КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Управление по закрытому контуру регулирования
|
|
|
|
Зачатки противоположных идей относительно кольцевого или замкнутого (закрытого) контура регуляции движений мы находим у В. Джемса, Ч. Шеррингтона и др.
Джемс предположил, что периферическая обратная связь от одной части движения вызывает к действию следующую, и выдвинул гипотезу «цепных рефлексов», против которой позже выступил Лешли. В соответствии с теорией закрытого контура предполагается, что ответ не просто запускается рецепторикой, но и управляется ею.
Управление движением по «закрытому» контуру предполагает передачу с помощью обратных связей информации о соответствии движения требуемой цели и выработку на основе этого новых управляющих команд. Обратная связь выполняет две функции: с ее помощью определяются пространственные характеристики цели, необходимые для составления программы баллистического движения, а также осуществляется соотнесение результатов выполнения этих программ с истинным положением цели, служащее для уточнения программ последующих движений. Наиболее полная аргументация того, что жесткое программирование не может обеспечить целесообразный эффект движения, дана Н. А. Берн штейном.
Теория Н. А. Бернштейна охватывает широкий класс функционально-различных движений и представляет собой общую теорию поуровневого управления и построения движений человека. Эта теория включает в себя три фундаментальных принципа: центрального программирования, сенсорных коррекций и уровневой организации движений. Принцип координирования движений изложен им в безупречной с точки зрения современной теории автоматического регулирования форме: «... как только орган, находящийся под действием внешних и реактивных сил, плюс еще какая-то добавка внутренних, мышечных сил, отклонится в своем результирующем движении от того, что входит в намерения центральной нервной системы, эта последняя получит исчерпывающую сигнализацию об этом отклонении, достаточную для того, чтобы внести в эффекторный процесс собственные адекватные поправки. Весь изложенный принцип координирования заслуживает поэтому названия принципа сенсорных коррекций» [6, с. 28].
Н. А. Бернштейн долгое время решительно отвергал всякую возможность управления движением по разомкнутой схеме. Однако позже он отошел от такой крайней точки зрения и допустил возможность того, что в некоторых элементарных процессах дуга не замыкается в рефлекторное кольцо либо из-за кратковременности акта, либо вследствие его крайней элементарности.
Сенсорные коррекции осуществляются в общем случае всеми имеющимися в распоряжении организма рецепторными аппаратами. В частных случаях некоторые из обратных связей могут не участвовать в управлении движением. Первичные сигналы рецепторов предварительно подвергаются сложной обработке и «перешифровке», необходимой, например, для того, чтобы их можно было сличить с проектом движения, построенным на языке пространственно-кинематических представлений. Полученные в результате обработки «синтезы», составленные из сигналов всех видов обратных связей, участвующих в управлении данным движением, служат для сенсорных коррекций.
Понятие о сенсорном синтезе играет в модели Бернштейна фундаментальную роль. Состав образующих его афферентаций, т. е. обратных связей, и принцип их объединения служат главным критерием, отличающим один уровень построения движения от другого.
Каждая двигательная задача находит себе в зависимости от своего содержания и смысловой структуры тот или иной ведущий уровень. Уровни различаются между собой не только видом сенсорного синтеза, но и анатомическим субстратом, т. е. совокупностью органов нервной системы, без которых осуществление функции этого уровня невозможно.
В зависимости от цели и смыслового содержания двигательного акта один из уровней берет на себя роль ведущего, координирующего действия нижележащих фоновых уровней. Во всяком движении осознается только ведущий уровень.
Выработка двигательного навыка — это процесс формирования в ходе обучения и тренировки уровневого состава движения, выделения ведущего уровня и срабатывания между собой всех вовлеченных в управление уровней.
Необходимым условием успешного изучения двигательных актов является создание адекватного метода, позволяющего регистрировать и анализировать пространственно-временную развертку движения, весь ход двигательного акта «по всему моторному аппарату тела».
В исследованиях исполнительной деятельности, направленных на выявление объективных индикаторов процесса формирования сенсомоторного образа пространства и структуры действия, использовался микроструктурный метод анализа, суть которого состоит в выделении быстротекущих компонентов целостных психических актов и в анализе их взаимоотношения. Использование этого метода при исследовании произвольных пространственных действий позволило вскрыть структуру пространственного действия; проследить динамику ее становления и развития в различных условиях протекания действий; выделить ряд компонентов-стадий: формирования программы, реализации, контроля и коррекций, составляющих структуру действия, проследить динамику их развития, соотношения их на разных этапах освоения действия, а также изменения, происходящие внутри выделенных компонентов целостного действия.
Экспериментальная ситуация предусматривала исследование формирования инструментального пространственного действия в различных условиях.
· В стабильных условиях маршруты требуемого движения были одинаковой величины и сложности.
· В динамических условиях маршруты отличались числом опорных элементов и числом пространственных составляющих движения.
· В условиях инверсии вводилось рассогласование (полное или частичное) между перцептивным и моторным полями. Инверсия вводилась после выработки навыка в условиях нормы.
В результате исследования было обнаружено, что в процессе формирования навыка (стабильные условия, норма) наблюдается сложная динамика во взаимоотношениях между отдельными стадиями целостного действия.
Во-первых, в процессе освоения пpoстранственного действия наблюдается уменьшение времени каждой выделенной стадии; во-вторых, сокращение времени в каждой стадии происходит неравномерно, в-третьих, по мере тренировки происходит перераспределение времени между выделенными стадиями.
Неравномерность темпа сокращения времени в выделенных стадиях свидетельствует о том, что все компоненты целостного действия совершенствуются неодинаково.
В исследовании обнаружена последовательность формирования компонентов пространственного действия. Быстрее всего складывается стадия формирования моторных программ, за ней следует стадия контроля и коррекций, обе они формируются на фоне постепенного уменьшения времени, которое занимает стадия реализации моторных программ.
Лишь после того как оба когнитивных компонента сформировались, видимо, возможно, последнее сокращение времени выполнения действия в целом. И это сокращение происходит за счет его исполнительной части. Перераспределение времени между стадиями внутри целостного действия на разных этапах формирования свидетельствует о том, что каждое новое упражнение — это новый процесс решения задачи, процесс изменения и совершенствования средств и способов ее решения.
Знание функциональной структуры действия, исследование динамики ее формирования и становления, установление взаимосвязей и взаимоотношений между компонентами исследуемого объекта открывают возможности контроля за процессом формирования и оптимизации движений и действий.
Изменение удельного веса компонентов в структуре действия как в процессе его формирования, так и под влиянием тех или иных изменений, внесенных в условия его протекания, свидетельствует о том, что превалирование того или иного типа регулирования двигательными актами зависит в основном от условий, в которых действие протекает, и от степени освоенности, обученности. На рис. представлены удельные веса компонентов целостного действия в различных условиях его протекания и на разных этапах его формирования.
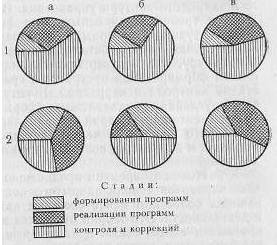
| а – в стабильных условиях; б – в динамических условиях; в – в условиях инверсии 1 – начало обучения 2- конец обучения |
Соотношение компонентов функциональной структуры целостного действия в начале его формирования сходно независимо от того, в каких условиях протекает действие. В конце формирования сходное соотношение компонентов в структуре действия отмечается у действий, формируемых в динамических и инвертированных условиях; действие, формируемое в условиях нормы, имеет совершенно отличную от них структуру.
Ситуация инверсии и динамики и ситуация нормы могут быть сопоставлены в терминах открытого и закрытого контура управления.
В условиях нормы после длительной тренировки у испытуемых формировались симультанный образ ситуации и программа, организующая моторный ответ, т. е. значительная часть действия осуществлялась как бы по открытому контуру, что подтверждается значительным удельным весом стадии формирования программ и сравнительно небольшим весом стадии контроля и коррекций.
В ситуации инверсии[5] и в динамических условиях предъявления информации в течение проведенных экспериментальных серий сохранилась регуляция по принципу замкнутого контура, о чем свидетельствует удельный вес стадии контроля и коррекций, составляющей примерно 50% от целостного действия.
К настоящему времени предложено большое число разнообразных вариантов теорий закрытого контура регулирования, описывающих более или менее сложные акты человеческого поведения и деятельности. Эти теории относятся к таким процессам, как дискретные и непрерывные двигательные процессы, перцептивно-моторные навыки, речевое поведение и т. д.
В настоящее время созрели как теоретические, так и методические предпосылки для преодоления оппозиции между теориями открытого и закрытого контура. Теоретические предпосылки состоят в том, что во многих областях исследования психической деятельности успешно преодолевается технологический, инженерный подход, в том числе и в его современном информационно-кибернетическом варианте.
Методические предпосылки состоят в том, что благодаря использованию ЭВМ на линии эксперимента появились принципиально новые возможности регистрации и анализа движений.
В качестве примера приведем исследование, предметом которого был анализ соотношений когнитивных и исполнительных компонентов инструментального действия.
Экспериментальная ситуация предусматривала быстрое и точное горизонтальное движение к цели, представляющей собой световой квадрат, равный по размеру управляемому квадрату и появляющийся справа и слева от стартовой позиции на горизонтальной оси телевизионного индикатора по программе от ЭВМ. Регистрировались временные и скоростные характеристики движения.
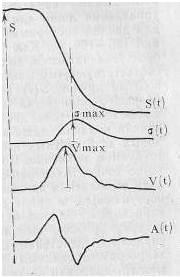
На рисунке 12 представлен образец записи перехода на цель, включающий в себя запись параметрического графика зависимости пути от времени, данные по скорости и ускорению совершаемого движения. Данный вид кривых S (t), V(t), A(t) описывает движения, направленные на быстрое и точное совмещение управляемого пятна с целью.
Скорость движения возрастает до середины пути, а затем начинает монотонно падать вплоть до начала корректирующих движений, подводящих управляемое пятно к цели. Изменение скорости движения, в свою очередь, вызвано тем, что усилие, прилагаемое для перемещения руки в пространстве и соответственно орудия, управляемого ею, изменяется во времени.
Характер изменения этого усилия описывается изменением ускорения движения во времени A(t), где можно выделить ускоренную часть, соответствующую начальной части движения, когда скорость нарастает от 0 до максимума, и части движения, когда ускорение имеет отрицательный знак.
Одновременно для каждой группы реализаций (в зависимости от амплитуды перемещения) был вычислен средний квадратичный разброс (а), т. е. определены участки максимального и минимального отклонения от идеальной кривой.
Как показал анализ, максимальное отклонение на кривой (а) отмечено в середине пути там, где, как видно на кривой скорости, она уже достигла своего максимума. Иначе говоря, разброс минимален в начале и конце пути.
Отсюда можно предположить. что движения в самом начале своего пути, соответствующие по времени фазе >нарастания ускорения и характеризующиеся минимальным разбросом (а), совершаются по четко отработанной программе для данной группы движений.
Эти данные согласуются с данными представителей программного или открытого типа управления движениями, постулирующих наличие набора моторных программ, которые могут синтезироваться в желаемое движение, охватить его целиком и которые не зависят от обратной афферентации.
Результаты проведенного исследования свидетельствуют о наличии программного типа управления лишь для начальной части движения, составляющей для данной экспериментальной ситуации и данной группы движений 125—150 мс. Как было.показано, средний квадратичный разброс увеличивается, доходя до своего максимума на участке пути, соответствующему максимальному значению скорости, охватывающей на кривой S (t) интервал, равный 225—275 мс.
Вследствие большого количества степеней свободы кинематических цепей человеческого тела, действия реактивных и внешних сил и других причин никакая, даже наиболее точно дозированная, система пусковых афферентных импульсов не может однозначно определить требуемое движение. Но движение все-таки совершается, и достаточно точно, и совершается оно с помощью внесения поправок по ходу выполнения движения, на основе эфферентной сигнализации, поступающей в процессе двигательного акта, путем «сенсорной коррекции».
Однако одних импульсов, поступающих в нервную систему по ходу выполнения движения, еще недостаточно для управления действием, они должны сопоставляться с заданными, запрограммированными их значениями, что и дает возможность вносить поправки по ходу выполнения действия; на основе такого сличения и производится коррекция двигательного акта. Иначе говоря, имеются основания для объединения в одном двигательном акте двух типов управления: программного и на основе обратной афферентации, т. е. закрытого типа управления.
Сами представления о моторной программе и об обратной связи, являющиеся центральными в этих теориях, тоже нуждаются в объяснении, тем более, что они рассматриваются в этих теориях преимущественно со стороны их физиологических механизмов.
А между тем современные исследования открывают в человеческом действии такие осложнения, вариации и направления, о которых не знают биомеханика и физиология, по крайней мере в их нынешнем состоянии.
Главное осложнение состоит, видимо, в том, что как программа, так и контроль являются производными от образа, равно как и образ является производным от действия с предметом. Это не логический круг, поэтому разрывать его не нужно, но понять взаимоотношения между действием и образом необходимо; без этого невозможно решить проблему построения движений. Мы не случайно привели выше высказывание И. М. Сеченова о том, что чувствования служат источниками движений не прямо, а через психику, т. е. через образ, который сам является не менее динамичным, чем регулируемое им движение.
Понимание этого обстоятельства кардинально отличает теорию Н. А. Бернштейна от теорий открытого и закрытого контура. Рассматривая функции «задающего» элемента, он совершенно справедливо ставит вопрос о происхождении макропрограммы целевого действия и о связи ее с двигательной задачей. Последняя прямо или косвенно определяется ситуацией, сложившейся к данному моменту.
В качестве определяющего фактора в возникновении и формировании макропрограммы двигательного акта в теории Бернштейна выступает образ или представление результата действия (конечного или поэтапного).
Теория перцептивных действий [6]
Важным этапом в исследовании произвольных движений и навыков было обращение к их ориентировочно-исследовательским, когнитивным компонентам.
А. В. Запорожец показал, что в процессе ориентировочно-исследовательской деятельности складывается образ ситуации и тех действий, которые должны быть осуществлены. Особенно существенным является вклад ориентировки на начальных стадиях формирования произвольных движений. Логика исследования привела А. В. Запорожца и его сотрудников к дифференциации ориентировочно-исследовательских, пробующих и собственно-исполнительных действий.
Появились новые аргументы в пользу полифункциональности движений, которые могут выполнять как исполнительные, так и когнитивные функции, что привело к созданию теории перцептивных действий, были разработаны методы микроанализа когнитивных, в том числе и перцептивных процессов. При этом собственно-исполнительные действия анализировались в самом общем виде: оценивались лишь время их реализации и точность достижения цели.
Развитие теории и методического арсенала исследования перцептивных действий позволяет поставить задачу объединения целого ряда подходов к исследованию произвольных движений и навыков: теории построения и развития движений Н. А. Бернштейиа и А. В. Запорожца, теорий открытого и закрытого контура (вместе с различными вариантами их объединения) и теории перцептивных действий.
Первая попытка такого объединения была сделана на основе методов микроструктурного анализа исполнительной и познавательной деятельности.
В качестве существенного теоретического основания необходимости и полезности объединения названных концепций выдвигалось следующее.
При построении движений происходит преодоление избыточных степеней свободы кинематических цепей человеческого тела. Не лишено оснований предположение, что имеется нечто общее между задачей построения движений и задачей построения зрительного образа.
При построении образа также происходит преодоление избыточных и неадекватных вариантов отображения одного и того же объекта. С точки зрения регуляции и контроля произвольных движений, видимо, иначе и не может быть, поскольку зрительная система представляет собой существенную часть регулирующего звена двигательного акта. Поэтому в регулирующем звене (кстати, не обязательно связанном только со зрительной системой) должно быть не меньшее число степеней свободы, чем в исполнительном. В противном случае ряд степеней свободы исполнительного звена обязательно будет ускользать от регулирующего.
Именно поэтому исходя из принципа иннервации[7] отдельных мышц нельзя объяснить целостный акт движения, нельзя говорить об однозначных связях между иннервационными импульсами и вызываемыми ими движениями.
Близкие по смыслу идеи высказывает М. Турвей, считающий, что целесообразные движения регулируются не жестким (заранее готовым) паттерном (шаблон), а образом действия, который сам является постоянно становящейся структурой.
Мало вероятно, что для каждого способа выполнения движения существует готовый регуляторный паттерн, тем более, что без предварительного научения возможно применение многих способов выполнения движений и действий.
Движение реализуется путем подгонки друг к другу координируемых структур, которые являются относительно автономными с точки зрения организации движения.
Собственно становление движения может быть понято как гетерархия[8], в высших областях которой имеется малое количество больших и сложных координируемых структур, а в низших — большое количество маленьких и простых структур.
Турвей также считает, что центральное место в организации движения занимает образ предстоящего действия или представление о нем. В соответствии с таким пониманием процесса управления движением первоначальное представление о действии обязательно должно быть неопределенным в сравнении с его окончательным представлением в исполнительных командах для мышц.
Проще говоря, «образ действия» не может и не должен быть конструктивным по отношению к конкретным деталям двигательного акта.
В образ действия входят обобщенная оценка позы или схемы тела и выделенные перцептивные свойства, которые могут понадобиться для управления движением, представленные также в обобщенной форме. В разворачивающемся движении «образ действия» постепенно конкретизируется на последующих уровнях управления движением путем внесения в него детализированного предметного содержания.
Причем объединение координированных двигательных структур на каждом уровне происходит с помощью соответствующих, зрительно выделенных свойств внешней среды.
Необходимо установить, каким образом и на основании чего формируется новая для данного индивида деятельность, какова ее функциональная структура и каковы компоненты, ее составляющие.
Для ответа на поставленные вопросы в экспериментальной ситуации была использована инверсия как средство разрушения сложившегося навыка, при введении которой перцептивные и моторные поля, каждое в отдельности, по сути дела не претерпевали никаких изменений.
Нарушалось лишь соответствие между движением манипулятора и перемещением пятна на экране, иначе говоря, в инверсии нарушалось привычное соотношение перцептивного и моторного полей, что, естественно, вызывало разрушение сложившегося в условиях совместимости сенсомоторного образа пространства, т. е. средства стали неадекватны цели. Использование инверсии дало возможность более полно проследить этапы построения нового сенсомоторного образа рабочего пространства.
Остановимся подробнее на строении фазической стадии пространственного действия, которая при введении инверсии из пространственной, единой и целенаправленной превратилась в набор большого количества разнонаправленных движений, перемежающихся либо полными остановками, либо значительными замедлениями.
Каждая такая остановка говорит о том, что, сделав небольшое движение, испытуемый контролирует себя и намечает (программирует) свой дальнейший путь (рис.).
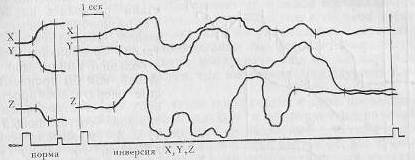
По сути дела, в структуре фазы при переходе на один элемент матрицы можно насчитать 3—8 полных циклов, каждый из которых состоит из своих собственных стадий программирования, реализации и контролирования.
Иначе говоря, фазическая стадия целостного действия распалась на целый ряд разнонаправленных движений, а если учесть, что такие разнонаправленные с большой амплитудой движения, как бы пронизывающие оперативное пространство, зарегистрированы по каждой составляющей X, Y, Z пространственного действия, то станет ясно, насколько хаотично и беспорядочно выглядит это действие, которое по сути дела нельзя назвать действием, 'поскольку оно не целенаправлено и раздроблено.
Его можно представить себе как искусственно соединенные цепи отдельных операций, каждая из которых имеет определенные направления, скорость и точку приложения.
Отсюда совершенно ясно, что исконная функция движения — исполнительная — трансформируется на этом этапе овладения действием в функцию познавательную, исследовательскую, ориентирующую.
Таким образом, на основе активных действий, прощупывающих рабочее пространство во всех направлениях, функция которых не исполнительная, а исследовательская, начинает строиться новый сенсомоторный образ пространства.
На первом этапе построения сенсомоторного образа формируется достаточно обобщенный образ ситуации в целом (рис., кривая 1), который можно назвать этапом построения образа конкретной ситуации.
Следующий этап характеризуется большой временной протяженностью, занимая примерно несколько десятков реализаций.
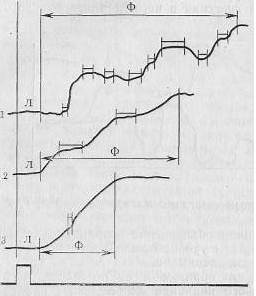
Этот этап характеризуется прощупывающими движениями, идущими в направлении цели (рис., кривая 2). Здесь уже нет разнонаправленных движений большой амплитуды. Движение от одного элемента матрицы к другому как бы делится на ряд последовательных операций, в каждой из которых отчетливо выделяются программирующая, реализующая и контролирующая стадии.
Испытуемый как бы квантует воображаемую траекторию на мелкие отрезки, где нарастание скорости осуществления действия сменяется полными остановками. И квантов тем больше, чем менее освоен образ пространства.
Необходимо отметить, что увеличение и падение скорости идет изолированно по каждой составляющей X, Y, Z движения. Это свидетельствует о том, что и на этом этапе освоения образа действие планируется не симультанно (пространственно), а сукцессивно, изолированно по каждой координате. Более того, даже по отдельной координате оно не планируется полностью, а делится на кванты, где окончание предыдущего служит началом следующего.
Единое действие на этом этапе превращено в цепь последовательных, пробующих операций, идущих в направлении заданной цели и в конце концов достигающих ее. Подобные действия необходимы для подгонки сложившегося в общих чертах образа к конкретным двигательным задачам. Кроме того, видимо, они направлены на нахождение масштабного соответствия движения руки и местоположения элемента матрицы на экране.
Таким образом, второй этап овладения сенсомоторным пространством можно назвать этапом построения образа реальных исполнительных действий.
Следующий этап освоения образа сенсомоторного пространства может быть отнесен к образной, ориентирующей части действия только на самых начальных этапах своего формирования (рис., кривая 3).
Он характеризуется целенаправленными целостными действиями, функция которых в основном направлена на слияние уже построенного образа ситуации с образом реальных исполнительных действий.
Функция эта является достаточно сложной, она требует не механического соединения, а качественного проникновения одного в другое и на основе этого построения симультанного, единого для данных условий сенсомоторного образа рабочего пространства.
На его основе затем будет совершенствоваться уже собственно-исполнительная часть действия. Наличие такого единого ориентирующего образа открывает на этом этапе возможность для формирования и совершенствования программы действия, первые попытки построения которой уже наметились на этапе построения образа исполнительных действий.
Задание № 4. Быстрое обучение слепой печати на клавиатуре.
Последовательность выполнения задания:
- Прочитайте методические указания.
- Изучите расположение клавиш на шаблоне
- Выполните последовательно упражнения с 1 по 7.
- Выполните разминку (упражнение 13 и 14)
- Самостоятельно дома выполните остальные упражнения.
- Повторяйте упражнения до тех пор пока не достигните автоматизма в выполнении упражнений.

[1] СИМПЛИФИКАЦИЯ [фр. simplification < лат. simplificare - упрощать] - упрощение, превращение в нечто более доступное для понимания. (http://dic.academic.ru)
[2] Афферентация (от лат. afferens — «приносящий») — постоянный поток нервных импульсов, поступающих в центральную нервную систему от органов чувств, воспринимающих информацию как от раздражителей внешних (экстерорецепция), так и от внутренних органов (интерорецепция). Находится в прямой зависимости от силы раздражителей и насыщенности ими среды, а также от состояния — активности или пассивности — индивида. (http://ru.wikipedia.org)
[3] Синерги́я (греч. συνεργία — сотрудничество, содействие, помощь, соучастие, сообщничество; от греч. σύν — вместе, греч.ἔργον — дело, труд, работа, (воз)действие) — суммирующий эффект взаимодействия двух или более факторов, характеризующийся тем, что их действие существенно превосходит эффект каждого отдельного компонента в виде их простой суммы[1], эмерджентность (http://ru.wikipedia.org)
[4] САККАДЫ - Быстрые движения глаз, скачки из одной точки фиксации в другую.(http://psychology_dictionary.academic.ru)
[5] Инверсия от лат. inversio — переворачивание, перестановка
[6] Перцептивные действия - основные структурные единицы процесса восприятия -, обеспечивающие построение предметного образа. Перцептивные действия, служащие для построения единого перцептивного образа, могут реализоваться с помощью различных наборов перцептивных операций. (http://dic.academic.ru)
[7] Иннервация (от лат. in — в, внутри и нервы) — снабжение органов и тканей нервами, что обеспечивает их связь с центральной нервной системой (http://ru.wikipedia.org)
[8]
|
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 1033; Нарушение авторских прав?; Мы поможем в написании вашей работы!