенных моментов сил сопротивления на выходном валу редуктора T c и номинальной угловой скорости этого вала ωс или же тяговой силы стола F и скорости перемещения стола прибора V.
Таблица 2.2
Технические характеристики двигателей
асинхронных трехфазных серии 4ААМ
| Обозначение | Р, Вт | n, об/мин | I, А | cosφ | η, % | 
| 
| 
| I 0·10–4, кг·м2 | Fr, Н | Fa, H |
| Двухполюсные, синхронная частота вращения 3000 об/мин | |||||||||||
| 50А2 | 0,32 | 0,70 | 2,0 | 1,8 | 2,2 | ||||||
| 50В2 | 0,32 | 0,70 | 2,0 | 1,8 | 2,2 | ||||||
| 56А2 | 0,54 | 0,76 | 2,0 | 1,5 | 2,2 | ||||||
| 56В2 | 0,74 | 0,77 | 2,0 | 1,5 | 2,2 | ||||||
| 63А2 | 0,93 | 0,86 | 2,0 | 1,2 | 2,2 | ||||||
| 63В2 | 1,33 | 0,86 | 2,0 | 1,2 | 2,2 | ||||||
| Четырехполюсные, синхронная частота вращения 1500 об/мин | |||||||||||
| 50А4 | 0,31 | 0,60 | 2,0 | 1,7 | 2,2 | ||||||
| 50В4 | 0,42 | 0,60 | 2,0 | 1,7 | 2,2 | ||||||
| 56А4 | 0,44 | 0,66 | 2,1 | 1,5 | 2,2 | ||||||
| 56В4 | 0,64 | 0,64 | 2,1 | 1,5 | 2,2 | ||||||
| 63А4 | 0,65 | 0,65 | 2,0 | 1,2 | 2,2 | ||||||
| 63В4 | 0,69 | 0,69 | 2,0 | 1,2 | 2,2 | ||||||
| Примечание. Fr, Fa – предельные радиальная и осевая (при предельной радиальной) нагрузки на конец вала, I 0 – момент инерции ротора |
Таблица 2.3
Технические характеристики двигателей
асинхронных трехфазных серии 4ААМ
| Обозначение | Р, Вт | n, об/мин | 
| cosφ | η, % |
|
|
|
| Двухполюсные, синхронная частота вращения 3000 об/мин | ||||||||
| Е50А2, У50А2 | 6,5 (3,0) | 0,60 | 1,0 (0,9) | 1,9 | 0,8 (1,7) | |||
| Т50В2, УТ50А2 | 3,5 (4,0) | 0,80 | 0,4 (2,0) | 2,0 | 0,4 (2,0) | |||
| Е50В2, У50В2 | 6,5 (3,0) | 0,59 | 1,0 (1,9) | 1,9 | 0,9 (1,7) | |||
| Т50В2, УТ50В2 | 3,5 (4,0) | 0,93 | 0,5 (2,0) | 2,0 | 0,5 (2,0) | |||
| Е56А2, У56А2 | 8,5 (4,5) | 0,82 | 0,8 (1,7) | 1,6 | 0,8 (1,0) | |||
| Т56А2, УТ556А2 | 4,0 (5,0) | 0,96 | 0,4 (1,5) | 1,8 | 0,4 (1,0) | |||
| Е56В2, У56В2 | 8,5 (5,5) | 0,76 | 0,8 (1,6) | 1,6 | 0,8 (1,0) | |||
| Т56В2, УТ56В2 | 4,0 (5,0) | 0,96 | 0,4 (1,5) | 1,8 | 0,4 (1,0) | |||
| Е63А2, У53А2 | 8,5 (5,5) | 0,76 | 0,8 (1,6) | 1,7 | 0,8 (1,0) | |||
| Т63А2, УТ63А2 | 4,0 (5,0) | 0,96 | 0,4 (1,6) | 1,7 | 0,4 (1,0) | |||
| Е63В2, У63В2 | 8,5 (5,5) | 0,75 | 0,8 (1,9) | 1,7 | 0,8 (1,0) | |||
| Т63В2, УТ63А2 | 4,0 (5,0) | 0,95 | 0,4 (1,5) | 1,7 | 0,4 (1,0) | |||
| Четырехполюсные, синхронная частота вращения 1500 об/мин | ||||||||
| Е50А4, У50А4 | 4,5 (2,5) | 0,51 | 1,0 (2,2) | 1,9 | 0,8 (2,0) | |||
| Т50В4, УТ50А4 | 2,5 (3,0) | 0,67 | 0,4 (1,9) | 2,0 | 0,4 (1,7) | |||
| Е50В4, У50В4 | 4,5 (2,5) | 0,54 | 1,0 (1,9) | 1,9 | 0,8 (1,7) | |||
| Т50В4, УТ50В4 | 2,0 (4,0) | 0,85 | 0,6 (1,9) | 2,0 | 0,6 (1,7) | |||
| Е56А4, У56А4 | 2,5 (4,5) | 0,65 | 1,0 (1,6) | 1,5 | 0,8 (1,0) | |||
| Т56А4, УТ556А4 | 4,0 (5,0) | 0,88 | 0,4 (1,6) | 1,6 | 0,4 (1,0) | |||
| Е56В4, У56В4 | 7,5 (4,0) | 0,65 | 1,0 (1,7) | 1,5 | 0,8 (1,0) | |||
| Т56В4, УТ56В4 | 4,0 (4,5) | 0,88 | 0,4 (1,8) | 1,6 | 0,4 (1,0) | |||
| Е63А4, У53А4 | 7,5 (4,0) | 0,65 | 1,0 (2,0) | 1,5 | 0,8 (1,0) | |||
| Т63А4, УТ63А4 | 4,0 (4,5) | 0,90 | 0,4 (1,8) | 1,6 | 0,4 (1,0) | |||
| Е63В4, У63В4 | 6,5 (4,0) | 0,65 | 1,0 (2,0) | 1,5 | 0,8 (1,0) | |||
| Т63В4, УТ63А4 | 4,0 (4,5) | 0,91 | 0,4 (1,8) | 1,6 | 0,4 (1,0) | |||
| Примечания: 1. В скобках даны значения кратности моментов и токов для двигателей с пусковым конденсатором (исполнения У и УТ). 2. Моменты инерции ротора и предельные нагрузки на конец вала смотрите для соответствующего габарита по табл. 2.2 |
Следует иметь в виду, что на потребляемую мощность влияют не только полезная нагрузка, но и потери в механизме, его динамические характеристики, точные значения которых можно определить только в процессе конструирования.
Требуемую мощность P электродвигателя при вращательном движении рабочего элемента определяют из зависимости
 , (2.1)
, (2.1)
где P – мощность электродвигателя, Вт;
T c – момент сил сопротивления на выходном валу редуктора, Н∙м;
ωс – номинальная угловая скорость выходного вала, с–1;
K дин – коэффициент запаса, учитывающий необходимость преодоления динамических нагрузок в момент разгона. Если в задании не оговорено время переходного процесса, обычно принимают K дин = 1,05…1,10;
η – коэффициент полезного действия привода, равный произведению частных КПД передач, входящих в кинематическую схему.
Требуемую мощность P электродвигателя при поступательном движении рабочего элемента определяют из зависимости
 , (2.2)
, (2.2)
где F – тяговая сила стола, Н;
V – скорость перемещения стола прибора, м/с.
Значения КПД на этой стадии проектирования задают исходя из предполагаемого вида передач от двигателя к рабочему звену. Мощность электродвигателя для проектируемого привода должна быть не ниже той, которая определена по формулам (2.1), (2.2). Каждому значению номинальной мощности P ном обычно соответствует не один, а несколько типов асинхронных двигателей с различными частотами вращения, близкими к номинальным значениям 3000, 1500, 1000, 750 об/мин.
При выборе двигателя надо учитывать, что тихоходные электродвигатели с синхронной частотой вращения 750 об/мин и менее применяют в технически обоснованных случаях, т.к. они дороже быстроходных и имеют большие габариты.
После проектирования редуктора необходимо определить действительные значения КПД и произвести проверочный расчет двигателя. Момент на валу выбранного двигателя должен быть не менее приведенного расчетного момента.
|
|
Дата добавления: 2015-06-27; Просмотров: 528; Нарушение авторских прав?; Мы поможем в написании вашей работы!