КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Измеряемые и регулируемые величины
|
|
|
|
ТЕХНИЧЕСКИЕ СРЕДСТВА ПОЛУЧЕНИЯ ИНФОРМАЦИИ О СОСТОЯНИИ ОБЪЕКТА УПРАВЛЕНИЯ
Устройства получения информации о состоянии процесса
Устройства получения информации предназначены для сбора и преобразования информации без изменения ее содержания о контролируемых и управляемых параметрах технологических процессов. Входом устройств являются естественные или унифицированные сигналы, выходом – соответствующие значения унифицированных сигналов.
Унифицированным сигналом называют сигнал дистанционной передачи информации с унифицированными параметрами, обеспечивающий интерфейс между блоками, приборами и установками.
|
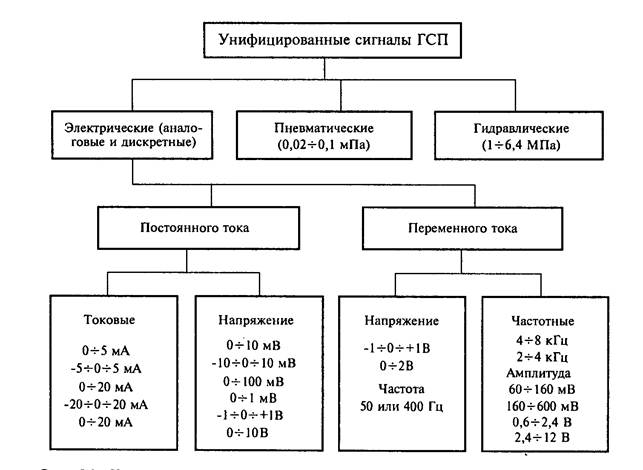
| Классификация основных унифицированных информационных сигналов ГСП |
К устройствам для получения информации о состоянии процесса относят чувствительные элементы или собственно датчики, измерительные преобразователи и нормирующие преобразователи. К этой же группе устройств относятся релейные (позиционные) преобразователи – контактные, индукционные, пневматические, оптические, радиационные и преобразователи, реагирующие на определенные состояния среды, положения изделий и выдающие дискретные сигналы, а также устройства формирования алфавитно-цифровой информации.
Датчики физических величин воспринимают контролируемый параметр и преобразуют его в величину, удобную для передачи по каналам связи или дальнейшего преобразования. Стоимость датчиков в АСУ ТП составляет до 40% стоимости всего оборудования, что свидетельствует о большом удельном весе этой группы устройств комплекса технических средств.
Измерительные преобразователи переводят выходной сигнал датчиков в выходную физическую величину: перемещение, усилие, сопротивление, напряжение, ток, частоту. Измерительные преобразователи и чувствительные элементы часто представляют собой единое изделие и называются первичными измерительными преобразователями, если на их выходе сигнал представлен в естественном виде (не унифицированном).
Нормирующие преобразователи переводят выходной сигнал измерительных преобразователей с естественным выходом сигналов в унифицированный сигнал. Если на выходе измерительного преобразователя, чувствительный элемент которого непосредственно воспринимает изменения контролируемого параметра, выдается пневматический или электрический сигнал, то нормирующий преобразователь обычно представляет собой отдельное самостоятельное устройство. Если же чувствительный элемент выдает сигнал в виде усилия, перемещения или какой-нибудь другой физической величины, по своей природе отличной от электрической или пневматической, то измерительный и нормирующий преобразователи объединяются конструктивно в один прибор.

Основные характеристики устройств для получения информации
Основными характеристиками устройств являются: входная величина, воспринимаемая и преобразуемая датчиком; выходная величина, используемая для передачи информации; статическая характеристика датчика; динамическая характеристика датчика; порог чувствительности; основная и дополнительная погрешности.
Все входные величины датчиков подразделяются на два класса:
¾ величины, характеризующие протекание процессов (ток, напряжение, перемещение, расход, сопротивление, упругость, масса и т.п.);
¾ величины, характеризующие свойства и состав веществ (концентрация, температура, влажность и т.п.).
Под статической характеристикой датчика понимают закон изменения выходной величины в зависимости от входной. Наиболее распространены линейный закон, квадратичный, логарифмический и обратнологарифмический. Наиболее приемлемой статической характеристикой для большинства датчиков является линейная характеристика. Для линеаризации датчиков, статическая характеристика которых может быть представлена аналитическими (гладкими) нелинейностями, используются усилители-линеаризаторы.
Для наиболее распространенных типов датчиков статические характеристики стандартизируются с указанием допустимых отклонений статических характеристик от номинальных значений.
Динамическая характеристика датчика определяет поведение датчика при изменениях входной величины и определяется внутренней структурой датчика и его элементов. Динамические свойства датчиков задаются передаточными функциями, дифференциальными уравнениями, переходными, амплитудно-фазовыми, амплитудно-частотными, фазовыми и другими характеристиками. Среди динамических характеристик рассматриваются минимальное время изменения, максимальная скорость изменения входной величины, интегральная – задержка получения входной величины; зависимость погрешности от скорости изменения входной величины; дифференциальная – влияние скорости изменения входной величины на выходную величину.
Порог чувствительности датчика – минимальное изменение входной величины, вызывающее изменение выходного сигнала.
Основная погрешность датчика – максимальная разность между получаемой в нормальных эксплуатационных условиях величиной выходного сигнала и его номинальным значением, определяемым по статической характеристике для данной входной величины.
Измерительные (нормирующие) преобразователи
Измерительный преобразователь является средством измерения, служащим для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и (или) хранения, но не предназначенной для непосредственного восприятия наблюдателем.
Принципы построения измерительных преобразователей могут быть рассмотрены со следующих точек зрения:
• структурная организация измерительных преобразователей;
• характер преобразования сигнала на входе преобразователя;
• тип интерфейса для включения измерительного преобразователя в систему управления;
• технология изготовления функциональных элементов преобразователей и их конструктивное исполнение.
С точки зрения структурной организации измерительные преобразователи могут быть построены в виде каскадного или последовательного, дифференциального, логометрического и компенсационного соединения.
Каскадное или последовательное соединение изображено на рис. 4.1, а, где Wg1,…,Wgn – передаточные функции звеньев измерительного преобразователя. Примером каскадного соединения звеньев может служить манометрический термометр (рис. 4.1, б), состоящий из баллона 1, капилляра 2, сильфона 3 и реостатного датчика 4.
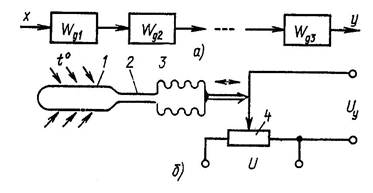
Рис. 4.1 Каскадное соединение звеньев канала измерения
Дифференциальное соединение звеньев. Структурная схема датчика дифференциального типа приведена на рис. 4.2, а. Характерная особенность дифференциальных датчиков – наличие двух однотипных звеньев, выходные сигналы которых вычитаются. Входные сигналы x1, x2 могут быть либо оба контролируемыми величинами, либо один - контролируемая величина, а другой – постоянная (в том числе и нулевая). Примером дифференциального датчика является дифференциальный трансформаторный датчик (рис. 4.2, б).
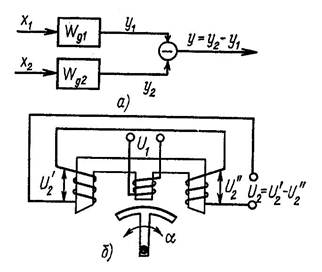
Рис. 4.2 Дифференциальное соединение звеньев канала измерения
Основные достоинства дифференциальных датчиков:
• снижение дополнительных погрешностей;
• возможность увеличения чувствительности датчика и исключения постоянной составляющей в выходном сигнале;
• возможность линеаризации статической характеристики датчика в целом при нелинейных статических характеристиках звеньев Wg1, Wg2.
Логометрическое соединение звеньев. В датчиках этого типа выходная величина пропорциональна отношению двух величин, одна из которых (или обе) является функцией входной величины. Наиболее ответственной и трудно реали-зуемой частью логометрических датчиков является делительное звено. На рис. 4.3 а, б изображены два варианта делителей. Во второй схеме (рис. 4.3, б) в цепь y1, y2включены логарифмирующие звенья, а деление заменено вычитанием аналогично дифференциальной схеме.
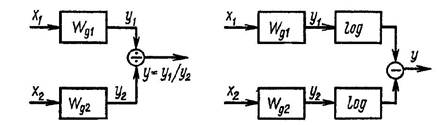
Рис. 4.3 Логометрическое соединение звеньев канала измерения
Компенсационное соединение звеньев. Для осуществления непрерывной компенсации преобразователь (рис. 4.4) содержит отрицательную обратную связь с передаточной функцией Wg. При k>>1 y≈x Wg-1. Устройства (звенья) компенсационного преобразователя, входящие в замкнутый контур, следует выбирать с учетом обеспечения динамической устойчивости. Компенсационные датчики обладают всеми преимуществами замкнутых автоматических систем.
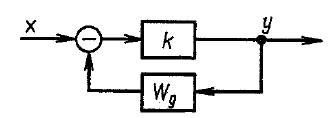
Рис. 4.4 Компенсационное соединение звеньев канала измерения
В зависимости от характера преобразования сигнала на входе измерительные преобразователи разделяются на три группы:
1. Преобразователи, имеющие на входе и выходе одинаковые физические величины, например делители напряжения, измерительные трансформаторы.
2. Преобразователи, имеющие на входе и выходе различные физические величины. К ним относятся измерительные преобразователи неэлектрических величин – давления, температуры, расхода, влажности и т.п.
3. Преобразователи структуры сигнала ¾ аналого-цифровые и цифро-аналоговые преобразователи, преобразователи кода, преобразователи напряжения в частоту и т.п.
Приведем классификацию измерительных преобразователей по виду вырабатываемой измерительной информации (рис.4.5).
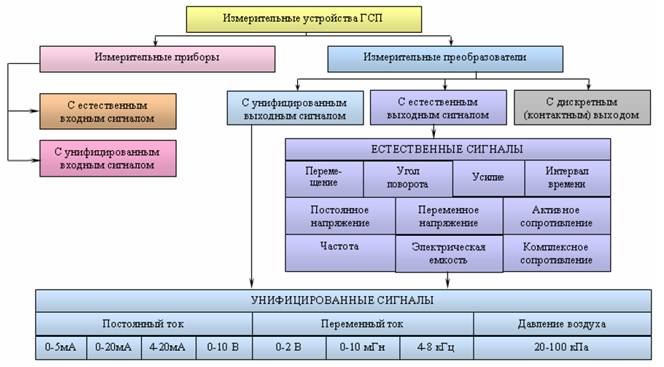
|
| Рис. 4.5 Классификация измерительных преобразователей по виду вырабатываемой измерительной информации |
В зависимости от вида входного сигнала (постоянный или переменный ток и напряжение, изменение сопротивления или индуктивности) измерительные преобразователи строятся по различным принципам измерения: по принципам выпрямителя, фазометрического преобразователя, статической автокомпенсации, емкостному принципу, принципу прохождения стрелки через «нуль», с использованием генератора с кварцевой стабилизацией частоты и др.
Соединение измерительных преобразователей с устройствами комплекса технических средств АСУ ТП осуществляется посредством двух-, четырех- и реже трехпроводных линий связи. Введение международных стандартов на сигнал связи постоянного тока 4-20 мА позволило перейти на двухпроводную связь, обеспечивающую минимальный расход проводов для линий связи (путем совмещения цепи питания с цепью передачи сигналов), возможность контроля обрыва линий связи по току смещения, искробезопасность, монтаж непосредственно в рабочей зоне.
В ряде систем контроля и регулирования при автоматизации территориально распределенных объектов (с длиной линий связи более 3 км) с большим числом датчиков, а также при монтаже вблизи УВМ система передачи данных с помощью сигналов по двухпроводной схеме становится дорогостоящей и заменяется на схему с параллельным соединением. При этом используются групповой общий источник питания и групповой приборный усилитель маломощных сигналов напряжения (до 100 мВ) до унифицированных аналоговых сигналов напряжения.
Элементная база современных аналоговых измерительных преобразователей использует два типа технологии производства функциональных элементов: полупроводниковой и технологии изготовления интегральных микросхем. Схемотехнические решения преобразователей на такой элементной базе обеспечивают:
• гальваническую развязку входных электрических цепей от выходных;
• помехозащищенность входных контуров;
• независимость значения выходного тока от сопротивления нагрузки измерительного преобразователя;
• сдвиг нуля выходного сигнала (выход 4-20 мА) при проведении диагностики линии связи с датчиками.
Конструктивное исполнение измерительных преобразователей аналоговых систем контроля и регулирования обычно отвечает общему принципу построения того агрегатного комплекса приборов, в который они входят. В зависимости от числа точек измерения монтаж измерительных преобразователей может быть индивидуальным (моноблочное исполнение) и групповым (мультиблочное исполнение). В первом случае преобразователи выполняются в виде блоков или модулей в закрытых корпусах. При более перспективном групповом монтаже модули стандартных габаритов размещаются в шкафах вместе с другими функциональными устройствами локальной автоматики.
Традиционные приборы с аналоговым выходным сигналом уже не отвечают новым требованиям, предъявляемым к системам автоматизации, учета и контроля технологических процессов. Современное развитие технологий позволило встроить микропроцессор в приборы самого нижнего уровня автоматизации - датчики и исполнительные механизмы, превратив их в интеллектуальные. При этом появляется возможность использовать цифровые датчики с микропроцессорными измерительными преобразователями. Для каждого типа датчика подбирается определенный чип без перестройки схемы самого преобразователя. В еще более современных системах распределенного управления функция каждого входного модуля преобразователя определяется микроЭВМ. Функция и параметры настройки каждого модуля заложены в перепрограммируемое запоминающее устройство (ППЗУ) микроЭВМ. Перепрограммируя ППЗУ, можно настроить измерительный преобразователь на работу с различными датчиками.
Интеллектуальный датчик содержит в своем составе, как правило, не только микропроцессор, но и устройство двунаправленной цифровой коммуникации. Двунаправленная коммуникация является важнейшим преимуществом приборов нового поколения. Теперь настройку и управление датчиком можно осуществлять из одного места, например из диспетчерского пункта.
Протокол HART – широко известный промышленный стандарт для усовершенствования токовой петли 4-20 мА до возможности цифровой коммуникации. Использование этой технологии быстро растет, так как все крупнейшие производители средств автоматизации применяют в своих приборах HART. Протокол позволяет передавать одновременно аналоговый и цифровой сигнал по одной и той же паре проводов. При этом сохраняется полная совместимость и надежность существующих аналоговых линий 4-20 мА.
Существует два режима работы датчиков, поддерживающих обмен данными по HART-протоколу.
Режим передачи цифровой информации одновременно с аналоговым сигналом. Обычно в этом режиме датчик работает в аналоговых АСУ ТП, а обмен по HART-протоколу осуществляется посредством недорогого портативного контроллера - HART-коммуникатора. При этом можно удаленно осуществлять полную настройку и конфигурирование датчика.
В многоточечном режиме датчик передает и получает информацию только в цифровом виде. Аналоговый выход автоматически фиксируется на минимальном значении 4 мА (только для питания устройства) и не содержит информации об измеряемой величине. Информация о переменных процесса считывается по HART-протоколу.
К одной паре проводов может быть подключено до 15 датчиков. Все приборы в многоточечном режиме имеют свой уникальный адрес от 1 до 15. и обращение к каждому идет по соответствующему адресу. Коммуникатор или система управления определяет все датчики, подключенные к линии, и может работать с любым из них.
Замена традиционных аналоговых датчиков на интеллектуальные с протоколом HART предоставляет пользователю дополнительные функциональные и сервисные возможности. Цифровая связь позволяет производить удаленную перенастройку диапазона измерений или полуавтоматическую калибровку без вывода прибора из эксплуатации, осуществлять коррекцию нуля и считывание индивидуальных параметров прибора. Непрерывная самодиагностика обеспечивает высокую надежность функционирования систем. При ухудшении технических характеристик датчик мгновенно выдает сигнал о неисправности, что приводит к повышению эффективности работы персонала и сокращению простоев.
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 3315; Нарушение авторских прав?; Мы поможем в написании вашей работы!