КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Назначение. Принцип работы
|
|
|
|
Трехпозиционные регуляторы
Недостатки двухпозиционного регулирования
Двухпозиционные регуляторы практически неприменимы для систем с существенным транспортным запаздыванием (τd > 0,2Т) и для объектов без самовыравнивания, так как регулируемая величина далеко выходит за необходимые пределы регулирования. В этом случае применяют регуляторы с ПИ или ПИД законом регулирования.
Трехпозиционные регуляторы обеспечивают хорошее качество регулирования для инерционных объектов с малым запаздыванием. Трехпозиционные регуляторы используются для управления переключательными элементами - дискретными исполнительными устройствами:
- электромеханическими реле,
- контакторами,
- транзисторными ключами,
- симисторными или тиристорными устройствами,
- твердотельными реле и др.
Трехпозиционныерегуляторы используются для систем управления уровнем различных веществ, для систем управления нагреванием-охлаждением различных тепловых процессов, холодильных установок, регулирования микроклимата подогревателем и вентилятором, для систем распределения и смешивания различных потоков веществ с помощью трехходовых клапанов, кранов,смесителей, реверсивных электродвигателей, сервоприводов и др. Трехпозиционный регулятор включает при помощи переключательных элементов электродвигатель исполнительного механизма на правое вращение (например, открытие регулирующего органа), остановку или левое вращение (соответственно - закрытие регулирующего органа), три позиции (отсюда и название регулятора - трехпозиционный) - электродвигатель включен на правое вращение, полностью остановлен или включен на левое вращение.
Принцип работы трехпозиционного регулятора рассмотрим на емкости с водой, с постоянно работающим насосом подкачки (рис.10).
- Для измерения уровня в емкости установлен датчик уровня. На линии подкачки после насосаустановлен регулирующий клапан с электроприводом. При заданном уровне SP - «норма» - клапан находится в некотором промежуточном положении.
- При уменьшении уровня ниже уставки SPL «нижний уровень» включится электродвигатель сигналом Б (больше), открывая клапан.
- При восстановлении уровня электродвигатель клапана остановится (снятием сигнала Б) - уровень будет находиться в зоне SP «норма».
- Если уровень повысится выше уставки SPH «верхний уровень», то клапан закроется,отключится электродвигатель сигналом М (меньше).
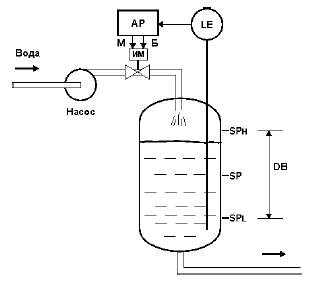
Рис. 10 Схема управления регулятором уровня в емкости
АР – трехпозиционный регулятор, ИМ – исполнительный механизм, LE – датчик уровня, SP – заданное значение, SPH – заданное значение верхнего уровня, SPL – заданное значение нижнего уровня, DB –зона нечувствительности регулятора, М – сигнал регулятора «меньше», Б – сигнал регулятора «больше».
Регулятор работает по принципу SPL «нижний уровень» - SP «норма» (средний уровень) - SPH «верхний уровень».
Величина ширины зоны нечувствительности (мертвой зоны) DB (зона «норма») - является программируемым параметром настройки трехпозиционного регулятора (рис. 10). Увеличение ширины зоны нечувствительности DB уменьшается точность регулирования и может привести к тому, что в процессе работы сисиемы регулирующий орган будет без остановки перемещатьсяот одного крайнего положения к другому, т.е., не будет отличаться от двухпозиционного регулятора. К такому же результату приводит значительное увеличение скорости регулирующего органа.
Диапазон нечувствительности (мертвая зона) DB устанавливается с центром в заданной точке. Варианты представления зоны нечувствительности (DB):
- полное значение зоны нечувствительности (см. рис. 10),
- половинное значение зоны нечувствительности (см. рис.11).
Структурная схема трехпозиционной системы регулирования приведена на рис. 11.
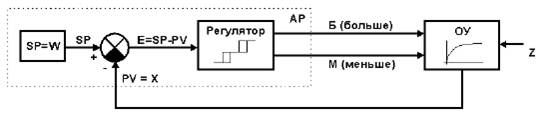
Рис. 11 Структурная схема трехпозиционной системы регулирования
где: АР – трехпозиционный регулятор, ОУ – обьект управления, SP – узел формирования заданной точки (задания), Е – рассогласование регулятора, PV=X – регулируемая величина, сигналы Б (больше) и М (меньше) – управляющие воздействия, Z – возмущающее воздействие. Для предотвращения «дребезга» управляющего выходного устройства (например, реле) и исполнительного механизма вблизи точки его включения (слишком частого включения), предусматривается гистерезис Н.
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 735; Нарушение авторских прав?; Мы поможем в написании вашей работы!