КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Рекомендации по выбору закона регулирования и типа регулятора
|
|
|
|
Определение динамических характеристик объекта регулирования
Для определения динамических характеристик объекта регулирования - коэффициента усиления (передачи) объекта К, постоянной времени обьекта Т и запаздывания τd на практике чаще пользуются экспериментальными методами, поскольку зависимость между входной и выходной величиной (переходная характеристика или кривая разгона) легче получить именно таким способом.
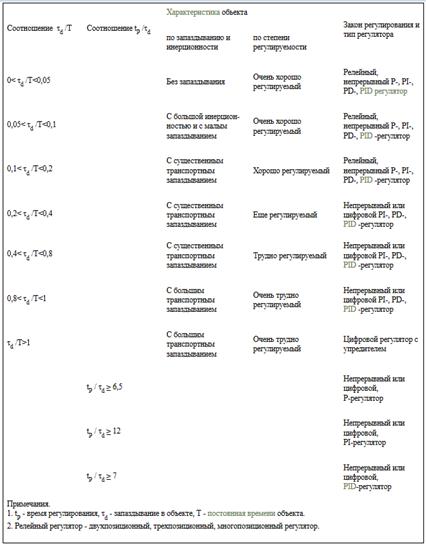
Минимально возможное время регулирования tР для различных законов регулирования и типов регуляторов при оптимальной их настройке определяется таблицей 1. Теоретически, в системе с запаздыванием, минимальное время регулирования tPMIN = 2 τd. В таблице 1 приведены рекомендации по выбору закона регулирования и типа регулятора исходя из величины отношения запаздывания τd к постоянной времени объекта Т.
Если τd /Т < 0,2, то можно выбрать релейный, непрерывный или цифровой регуляторы.
Если 0,2 < τd /Т < 1, то должен быть выбран непрерывный или цифровой, PI-, PD-, PID-регулятор.
Если τd /Т > 1, то выбирают специальный цифровой регулятор с упредителем, который компенсирует запаздывание в контуре управления. Однако этот же регулятор рекомендуется применять и при меньших отношениях τd /Т.
Таблица 1 Выбор закона регулирования и типа регулятора по отношению τd /Т и tP /τd
Для каждого объекта управления необходимо применять регуляторы с соответствующим алгоритмом и законом регулирования. Это позволяет существенно снизить потери при функционировании объекта (расход энергии, потери продукции и пр.
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 527; Нарушение авторских прав?; Мы поможем в написании вашей работы!