КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Машинный интеллект и робототехника
|
|
|
|
Основу всякого робота составляет его «тело» (рис. 2, блок 7), т.е. совокупность механических, электромеханических, пневматических и т.п. устройств, обеспечивающих его прочностные и несущие свойства (шасси, кожухи), способность перемещаться в пространстве (колеса, гусеницы, «ноги» и их приводы) и воздействовать на объекты внешнего мира (эффекторы — манипуляторы, толкатели, захваты). На шасси располагают устройства восприятия информации из среды (сенсоры), устройства управления и различные вспомогательные устройства, рассматриваемые как физические объекты. В зависимости от назначения робота состав его «тела» может изменяться.
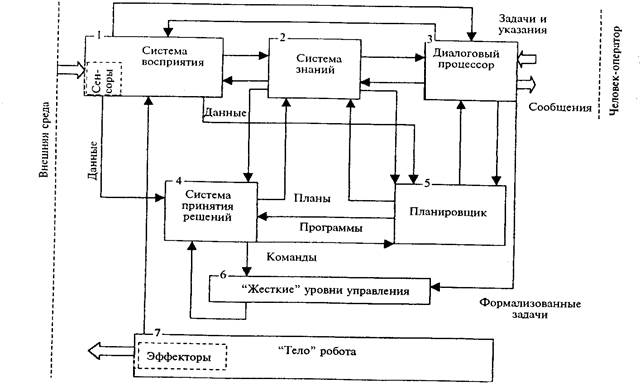
Рис. 2. Структурная схема робота с элементами искусственного интеллекта
Непременным компонентом робота является система управления, которую называют «жесткой» (блок 6). Она содержит неизменяемую программу или логические устройства, которые управляют работой приводов движителей и эффекторов, и может быть также представлена совокупностью выключателей, упоров и т.п. В тех случаях, когда робот снабжен более развитой системой управления, «жесткая» система составляет ее нижний уровень.
Система восприятия (блок 7) включает датчики, контролирующие состояние «тела» робота, и параметры внешней ситуации, в которой он находится. Сюда могут входить также развитые системы технического зрения, содержащие оптические, ультразвуковые, телевизионные и т.п. устройства. Все они составляют набор сенсоров робота. Система восприятия включает также средства предварительной обработки информации, поступающей от сенсоров, и средства интерпретации этой информации. Под интерпретацией понимают «перевод» языка выходных сигналов сенсоров на язык описания объектов и состояний внешней среды. Интерпретация осуществляется с помощью знаний о внешнем мире и «теле» робота, хранящихся в блоке 2. Интерпретированные сообщения предъявляются человеку-оператору, принимающему участие в управлении роботом (связь с блоком 3), или могут использоваться собственной системой управления (связи с блоками 4 и 5).
Устройство связи робота с человеком-оператором — диалоговый процессор — предназначен для выполнения ряда функций. Одна из них состоит в восприятии и предварительной обработке входных высказываний, поступающих от оператора. С помощью высказываний оператор может ставить перед роботом задачи, управлять процессом их решения, корректировать действия робота и т.п. Специальные высказывания могут быть адресованы системе восприятия и управлять режимом ее работы (включение/выключение отдельных сенсоров, задачи на поиск нужных признаков, объектов). Высказывания могут быть речевыми или иметь текстовую форму. В последнем случае они представляются, например, в виде последовательности рукописных символов, пробивок на перфоленте или воздействий на специальную клавиатуру. Речевые высказывания могут производиться на некотором более или менее ограниченном подмножестве естественного языка.
Функция предварительной обработки состоит в осуществлении морфологического и синтаксического анализа входных высказываний, выполняемого на основе знаний об используемом языке (блок 2).
Следующая функция диалогового процессора связана с семантическим анализом высказываний. В ходе этого анализа высказывание интерпретируется в некий внутренний язык робота, понятный его системам управления, и на этом языке формулируется задача или сообщение, смысл которых должен полностью совпадать со смыслом воспринятого высказывания. Так осуществляется «понимание» роботом человека. Полнота этого понимания может быть проконтролирована лишь по конечным результатам действий робота.
Семантический анализ проводится на основе знаний, представленных в блоке 2. При этом должны быть использованы знания не только о внешнем (физическом) мире и о самом роботе, но и знания о мире задач человека, его целях, способах их выражения, характерных умолчаниях и т.п. Так, приказание «принеси круглый предмет» не должно приводить к попыткам робота рассмотреть в качестве круглого предмета голову оператора.
Полнота реализации описанных функций зависит от назначения робота и уровня используемого языка управления. Если, например, указания формируются в терминах команд для блока б, диалоговый процессор может быть редуцирован до клавиатуры управления.
Еще одна функция диалогового процессора состоит в интерпретации и выдаче сообщений и запросов, формируемых системами восприятия, знаний и управления. Интерпретация заключается в переводе сообщений с внутреннего языка робота на язык систем вывода. В качестве последних могут использоваться синтезаторы речи, видеотерминалы, графопостроители и другие устройства.
Собственно система управления робота, точнее ее высшие уровни, представлены планировщиком (блок 5) и системой принятия решений, или решателем (блок 4). Задача планировщика заключается в том, чтобы на основе соответствующих данных осуществить автоматическое решение задачи, формальное описание которой поступает из диалогового процессора. В простых случаях планировщик выступает в роли трассировщика, определяющего оптимальную или близкую к ней траекторию (программу) перемещения в пространстве рабочих органов робота или самого робота. В более сложных случаях планировщик выполняет сложную обработку информации, представленной не только в цифровой, но и в символьной форме, и вырабатывает обобщенные планы достижения поставленной цели.
Решатель обычно выполняет те же функции, что и планировщик. Различие заключается в работе на разных уровнях детализации задач. Уровень планировщика можно назвать стратегическим, а уровень решателя — тактическим. При решении своих задач планировщик использует информацию об общем характере среды, примерном расположении препятствий и т.п. Такая информация хранится преимущественно в блоке 2 и играет роль карты рабочего пространства. Решатель же использует в основном данные о текущей ситуации, поступающие от системы восприятия, и формирует конкретные команды управления, последовательность которых должна обеспечить выполнение текущих этапов плана, синтезированного планировщиком.
Если выполнение плана приводит к неудаче, например, робот наталкивается на непреодолимое препятствие и очередная команда не может быть выполнена, решатель распознает это либо по данным системы восприятия, либо по сигналам с «жесткого» уровня управления и формирует соответствующее сообщение для планировщика. Последний либо решает задачу заново, синтезируя новый план, либо
через диалоговый процессор передает сообщение оператору и ожидает дальнейших указаний.
Каждый из рассмотренных блоков реализует довольно сложный комплекс функций, решая при этом свою задачу. Проблемы, связанные с разработкой теоретических принципов и технических средств построения каждого из блоков, и являются основными проблемами робототехники. Все они тесно связаны с идеями и методами искусственного интеллекта.
Типология роботов. Многие из уже существующих и разрабатывающихся в настоящее время роботов существенно различаются как по структуре, так и по функциональным возможностям. Различают три поколения роботов. Эта классификация основана на их структурных различиях и в то же время отражает хронологию развития робототехники.
Первыми были созданы роботы, включающие только блоки 6 и 7 (см. рис. 2) Они названы роботами первого поколения. К ним относятся практически все известные в настоящее время промышленные роботы. Роботы второго поколения, или очувствленные роботы, включают блоки 7, 4, 6 и 7. Например, система «глаз—рука». Отметим, что ранние представители этого поколения обладали довольно примитивными сенсорами, а их системы принятия решений реализовывали простые переключения «жестких» программ. В дальнейшем они значительно усложнились, однако наиболее совершенные роботы этого класса существуют пока лишь в лабораториях.
Роботы третьего поколения, или роботы с искусственным интеллектом (блоки 1—7), находятся в настоящее время в стадии разработки. Одной из основных проблем их создания является проблема знаний.
В ряде случаев оказывается удобным пользование не структурной, а функциональной классификацией, поскольку она указывает, что робот может делать и для чего применяться. Рассмотрим такую классификацию, используя понятие степени интеграции функций робота.
Развитые, функционально завершенные системы, являющиеся компонентами роботов разного типа, могут быть разделены на пять основных групп:
группа В — системы восприятия зрительной, слуховой, тактильной и других типов информации о внешнем мире;
группа М — системы воздействия на объекты внешнего мира — различные манипуляторы, толкатели и т. п.;
группа Т — системы, обеспечивающие перемещение робота (колесные, гусеничные, шагающие, плавающие, летающие платформы и аппараты);
группа П — системы целеполагания и планирования действий робота, системы решения задач;
группа Р — системы, обеспечивающие коммуникацию робота с человеком-оператором и другими роботами на языках общения различных уровней, вплоть до естественного.
|
|
|
|
|
Дата добавления: 2015-06-27; Просмотров: 1633; Нарушение авторских прав?; Мы поможем в написании вашей работы!