КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Причины и источники вибрации
|
|
|
|
В качестве основных параметров, характеризующих вибрации, принимаются: вибросмещение S, мкм; виброскорость V, м/с; виб-Р°Ускорение а, м/с2. Достаточно часто для анализа вибрационных процессов в качестве измеряемой величины используют эффектив-ное значение виброскорости Vэфф
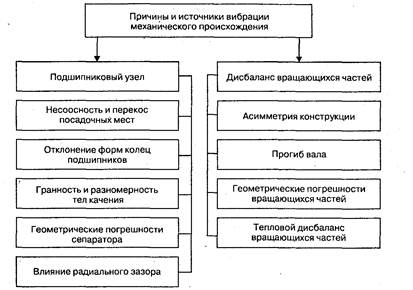
Рис. 5.29. Причины и источники вибрации механического происхождения
Точность измерения вибрации во многом зависит от измерительной аппаратуры, выбора точек измерения, условий измерений и др. В большинстве случаев вибрационные характеристики можно измерять с помощью аппаратуры, предназначенной для измерения акустических характеристик, заменив микрофон электродинамическим, индукционным или пьезоэлектрическим датчиком.
Пьезоэлектрические датчики (акселерометры) получили широкое распространение в технике и мониторинге вибрационного загрязнения окружающей среды. Следует заметить, что конструктивное исполнение современных акселерометров чрезвычайно разнообразно. Они имеют различные массогабаритные показатели, способы закрепления, собственные частоты, чувствительности и т.д. Для снижения погрешности измерения виброизмерительные датчики необходимо жестко крепить в точке измерения, причем масса вибропреобразователя (датчика) не должна превышать 5% массы испытуемого изделия.
Вибропреобразователи преобразуют механические колебания в электрические сигналы. Эти сигналы поступают в приборы, которые позволяют получать как интегральные характеристики (вибросмещение S, мкм; виброскорость V, м/с; виброускорение а, м/с2), так и спектральные составляющие.

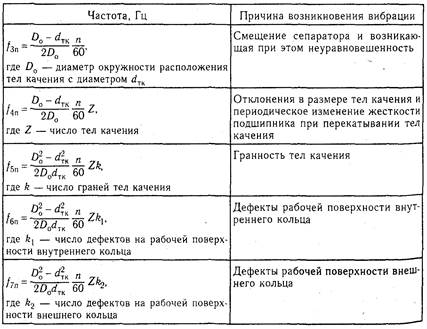
Рис. 5.30. Технологические погрешности подшипников
Основными источниками возникновения механических вибраций машин и механизмов являются подшипниковые узлы и неуравновешенность вращающихся частей (рис. 5.29). Вибрации, возникающие в подшипниковых узлах, обусловлены циклическим характером изменения жесткости тел качения подшипников. Цик-' личность изменения жесткости обусловлена технологическими погрешностями изготовления и сборки машин и механизмов. Центробежные силы, вызванные неуравновешенностью вращающихся масс, действуют на подшипники. В результате действия динамических сил возникают вибрации в поперечной плоскости. В процессе работы тела качения находятся в разных условиях нагружения. Периодические деформации шариков или роликов при перекатывании вызывают затухающие колебания в кольцах и в сепараторе подшипников. Эти колебания передаются от подшипников к сопряженным с ними деталям. Не следует забывать о возможности возникновения Резонансных явлений, в результате которых значительно увеличиваются амплитуды колебаний. Резонанс приводит к быстрому изно-су или разрушению подшипников.
На рис. 5.30 перечислены основные технологические погрешнос-ти вызывающие повышенные вибрации подшипниковых узлов. От-клонения размеров и форм деталей в подшипниковых узлах ведут к
возникновению низкочастотных составляющих вибрации. Частоты, на которых проявляются вибрации, обусловленные различными технологическими отклонениями, можно достаточно легко рассчитать, используя геометрические параметры подшипников. Например: • разностепенность колец вызывает вибрации с частотой

где п — частота вращения вала, об/мин;
• овальность внутренних колец является источником вибрации с двойной частотой вращения:

В табл. 5.20 приведены аналитические выражения, позволяющие рассчитать частоты вибрации других частей подшипника, вызванной различными конструктивно-технологическими причинами. Увеличение габаритных размеров подшипников ведет к увеличению вибрации.
Таблица 5.20
Большое влияние на характер колебательных (вибрационных) процессов оказывает остаточная неуравновешенность вращающихся частей. Под действием остаточной неуравновешенности и при наличии радиального зазора вал прецессирует, и в результате возникают ударные взаимодействия вала с телами качения. Характер движения шейки вала определяется коэффициентом неуравновешенности

где Р — динамическая нагрузка на подшипник от неуравновешенных сил инерции; Q — статическая нагрузка, причем Q = тпс; тпс — масса подвижной системы.
Неуравновешенность вращающихся частей Δ т пропорциональна массе уравновешивающих грузов mдо6 и радиусу их установки r. Для удобства сравнения различных вращающихся деталей (роторов) вводят понятие относительной неуравновешенности е:

где mp — масса ротора.
Проведем анализ вибрационных процессов при наличии дисбаланса вращающихся частей на примере электрической машины (ЭМ), закрепленной на упругом основании. Уравнение собственных колебаний ЭМ (электродвигателя) в вертикальной плоскости имеет вид

где тД — масса электродвигателя; k — жесткость упругого элемента; x — радиальное смещение.
Собственная частота ЭМ определяется из уравнения

Центробежная сила Рц при вращении ротора со статическим дисбалансом определяется из уравнения

Согласно требованиям ГОСТ собственная частота ЭМ, установленной на упругом основании не превышает 3 Гц. Тогда

Продифференцировав полученное выражение, найдем значение эффективной виброскорости Vэфф, мм/с, в любой точке корпуса ЭМ:

|
При чисто динамическом дисбалансе

|
где о) = 2 πn /60 — угловая частота; тр —. масса ротора; I — момент инерции относительно горизонтальной оси, проходящей через центр тяжести и перпендикулярной оси вращения; l — расстояние между балансировочными осями (оси или плоскости, на которых устанавливаются балансировочные грузы); L1 — расстояние между подшипниками.
Радиальная (вертикальная) составляющая центробежной силы

|
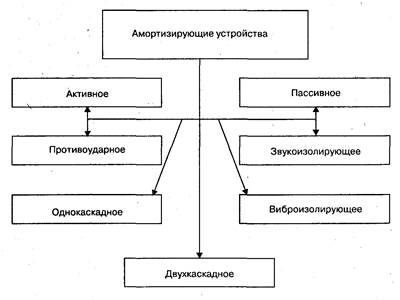
Рис. 5. 31. Амортизирующие устройства

|
| Для инженерных расчетов и экспертных оценок можно пользоваться аналитическим выражением |

|
Значение радиального смещения x электрической машины относительно центра тяжести определяется из дифференциального уравнения движения:
где L — длина однородного цилиндра, которым заменяется ЭМ; Dl — внешний диаметр пакета (магнитопровода) статора.
Подавляющее большинство машин и механизмов устанавливают на специальные амортизирующие устройства, которые позволяют устранить непосредственный контакт машин и механизмов с окружающими конструкциями (рис..5.31).
Во многих случаях эффективность снижения вибрации, передаваемой от машин и механизмов окружающим конструкциях, достигается применением антивибраторов. Антивибраторы представляют собой стержни с дисками (грузами), перемещением которых достигают точной настройки антивибраторов на нужную частоту.
|
|
|
|
|
Дата добавления: 2015-06-28; Просмотров: 2783; Нарушение авторских прав?; Мы поможем в написании вашей работы!