КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Параллельные порты
|
|
|
|
ЛЕКЦИЯ 7. ПАРАЛЛЕЛЬНЫЕ И ПОСЛЕДОВАТЕЛЬНЫЕ ПОРТЫ
МПС работает с внешними устройствами (ВУ), от ВУ она получает информацию и обработанную информацию передает на ВУ. В качестве ВУ может служить любой объект управления или источник информации (различные кнопки, датчики, микросхемы приемников, синтезаторов частот, дополнительной памяти, исполнительные механизмы, двигатели, реле и т.д.). Все ВУ подключаются к МП с помощью параллельных или последовательных портов.
Параллельные порты позволяют осуществить параллельный обмен информацией между МП и ВУ. С точки зрения ВУ порт представляет собой обычный источник или приемник информации со стандартными цифровыми логическими уровнями (обычно ТТЛ), а с точки зрения МП - это ячейка памяти, в которую можно записывать данные (из МП) или в которой появляется информация (от ВУ). Параллельные порты позволяют согласовывать низкую скорость работы ВУ и высокую скорость работы системной шины МП.
Порты ввода. В зависимости от направления передачи данных параллельные порты называются портами ввода, вывода или портами ввода – вывода (если они двунаправленные). На рисунке 7.1 приведена функциональная схема порта ввода.
В качестве порта ввода обычно используются схемы с третьим состоянием - шинным формирователем (ШФ). Из порта ввода возможно только чтение информации. Выход ШФ подключается к системной шине. Значение сигнала с внешнего вывода порта считывается по сигналу "RD".Чтобы попасть именно на заданное ВУ в составе порта ввода-вывода всегда присутствует дешифратор адреса.
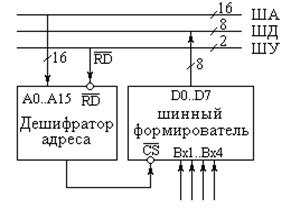
Рис. 7.1. Функциональная схема порта ввода
Порт вывода. Функциональная схема порта вывода приведена на рисунке 7.2.
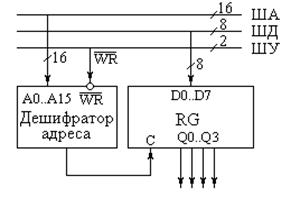
Рис. 7.2. Функциональная схема порта вывода
В качестве порта вывода может быть использован параллельный регистр. В порт вывода возможна только запись. Данные с внутренней шины микроконтроллера записываются в регистр по сигналу "WR". Выходы "Q" регистра могут быть использованы как источники логических уровней для управления ВУ.
Во многих МП и МК для портов выделяется отдельное адресное пространство и, соответственно, отдельные команды. Например, ……
Порты ввода-вывода. Параллельные порты могут быть двунаправленными. В МК, например, параллельные порты являются встроенными и двунаправленными. Типичная схема двунаправленного порта ввода/вывода (одной линии) МК приведена на рис. 7.3.


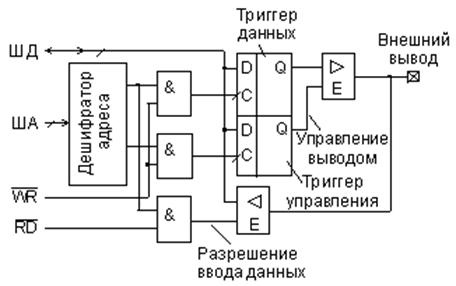
Рис. 7.3. Типовая схема одного вывода двунаправленного порта
ввода - вывода МК.
Дешифратор адреса разрешает работу именно этого порта – разрешение на ввод или вывод. Схема содержит триггер данных и триггер управления. Триггер управления разрешает вывод данных на внешний вывод, если подан управляющий сигнал WR. В современных МК, как правило, обеспечивается индивидуальный доступ к триггерам данных и управления, что позволяет использовать каждую линию независимо в режиме ввода или вывода.
Необходимо обратить особое внимание на то, что при вводе данных считывается значение сигнала, поступающее на внешний вывод, а не содержимое триггера данных. Если к внешнему выводу МК подключены выходы других устройств, то они могут установить свой уровень выходного сигнала, который и будет считан вместо ожидаемого значения триггера данных.
Для МК в качестве параметра приводят число линий ввода -вывода. Линии ввода – вывода объединены в многоразрядные (чаще
8-разрядные) параллельные порты ввода/вывода. В памяти МК каждому порту ввода/вывода соответствует свой адрес регистра данных.
Обращение к регистру данных порта ввода/вывода в некоторых МК производится теми же командами, что и обращение к памяти данных. Во многих МК отдельные разряды портов могут быть опрошены или установлены командами битового процессора.
Каждый порт обычно имеет 3 регистра. Например, если имеем дело с портом В, имеется регистр данных порта (PORTB), регистр направления порта (DDRB) и регистр PINB, с которого считываются сигналы на внешних контактах порта.
При выводе информация на канале фиксируется и сохраняется до ее смены в выходном регистре порта (до следующей команды OUT, адресованной к этому каналу). При вводе же информация не фиксируется.
Параллельный обмен является быстродействующим, однако характеризуется небольшим расстоянием передачи (1 – 2 метра).
Уровни сигналов и нагрузочная способность. Согласование между собой уровней сигналов портов и внешних микросхем не представляет трудностей, так как практически все современные МС по входу и выходу согласованы с TTЛ уровнями. Если же это не так, то для согласования нестандартных уровней с TTЛ уровнями выпускаются специальные МС.
Дело не только в уровнях сигналов согласуемых МС, но и нагрузочной способности. Необходимо знать нагрузочную способность портов и в случае необходимости «умощнять» выход. В качестве примера на рисунке 7.4. показано подключение светодиодного индикатора.
Рис. 7.4. Подключение одиночного светодиодного индикатора.
Транзистор в схеме служит для увеличения тока параллельного порта, при помощи которого МП зажигает и гасит светодиодный индикатор.
8.2. ПОСЛЕДОВАТЕЛЬНЫЕ ИНТЕРФЕЙСЫ (ПОРТЫ).
Последовательная связь. В настоящее время наиболее распространенным способом обмена данными в МПС является последовательная. Последовательно связываются между собой микропроцессоры (микроконтроллеры); МП и ПЭВМ; МП и интеллектуальные датчики; МП и другие МС на плате.

Рис. 7.5. Последовательная связь между передатчиком и приемником
В случае последовательной связи байт данных передается по единственному проводу бит за битом (рис. 7.5). Очевидное преимущество последовательной передачи данных состоит в том, что она требует небольшого количества линий связи.
Последовательная связь может быть однонаправленная (симплексная), двунаправленная с разделением во времени (полудуплексная) и двунаправленная (дуплексная).
Существует 2 типа последовательной связи: асинхронная и синхронная. Если передача данных нерегулярная, то осуществляется асинхронный обмен. Если обмен осуществляется большими массивами, то используется синхронная передача. Кадр асинхронного обмена представлен на рис. 7.6.
Рис 7.6. Кадр асинхронной передачи
В этом режиме на линии поддерживается уровень «1» пока не передается информация. При начале передачи на линию поступает стартовый бит, равный «0», затем от 5 до 8 информационных бит, за ними может следовать (или не следовать) бит паритета. Передача символа завершается одним или двумя стоповыми битами, равными «1». После этого снова может передаваться стартовый бит и следующий символ, или же, при отсутствии информации, на линии устанавливается уровень «1». Каждый раз при передаче байта происходит ресинхронизация.
Асинхронный режим используется только в сравнительно медленно работающих устройствах, так как кроме полезной информации передаются служебные биты, что снижает скорость обмена информацией.
При синхронной передаче должен быть отдельный канал синхронизации. Выборка данных на входе приемника и изменение данных на выходе передатчика синхронизируется от одного и того же тактового сигнала (рисунок 7.7). Каждый информационный кадр стробируется синхросигналом. Скорость передачи в синхронном режиме выше из-за отсутствия служебных бит.
Скорость передачи по последовательному каналу измеряется в битах в секунду (в бодах) и может доходить до десятков Мбит/с.
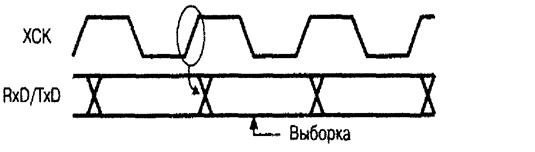
Рис. 7.7. Синхронная передача данных
Контроллеры последовательной связи. Для преобразования параллельного цифрового кода в последовательный используются специальные схемы (контроллеры), построенные на базе сдвиговых регистров, тактируемых импульсными последовательностями определенной частоты. Каждым тактовым импульсом параллельный цифровой код сдвигается на одну позицию, которая поступает на линию связи. Таким образом, параллельный цифровой код превращается в последовательность импульсов стандартных уровней.
Кроме преобразования кодов контроллеры позволяют:
– изменять число информационных бит в кадре,
– изменять скорость передачи информации,
– контролировать ошибки и т.д.
В качестве примера можно привести контроллеры последовательной связи USART – универсальный синхронно-асинхронный приемо-передатчик. Он встраивается в МК (в МПС может быть выполнен в виде отдельной МС) и выполняет все необходимые процедуры преобразования кодов. Может работать в синхронном и асинхронном режимах. Обеспечивает дуплексный режим связи, детектирование стартовых посылок, ошибок четности и формата. Единица обмена - символ, буква, цифра, любой другой знак. Он кодируется последовательностью из 5-8 бит. Максимальная скорость обмена информацией в асинхронном режиме - 9,6 кбит/с, в синхронном - 56 кбит/с.
Последовательная связь с ПЭВМ. Частоинформация должна передаваться из МК в ПЭВМ, например, в системах сбора информации. Первым и наиболее удачным среди последовательных интерфейсов оказался RS-232, до настоящего времени являющийся неотъемлемой частью любого РС - совместимого компьютера в виде СОМ - порта.
Интерфейс RS-232C разработан в 1969 году и до сих пор активно используется для синхронной и асинхронной последовательной связи при двухточечном соединении, в полудуплексном и дуплексном режимах обмена. При передаче используются уровни сигналов ±12 В. Скорость передачи данных составляет от 50 до 115 кбод на расстояние до 15 м.
Различными фирмами выпускается широкая номенклатура микросхем, предназначенных для преобразования ТТЛ/КМОП - уровней в уровни RS-232 и обратно. Большинство из них имеют встроенный преобразователь напряжения и работают от одного источника питания +5 В. Различные типы микросхем могут отличаться нагрузочной способностью, величиной емкостной нагрузки, типом корпуса.
RS-232 имеют низкую защищенность от синфазной помехи. Существенными преимуществами в этом плане обладают двухточечный интерфейс RS-422 и его магистральный аналог RS-485, в которых сигнал передается в дифференциальном виде. Но эти интерфейсы отсутствуют в стандартной комплектации компьютеров и микроконтроллеров. Поэтому применение RS-422 и RS-485 приводит к необходимости использования дополнительных устройств и программного драйвера.
В настоящее время последовательная связь с ПЭВМ может осуществляться через интерфейс USB с использованием соответствующих драйверов. В современных программаторах последовательный порт USB используется как для программирования, так и для питания.
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 2545; Нарушение авторских прав?; Мы поможем в написании вашей работы!