КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
ВВЕДЕНИЕ 1 страница. Нет ничего, на что бы ни дерзнуло воображение человека
|
|
|
|
ЦИФРОВАЯ ОБРАБОТКА СИГНАЛОВ
Тема 17. ОБРАБОТКА ИЗОБРАЖЕНИЙ
Нет ничего, на что бы ни дерзнуло воображение человека.
Тит Лукреций. Римский философ и поэт. I в. до н.э.
Воображение вещь хорошая. Но вытащить бомжа из подвала, отмыть, превратить в Аполлона, упаковать в спичечную коробку и отправить подруге по электронной почте хорошая графическая программа сделает лучше.
Анатолий Пышминцев, Новосибирский геофизик Уральской школы. ХХ в.
Содержание
Введение.
1. Основные понятия. Графическое представление изображений. Представление цвета в машинной графике. Цветовая модель RGB. Цветовая система CIE XYZ.
2. Геометрические преобразования растровых изображений. Области и этапы преобразований. Дискретизация. Интерполяционный ряд восстановления двумерного сигнала. Частотные искажения изображений и их устранение. Передискретизация изображений.
3. Фильтрация изображений. Линейные фильтры. Сглаживающие фильтры. Контрастоповышающие фильтры. Разностные фильтры. Двумерная циклическая свертка. Нелинейные фильтры. Пороговая фильтрация. Медианная фильтрация. Фильтры экстремумов.
4. Сжатие изображений. Алгоритмы кодирования длины повторения (RLE). Словарные алгоритмы. Алгоритмы статистического кодирования. Сжатие изображений с потерями. Оценка потерь в изображениях. Преобразование Фурье. Вейвлет-преобразование.
Размах исследований в области цифровой обработки изображений стремительно нарастает. Это определяется тем, что обработка изображений — это обработка многомерных сигналов, а большинство сигналов в реальном мире является многомерными.
Изображение в математическом представлении - двумерный сигнал, несущий огромное количество информации. Цветное изображение размером 500 × 500 элементов - это массив в несколько сотен тысяч байтов. Обрабатывать такую информацию можно лишь рациональной организацией вычислений. Для конкретных задач обработки изображений можно применять эффективные способы обработки с учетом особенностей и ограничений этой конкретной задачи. Но если говорить об обработке изображений для решения широкого класса задач, то необходимо выделить набор стандартных операций, из которых можно строить алгоритмы для решения произвольных задач. К их числу относятся линейные преобразования, двумерная свертка и двумерное дискретное преобразование Фурье.
Но при обработке изображений широкое использование находят и нелинейные преобразования. Особенность изображений состоит в том, что отдельные элементы изображения находятся в определенной связи с соседними элементами. Поэтому большинство алгоритмов преобразования изображений носит локальный характер, т. е. обрабатывают изображения по группам элементов, располагающихся в окрестности вокруг данного. Линейные преобразования удовлетворяют свойству локальности и допускают построение алгоритмов, вычислительная сложность которых мало зависит от размеров охватываемой окрестности. Такие же свойства требуются и от нелинейных преобразований изображений. К классу таких преобразований относятся алгоритмы, которые называют алгоритмами ранговой фильтрации, основанными на вычислении локальных ранговых статистик изображений. При вычислении ранговых статистик и производных от них возможны упрощения, связанные с информационной избыточностью изображений. Наиболее известный алгоритм этого класса — алгоритм медианной фильтрации. Другими примерами ранговых алгоритмов могут служить алгоритмы экстремальной фильтрации, которые заменяют анализируемый элемент изображения максимумом или минимумом по окрестности. Еще одно свойство ранговых алгоритмов - локальная адаптация к характеристикам обрабатываемого изображения и потенциальные возможности их использования не только для сглаживания и очистки от шумов, но и для выделения признаков при автоматическом распознавании изображений.
При обработке изображений широко используются методы обработки одномерных сигналов, если возможно их обобщение на многомерные сигналы. При этом, приходится учитывать, что математические методы описания многомерных систем не отличаются завершённостью. Многомерные системы обладают большим числом степеней свободы, и их проектирование приобретает гибкость, не свойственную одномерным системам. В то же время, многомерные полиномы не разлагаются на простые множители, что усложняет анализ и синтез многомерных систем.
17.1. Основные понятия [1i]
Графическое представление изображений. Для представления графической информации на двумерной плоскости (экране монитора) применяются два подхода: растровый и векторный.
При векторном подходе графическая информация описывается как совокупность абстрактных геометрических объектов - прямые, отрезки, кривые, прямоугольники и т.п. Векторное описание предполагает априорные знания о структуре изображения.
Растровая графика оперирует с произвольными изображениями в виде растров. Растр (raster) - это описание изображения на плоскости путем разбиения (дискретизации) его на одинаковые элементы по регулярной сетке и присвоение каждому элементу своего цветового и любых других атрибутов. Самый простой растр – прямоугольный, самый экономичный по количеству отсчетов для передачи изображений - гексагональный. С математических позиций растр – это кусочно-постоянная аппроксимация на плоскости непрерывной функции изображения.
Элемент растра называют пикселем (pixel). Стандартная идентификация пикселей:
f(i, j) = (A(i, j),C(i, j)), (17.1.1)
где A(i, j) Ì R2 - область пикселя, C(i, j) Î C - атрибут пикселя (как правило, цвет). Чаще всего используются два вида атрибутов:
C(i, j) = I(i, j) - интенсивность (яркость) пикселя;
C(i, j) = {R(i, j), G(i, j), B(i, j)} - цветовые атрибуты в цветовой модели RGB.
В матричной форме:
Mij = (Aij, Cij).
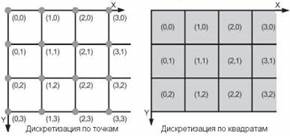 Рис. 17.1.1.
Рис. 17.1.1.
|
При дискретизации непрерывных изображений значения Aij могут определяться двояко, либо как значения точек Aij = (i, j), для которых определены атрибуты Cij, либо как значения квадратов Aij = (i, i+1) × (j, j+1) или любой другой формы, с определением Cij по средним значениям в пределах этой формы (рис. 17.1.1).
На практике, как правило, X и Y - ограниченные наборы неотрицательных целых чисел квадратного или прямоугольного растра с аспектовым отношением (aspect ratio) ширины к высоте растра, которое записывается в виде, например "4:3".
Представление цвета в машинной графике. Понятие цвета базируется на восприятии глазами человека электромагнитных волн в определенном диапазоне частот. Воспринимаемый нами дневной свет имеет длины волн λ от 400 нм (фиолетовый) до 700 нм (красный). Описанием светового потока может служить его спектральная функция I(λ). Свет называется монохроматическим, если его спектр имеет только одну определенную длину волны.
 Рис. 17.1.2.
Рис. 17.1.2.
|
На сетчатке глаза находятся два типа рецепторов: палочки и колбочки. Спектральная чувствительность палочек (рис. 17.1.2) прямо пропорциональна яркости падающего света. Колбочки разделяются на три вида, каждый из которых имеет определенную чувствительность в ограниченных диапазонах с максимумами к красному, зеленому и синему цветам, и резко теряют свою чувствительность в темноте. Восприимчивость глаза к синему цвету значительно ниже, чем к двум другим. Важным свойством восприятия света человеком является линейность при сложении цветов с разными длинами волн.
Цветовая модель RGB (Red, Green, Blue - красный, зеленый, голубой) в машинной графике в настоящее время является самой распространенной. В этой модели спектральная функция представляется как сумма кривых чувствительности для каждого типа колбочек с неотрицательными весовыми коэффициентами (с нормировкой от 0 до 1), которые так и обозначаются - R, G и B. Модель характеризуется свойством аддитивности для получения новых цветов. К примеру, кодировка спектральных функций:
- черного цвета: fblack = 0, (R,G,B) = (0,0,0);
- фиолетового цвета fviolet = fred + fblue, (R,G,B) = (1,0,1);
- белого цвета fwhite = fred + fgreen + fblue, (R,G,B) = (1,1,1).
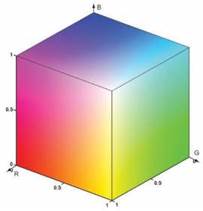 Рис. 17.1.3.
Рис. 17.1.3.
|
Трехмерное пространство цветов модели RGB приведено на рис. 17.1.3. В силу особенностей восприятия света рецепторами не все цвета, видимые человеком, представимы в этой модели. Однако доля воспроизводимых цветов значительно больше, чем доля не представимых в этой модели.
Цветовая система CIE XYZ. Международный стандарт представления цвета CIE (CIE - Commission Internationale de l'Eclairage) был принят в 1931 году Международной комиссией по освещению, В нем определяются три базисные функции ρX(λ), ρY(λ), ρZ(λ), зависящие от длины волны, линейные комбинации которых с неотрицательными коэффициентами (X, Y и Z) позволяют получить все видимые человеком цвета. Этими функциями учитывается относительное восприятие интенсивности света рецепторами глаза. В трехмерном пространстве цветовая система CIE образует конус в первом квадранте и применяется для высококачественного отображения цветных изображений.
17.2. Геометрические преобразования растровых изображений [51, 1i]
Области и этапы преобразований. Изображения можно разделить на текстурные и детальные. В текстурных изображениях все отсчёты (элементы) несут информацию (изображение на экране телевизора). Детальным называется изображение, на котором можно выделить мешающие объекты, фон и полезные объекты.
Существуют три основные группы алгоритмов обработки изображений на компьютерах:
1. Первичная (предварительная) обработка изображений с целью реставрации, очистки от случайных шумов, улучшения качества, коррекции геометрических искажений оптических систем (расфокусировка, аберрации и пр.).
2. Описание изображений, распознавание образов. Выполняется для определения параметров деталей изображения и включает: нахождение однородных по уровню освещённости и цвету областей изображения, выделение признаков формы изображений, определение координат особых точек объектов и пр.
3. Эффективное кодирование для уменьшения объема при передаче и хранении.
Большинство методов первичной обработки основаны на использовании линейных пространственно-инвариантных (ЛПИ) фильтров. Линейные алгоритмы выполняются с помощью двумерных аналогов одномерных КИХ и БИХ фильтров. Их можно применять, например, при реализации фильтров для снижения уровня шума на изображениях.
КИХ фильтры реализуются методом свёртки. Преимуществом двумерных КИХ фильтров является наглядность, простота и абсолютная устойчивость. БИХ фильтры реализуются с помощью разностных уравнений и z-преобразований. Они более скоростные по сравнению с КИХ фильтрами, но могут оказаться неустойчивыми. Синтез двумерных БИХ фильтров отличается от синтеза одномерных, так как для двумерной функции в явном виде не удаётся выделить полюса.
Для реставрации изображений и улучшения их качества могут потребоваться и нелинейные методы. Так, например, чтобы подавить шум и при этом сохранить контурную часть изображений, приходится применять нелинейные или линейные пространственно-неинвариантные (ЛПНИ) фильтры, которые реализуются ранговыми алгоритмами. Все ранговые нелинейные фильтры основаны на быстрых алгоритмах вычисления локальных гистограмм.
Одним из таких методов является медианная фильтрация. Применение медианных фильтров эффективно для подавления некоторых видов шума и периодических помех без одновременного искажения сигнала, например, для подавления пачек шумовых выбросов, включая выпадение строк. Метод может применяться также при решении задач, связанных с распознаванием, например, для выделения тонких линий и небольших изолированных объектов.
Алгоритмы описания изображений и распознавания образов, как правило, нелинейны и носят эвристический характер. Признаками объектов обычно являются площадь изображения объекта, периметр контура изображения, отношение площади к квадрату периметра изображения. Форму объекта можно охарактеризовать радиусом вписанной в изображение или описанной вокруг изображения объекта окружности, длиной минимального и максимального радиус-вектора от “центра масс” изображения.
Дискретизация. Преобразования изображений в компьютере и хранение обработанных данных выполняются в дискретном виде. Для получения дискретного представления из непрерывных аналоговых изображений реального мира применяется дискретизация (sampling). Практически ее осуществляют устройства ввода (цифровой фотоаппарат, сканер или другие). Для визуального восприятия обработанных изображений на устройствах вывода (дисплей, плоттер и др.) осуществляется реконструкция аналогового изображения по его дискретизированному представлению.
В простейшем случае черно-белых изображений мы имеем двумерный массив sa(x, y). Для цветных изображений в модели RGB, учитывая свойство аддитивности при сложении цветов, каждый слой R, G и B также может рассматриваться и обрабатываться, как двумерный массив, с последующим суммированием результатов.
Из способов обобщения одномерной периодической дискретизации на двумерный случай наиболее простым является периодическая дискретизация в прямоугольных координатах:
s(n,m) = sa(nDx,mDy),
где Dx и Dy - горизонтальный и вертикальный интервалы дискретизации двумерного непрерывного сигнала sa(x,y) с непрерывными координатами x и y. Ниже значения Dx и Dy, как и в одномерном случае, принимаются равными 1.
Дискретизация двумерного сигнала также приводит к периодизации его спектра и наоборот. Сохраняется и условие информационной равноценности координатного и частотного представлений дискретного сигнала при равном количестве точек дискретизации в главных диапазонах сигнала. Для прямоугольной дискретизации прямое и обратное преобразование Фурье определяются выражениями:
S(k,l) = 
 s(n,m) exp(-jn2pk/N-jm2pl/M), (17.2.1)
s(n,m) exp(-jn2pk/N-jm2pl/M), (17.2.1)
S(k,l) = exp(-jn2pk/N) s(n,m) exp(-jm2pl/M), (17.2.1')
s(n,m) = 

 S(k,l) exp(-jn2pk/N-jm2pl/M). (17.2.2)
S(k,l) exp(-jn2pk/N-jm2pl/M). (17.2.2)
s(n,m) = exp(-jn2pk/N) S(k,l) exp(-jm2pl/M). (17.2.2')
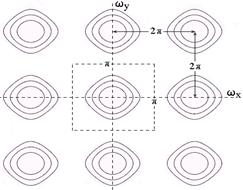 Рис. 17.2.1. Периодизация спектра.
Рис. 17.2.1. Периодизация спектра.
|
Эти выражения показывают, что двумерное ДПФ по прямоугольному растру дискретизации данных может вычисляться с помощью одномерных последовательных ДПФ. Вторые суммы выражений (17.2.1') и (17.2.2') являются одномерными ДПФ сечений функций s(n,m) и S(k,l) по линиям n и k соответственно, а первые - одномерными ДПФ вычисленных функций в сечениях по m и l. Другими словами, исходные матрицы значений s(n,m) и S(k,l) пересчитываются сначала в промежуточные матрицы с ДПФ по строкам (или по столбцам), а промежуточные - в окончательные с ДПФ по столбцам (или соответственно по строкам).
Для того чтобы периодическое повторение спектра (рис. 17.2.1), вызванное дискретизацией аналогового сигнала с частотой Fx=1/Dx и Fy=1/Dy, не изменяло спектр в главном частотном диапазоне (по отношению к спектру исходного аналогового сигнала), необходимо и достаточно, чтобы максимальные частотные составляющие fmax в спектре аналогового сигнала как по строкам, так и по столбцам, не превышали частоты Найквиста (fmax.x £ fN = Fx/2, fmax.y £ fM = Fy/2). Это означает, что частота дискретизации сигнала должна быть минимум в два раза выше максимальной частотной составляющей в спектре сигнала:
Fx ³ 2fmax.x, Fy ³ 2fmax.y, (17.2.3)
что обеспечивает выход спектральных функций на нулевые значения на концах главного диапазона спектра.
Интерполяционный ряд восстановления двумерного сигнала. Если непрерывный сигнал sa(x,y) является сигналом с ограниченным спектром, а периоды дискретизации выбраны достаточно малыми и спектры соседних периодов не перекрываются:
Sa(Wx,Wy) = 0 при |Wx|  p/Dx, |Wy| p/Dx,
p/Dx, |Wy| p/Dx,
то, как и в одномерном случае, сигнал sa(x,y) может быть восстановлен по дискретному сигналу с использованием двумерного аналога ряда Котельникова-Шеннона:
sa(x,y) = Sn Sm s(n,m)  . (17.2.4)
. (17.2.4)
Частотные искажения изображений и их устранение. Сигнал с неограниченным спектром также может быть дискретизирован, однако в этом случае имеет место наложение спектров в смежных периодах, при этом высокие частоты, большие частот Найквиста, будут "маскироваться", как и в одномерном случае, под низкие частоты главного периода. Эффект "отражения" от границ периода дает еще более сложную картину вследствие интерференции частот, отраженных по разным координатам. Аналогичный эффект, известный как алиасинг (aliasing) будет наблюдаться и при недостаточной частоте дискретизации изображений. Особенно наглядно этот эффект можно наблюдать на резких контрастных изменениях яркости.
Для борьбы с подобными явлениями применяют префильтрацию (антиалиасинг) – предварительную свертку аналогового изображения с весовой функцией фильтра, отсекающей высокочастотные компоненты, которые могут привести к алиасингу. В двумерном случае фильтрация описывается следующим образом:
z(x, y) = h(x', y') ③③ s(x-x', y-y'). (17.2.5)
Следует заметить, что аналоговые изображения существуют только в оптическом диапазоне, например, в виде светового отображения экране, фотобумаге или фотопленке, но не могут существовать в памяти компьютера. Поэтому физическое выполнение префильтрации возможно только при регистрации изображения путем его расфокусировки, что, как правило, не применяется. Первичная информация всегда должна регистрироваться с максимальной полнотой и точностью, а очистка первичной информации от излишних подробностей и избыточности – дело последующей обработки данных. Поэтому применительно к уравнению 17.2.5 двумерная префильтрация, в ее практическом исполнении, может представлять собой только фильтрацию изображений, дискретизированных с большим запасом по главному частотному диапазону (с излишней разрешающей способностью), и применяется, как правило, при передискретизации на более крупный шаг, например, при сжатии изображений. Префильтрация может встраиваться также в алгоритмы построения изображений.
 Рис. 17.2.2.
Рис. 17.2.2.
|
На практике при этом обычно используются двумерные аналоги весовых функций, применяемых при обработке одномерных сигналов (Ганна, Хемминга, Гаусса и др.). Как правило, фильтры h(x', y') имеют либо радиальную, либо осевую симметрию. На рис. 17.2.2 приведен пример исходного изображения и изображения после выполнения префильтрации.
 Рис. 17.2.3. Примеры весовых функций.
Рис. 17.2.3. Примеры весовых функций.
|
На рис. 17.2.3 и ниже, в таблице 17.2.1 приведены примеры наиболее распространенных одномерных фильтров для антиалисинга. Они могут выполняться и в виде аналоговых фильтров, и применяться, например, при передаче телевизионных строк изображений в аналоговой форме по радиоканалам (антиалиасинг по горизонтали). В принципе, подобная же операция может выполняться и по столбцам (дубль- изображение), и после суммирования изображения будет выполнена полная операция антиалисинга, но такой метод относится больше к области специальных научных исследований.
Таблица 17.2.1.
Основные весовые функции
| Временное окно | Весовая функция | Фурье-образ |
| Естественное (П) | П(t) = 1, |t|£t; П(t) = 0, |t|>t | П(w) = 2t sinc[wt] |
| Бартлетта (D) | b(t) = 1-|t|/t | B(w) = t sinc2(wt/2). |
| Хеннинга, Ганна | p(t) = 0.5[1+cos(pt/t)] | 0.5П(w)+0.25П(w+p/t)+0.25П(w-p/t) |
| Хемминга | p(t) = 0.54+0.46 cos(pt/t) | 0.54П(w)+0.23П(w+p/t)+0.23П(w-p/t) |
| Карре (2-е окно) | p(t) = b(t) sinc(pt/t) | t·B(w)*П(w), П(w) = 1 при |w|<p/t |
| Лапласа-Гаусса | p(t) = exp[-b2(t/t)2/2] | [(t/b)  exp(-t2w2/(2b2))] ③ П(w) exp(-t2w2/(2b2))] ③ П(w)
|
Двумерные аналоги одномерных фильтров f1(x) строятся в двух вариантах симметрии: или как функция от радиуса:
f2(x, y) = f1( ),
),
или как произведение:
f2(x, y) = f1(x) × f1(y).
Первый вариант - более корректный, но второй обладает свойством сепарабельности, т.е. двумерную свертку можно выполнять двумя одномерными свертками последовательно по строкам с f1(x) и по столбцам с f1(y).
Передискретизация изображения или ресамплинг (resampling) – это изменение частоты дискретизации цифрового сигнала. Применительно к цифровым изображениям это означает изменение размеров изображения.
Существуют различные алгоритмы ресамплинга изображений. Например, для увеличения изображения в 2 раза методом билинейной интерполяции (bilinear interpolation) промежуточные столбцы и строки получают линейной интерполяцией значений соседних столбцов и строк. Можно каждую точку нового изображения получить как взвешенную сумму большего числа точек исходного изображения (бикубическая и другие виды интерполяции). Наиболее качественный ресамплинг получается при использовании алгоритмов, учитывающих не только временную, но и частотную область сигнала.
Рассмотрим алгоритм ресамплинга с максимальным сохранением частотной информации изображения. Работу алгоритма будем рассматривать на одномерных сигналах, так как двумерное изображение можно сначала растянуть или сжать по горизонтали (по строкам) а потом – по вертикали (по столбцам), и свести ресамплинг двумерного изображения к ресамплингу одномерных сигналов.
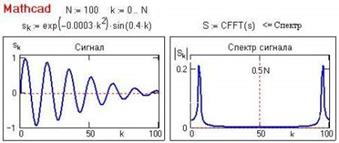 Рис. 17.2.4.
Рис. 17.2.4.
|
Допустим, мы имеем одномерный сигнал (рис. 17.2.4), заданный на интервале 0-Т и дискретизированный с шагом Dt=1 (N интервалов). Нужно «растянуть» сигнал в m раз. Спектр сигнала, показанный на рисунке, вычисляется быстрым преобразованием Фурье (БПФ, количество отсчетов спектра равно количеству отсчетов сигнала) и приводится в главном диапазоне БПФ (0-2p, частота Найквиста wN = p/Dt = p, или 0.5N по нумерации отсчетов спектра при шаге по спектру Df = 1/T или Dw = 2p/T). Для выполнения растяжения необходимо выполнить 2 шага.
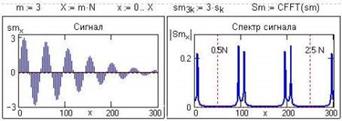 Рис. 17.2.5.
Рис. 17.2.5.
|
Первый шаг – интерполяция нулями, увеличивающая длину сигнала в m раз. (рис. 17.2.5). Нужно умножить все отсчеты исходного сигнала на m, а потом после каждого отсчета сигнала вставить m-1 нулевое значение. На интервале 0-Т, значение которого остается без изменения, теперь располагается в m-раз больше интервалов дискретизации (mN), и новый шаг дискретизации будет равен Dx=Dt/m. Соответственно, новая частота Найквиста для этого сигнала равна mp/Dt = mp. Но физическая величина шага по спектру в единицах частоты обратна физической величине интервала задания сигнала (Df=1/T), и, следовательно, БПФ по mN точкам сигнала вычислит mN точек спектра в главном диапазоне БПФ 0-2pm с шагом спектра исходного сигнала, в котором будут присутствовать m-периодов спектра исходного сигнала (один главный и m-1 боковых).
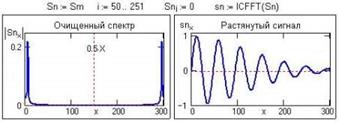 Рис. 17.2.6.
Рис. 17.2.6.
|
Второй шаг – отфильтровывание боковых диапазонов спектра с помощью НЧ-фильтра или во временной, или в спектральной области. На рис. 17.2.6 выполнены очистка спектра и обратное преобразование Фурье, в результате чего получен сигнал в m раз длиннее исходного с полным сохранением всей частотной информации.
По аналогичному принципу может быть построен и алгоритм сжатия (децимации) сигнала в n раз, при этом порядок шагов изменяется на обратный. При сжатии сигнала выполняется увеличение шага дискретизации сигнала и, соответственно, уменьшение частоты Найквиста, при этом отрезаемые высокие частоты (шумы и незначимые высокочастотные части спектра сигнала) будут отражаться от границы главного диапазона и суммироваться с основной информацией, создавая искажения. Для исключения этого явления сначала проводят низкочастотную фильтрацию сигнала с частотой среза, равной новой частоте Найквиста (антиалиасинг), и только затем децимацию сигнала путем прореживания.
При выполнении ресамплинга только во временной области алгоритмы растяжения и сжатия объединяют, как правило, в единый последовательный процесс с заданием изменения шага дискретизации в виде отношения m/n, что позволяет задавать целые значения m и n при дробных значениях изменения шага дискретизации. Это существенно упрощает алгоритмы и повышает эффективность и качество их работы. Так например, при растяжении сигнала в 1.5 раза при m/n = 3/2 сигнал сначала растягивается в 3 раза (простое и равномерное дополнение нулями всех отсчетов, затем выполняется НЧ-фильтрация, после чего сигнал прореживается в два раза. Антиалиасингового фильтра не требуется, т.к. частота его среза перекрывается частотой первого НЧ-фильтра. При обратной операции сжатия (например, m/n = 2/3), аналогично используется только антиалиасинговый фильтр.
17.3. фильтрация изображений [49, 1i]
Под фильтрацией изображений понимают операцию, имеющую своим результатом изображение того же размера, полученное из исходного по некоторым правилам. Обычно интенсивность (цвет) каждого пикселя результирующего изображения обусловлен интенсивностями (цветами) пикселей, расположенных в некоторой его окрестности в исходном изображении.
Правила фильтрации могут быть самыми разнообразными. Фильтрация изображений является одной из самых фундаментальных операций компьютерного зрения, распознавания образов и обработки изображений. С той или иной фильтрации исходных изображений начинается работа подавляющего большинства методов обработки изображений.
Линейные фильтры имеют очень простое математическое описание. Будем считать, что задано исходное полутоновое изображение A, и обозначим интенсивности его пикселей A(x, y). Линейный фильтр определяется вещественнозначной функцией h (ядром фильтра), заданной на растре. Сама фильтрация производится при помощи операции дискретной свертки (взвешенного суммирования):
B(x, y) = h(i, j) ③③A(x, y) = 
 h(i, j) A(x-i, y-j). (17.3.1)
h(i, j) A(x-i, y-j). (17.3.1)
Результатом служит изображение B. Обычно ядро фильтра отлично от нуля только в некоторой окрестности N точки (0, 0). За пределами этой окрестности h(i, j) равно нулю, или очень близко к нему и им можно пренебречь. Суммирование производится по (i, j) Î N, и значение каждого пикселя B(x, y) определяется пикселями изображения A, которые лежат в окне N, центрированном в точке (x, y) (обозначение - множество N(x, y)). Ядро фильтра, заданное на прямоугольной окрестности N, может рассматриваться как матрица m на n, где длины сторон являются нечетными числами. При задании ядра матрицей ее следует центрировать. Если пиксель (x, y) находится в окрестности краев изображения, то координаты A(x-i, y-j) для определенных (i, j) могут соответствовать несуществующим пикселям A за пределами изображения. Данную проблему можно разрешить несколькими способами.
|
|
|
|
|
Дата добавления: 2015-06-28; Просмотров: 572; Нарушение авторских прав?; Мы поможем в написании вашей работы!