КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Аппаратно-программные средства распределенных са и у
|
|
|
|
Развитие АСУ ТП на современном этапе связано с широким использованием для управления микропроцессоров и микроЭВМ, стоимость которых с каждым годом становится все более низкой по сравнению с общими затратами на создание систем управления. До появления микропроцессоров эволюция систем управления технологическими процессами сопровождалась увеличением степени централизации. Однако возможности централизованных систем теперь оказываются ограниченными и не отвечают современным требованиям.
Наиболее перспективным направлением децентрализации АСУ ТП является автоматизированное управление процессами с распределенной архитектурой, базирующееся на функционально-целевой и топологической децентрализации объекта управления.
Функционально-целевая децентрализация – это разделение сложного процесса или системы на меньшие части – подпроцессы или подсистемы по функциональному признаку (например, части технологического процесса, режимы работы агрегатов и т.д.), имеющие самостоятельные цели функционирования.
Топологическая децентрализация означает возможность территориального (пространственного) разделения процесса на функционально-целевые подпроцес-сы. При оптимальной топологической децентрализации число подсистем распределенной АСУ ТП выбирается так, чтобы минимизировать суммарную длину линий связи, образующих вместе с локальными подсистемами управления сетевую структуру.
Технической основой современных распределенных систем управления являются микропроцессоры и микропроцессорные системы.
Микропроцессорной системой будем называть любую вычислительную, информационно-управляющую или управляющую систему, устройством обработки информации которой является микропроцессор.
Так как распределенная система содержит минимум две функционально-связанные подсистемы, то в техническом плане образуется либо многомашинная, либо многопроцессорная система.
Многомашинная система – это вычислительная система, содержащая более одной машины. Операционная система не является общей, и для каждой машины операционная система своя. Связь между машинами чисто аппаратная.
Многопроцессорная система – это система, состоящая из двух (или более) процессоров, которые имеют доступ к общей центральной памяти; имеют общий доступ по крайней мере к части устройств ввода и вывода; управляются одной общей операционной системой. Использование микропроцессоров приводит к мультимикропроцессорным системам.
Так как в распределенных АСУ ТП подсистемы функционально связаны и их совместная работа подчинена общей цели, то между машинами (мини- и мик-роЭВМ) или процессорами в многомашинной или мультимикропроцессорной системах возникает помимо аппаратной связи программный обмен, обеспечивающий как решение функциональных задач АСУ ТП, так и организацию самого программного обмена. Программный обмен между управляющими ЭВМ или микропроцессорными системами локальных подсистем распределенной АСУ ТП осуществляется при помощи каналов связи. С точки зрения обработки данных распределенная АСУ ТП представляет собой объединение при помощи каналов и устройств связи разнообразных мини- и микроЭВМ, микропроцессорных систем («узлов-абонентов»), которое принято называть локальной вычислительной сетью.
Определим локальную вычислительную сеть как многомашинную систему, работающую в единой операционной среде, являющуюся расширением операционных систем ЭВМ – узлов локальной вычислительной сети. Если локальная вычислительная сеть используется для технической реализации систем управления, то такую сеть будем называть локальной управляющей вычислительной сетью.
Топология распределенных АСУ ТП.
В распределенных АСУ ТП приняты в основном три топологические структуры взаимодействия подсистем: звездообразная (радиальная) (рис. 9.1); кольцевая (петлевая) (рис. 9.2); шинная (магистральная) (рис. 9.3) или их комбинации. Организация связи с датчиками и исполнительными устройствами носит индивидуальный и преимущественно радиальный характер.
|
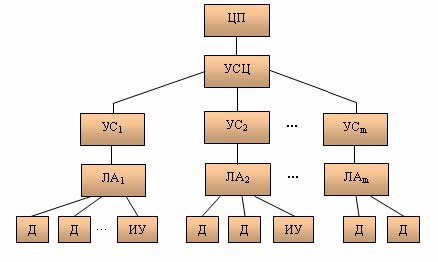
| Рис. 9.1 Радиальная структура распределенной АСУ ТП |
Особенности радиальной структуры взаимодействия подсистем:
1. Существуют отдельные, не связанные между собой линии, объединяющие центральную подсистему ЦП с локальными системами автоматики ЛА i.
2. Технически просто реализуются устройства сопряжения УС1 – УСm локальной автоматики. Центральное устройство связи УСЦ представляет собой набор модулей типа УС i по числу линий либо достаточно сложное устройство мультиплексирования каналов передачи информации.
3. Обеспечиваются максимальные скорости обмена по отдельным линиям при достаточно высокой производительности вычислительных устройств на уровне центральной подсистемы.
4. Надежность подсистемы связи в значительной степени зависит от надежности и живучести технических средств центральной подсистемы. Выход из строя центральной подсистемы практически разрушает под-систему обмена, так как все потоки информации замыкаются через верхний уровень.
Распределенная система с радиальной структурой является двухуровневой системой, где на нижнем уровне в подсистемах реализуются необходимые функции контроля, регулирования, управления, а на втором – в центральной подсистеме координирующая микроЭВМ (или мини-ЭВМ) кроме координации работы микроЭВМ – сателлитов осуществляет оптимизацию задач управления технологическим объектом управления, распределение энергии, управляет технологическим процессом в целом, вычисляет технико-экономические показатели и т.п.
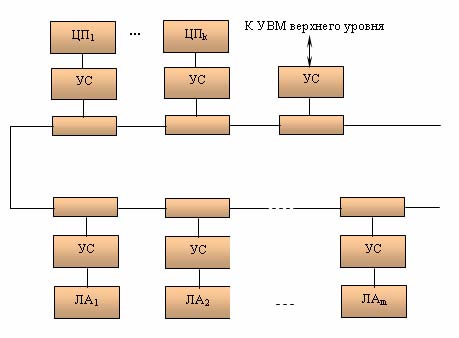
На рис. 9.2, 9.3 изображены кольцевая и шинная топологии взаимодействия уровней.
|
| Рис. 9.2 Магистральная структура распределенной АСУ ТП |
Эти структуры имеют ряд достоинств по сравнению с радиальной:
1. Работоспособность подсистемы связи, включающей в себя канал и устройства связи, не зависит от исправности технических средств на уровнях автоматизации.
2. Имеются возможности подключения дополнительных устройств и контроля всей подсистемы с помощью специальных средств.
3. Необходимы значительно меньшие затраты кабельной продукции.
За счет обмена информацией между локальными системами автоматики ЛА i через канал связи и устройство сопряжения («каждый с каждым») появляется дополнительная возможность динамического перераспределения функций координации совместной работы подсистем локальной автоматики по нижним уровням в случае выхода из строя центральной подсистемы.
Шинная (в меньшей степени кольцевая) структура обеспечивает широковещательный режим обмена между подсистемами, что является важным преимуществом при реализации групповых команд управления. Вместе с тем шинная и кольцевая архитектура предъявляет уже значительно более высокие требования к «интеллекту» устройств сопряжения, а следовательно, повышенные единовременные затраты на реализацию базовой сети.
|
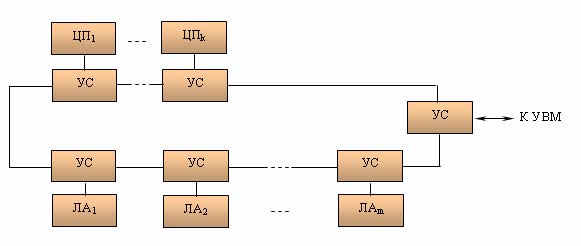
| Рис. 9.3 Кольцевая структура распределенной АСУ ТП |
Сравнивая кольцевую и шинную топологии подсистемы связи, необходимо отметить, что организация кольцевой структуры менее дорогостоящая и требует более дешевых средств связи, чем шинная. Однако надежность всей подсистемы с кольцевой системой связи определяется надежностью каждого устройства сопряжения и каждого отрезка линий связи. Работоспособность физического канала передачи для шинной архитектуры с трансформаторной развязкой не зависит от исправности устройств сопряжения, однако, как и для кольца, выход из строя любого устройства сопряжения в наихудшем случае приводит к полностью автономной работе отказавшего узла подсистемы, т.е. к потере функции управления от уровня центральной подсистемы автоматикой отказавшего узла.
Явным методом повышения живучести всей системы автоматики в случае отказа устройств согласования в подсистеме связи является дублирование устройств согласования в узлах подсистемы. В кольцевой структуре такой подход подразумевается при организации двойных колец и обходных путей. Если надежность непрерывного физического канала для нижней топологии не вызывает сомнений, то возможно дублирование только устройств сопряжения без применения резервного магистрального кабеля.
Более дешевым способом повышения надежности подсистемы связи является использование комбинированных структур, сочетающих в себе достоинства радиальных и кольцевых (магистральных) топологий. Для кольца число радиальных связей может быть ограничено двумя-тремя линиями.
В современных АСУ ТП магистрально-модульный принцип построения технического обеспечения нашел преимущественное распространение.
|
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 1771; Нарушение авторских прав?; Мы поможем в написании вашей работы!