КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Цифровые средства обработки информации в саиу. Информационно-управляющие вычислительные комплексы в АСУ ТП
|
|
|
|
ТЕХНИЧЕСКИЕ СРЕДСТВА ОБРАБОТКИ, ХРАНЕНИЯ ИНФОРМАЦИИ И ВЫРАБОТКИ КОМАНДНЫХ ВОЗДЕЙСТВИЙ.
К группе устройств обработки, хранения информации и выработки команд управления, образующих центральную часть ГСП, относятся анализаторы сигналов, вторичные приборы, функциональные преобразователи, устройства памяти, логические устройства, автоматические регуляторы, задатчики, программные задатчики, а также информационно-управляющие вычислительные комплексы на основе микро- и мини-ЭВМ.
Особое место – в связи с возрастающим внедрением распределенных АСУ ТП – занимают типовые микропроцессорные средства контроля, регулирования и управления, ориентированные на класс объектов, а не на отдельные конкретные технологические процессы.
Развитие типовых микропроцессорных средств идет в двух направлениях.
В соответствии с первым направлением функции контроля, регулирования и управления (нижний уровень распределенных многоуровневых АСУ ТП и локальные системы автоматики) с числом каналов контроля, регулирования и управления от 8 до 256 сосредоточиваются в одной типовой микропроцессорной установке (станции), обладающей необходимой функциональной полнотой, автономностью, конструктивной законченностью.
По второму направлению функции управления нижнего уровня АСУ ТП распределяются между специализированными микропроцессорными устройствами (контроллерами).
Автоматические регуляторы
Несмотря на широкое использование управляющих вычислительных машин, микропроцессорных средств контроля и управления, автоматические регуляторы являются широко распространенными средствами автоматизации в составе локальных систем контроля и регулирования с числом контуров регулирования от 1 до 8-16 подсистем нижнего уровня иерархии управления в распределенных АСУ ТП и системах с супервизорным управлением (см. ГОСТ 21693 – 76).
Супервизорное управление состоит в следующем. По данным, поступающим от датчиков локальных подсистем через устройство связи с объектом, управляющая вычислительная машина вырабатывает значение уставок в виде сигналов, поступающих непосредственно на входы систем автоматического регулирования. Основная задача супервизорного управления – автоматическое поддержание процесса вблизи оптимальной рабочей точки. Кроме того, супервизорное управление позволяет оператору-технологу использовать плохо формализуемую информацию о ходе технологического процесса, вводя через управляющую вычислительную машину коррекцию уставок, параметров алгоритмов регулирования в локальные контуры.
Главная функция регулятора – формирование сигнала рассогласования между регулируемой величиной и ее заданным значением (уставкой) и динамическое преобразование сигнала рассогласования по типовым алгоритмам (законам) регулирования. Управляющий сигнал с выхода регулятора поступает непосредственно на вход исполнительного устройства автоматической системы.
Однако к современным автоматическим регуляторам предъявляется ряд дополнительных эксплуатационных требований, основными из которых являются:
• безударный переход (т.е. без дополнительных переходных процессов в цепях) с режима ручного управления на автоматический и обратно;
• в режиме автоматического управления безударный переход с внешнего источника сигнала задания на внутренний (необходимый, например, в супервизорном управлении);
• ограничение выходного аналогового сигнала по верхнему и нижнему уровням и сигнализации предельных значений этих уровней;
• гальваническое разделение входных и выходных цепей;
• связь с управляющей вычислительной машиной верхнего уровня иерархии управления;
• аналоговая и дискретная автоподстройка динамических параметров регулятора, необходимая для построения адаптивных систем управления.
Автоматические регуляторы электрической ветви в зависимости от вида электрического сигнала разделяются на аналоговые, дискретные и гибридные (аналого-дискретные). В свою очередь, дискретные регуляторы могут быть импульсными и цифровыми. В аналоговых регуляторах информационный сигнал непрерывен на всем тракте формирования сигнала регулирования. В дискретных регуляторах в одной или нескольких точках тракта формирования регулирующего сигнала происходит импульсная модуляция сигнала либо по амплитуде, либо по длительности (ширине) импульсов, либо по частоте импульсов; модуляция по уровню в релейных регуляторах и модуляция по уровню и амплитуде в цифровых регуляторах. В гибридных регуляторах информационные сигналы имеют как аналоговую, так и дискретную природу в различных точках тракта формирования регулирующего сигнала.
Структурные схемы автоматических регуляторов – аналоговых и дискретных – с типовыми алгоритмами регулирования могут быть получены на основе известных в теории автоматического регулирования методов коррекции, когда желаемые динамические характеристики (алгоритмы) достигаются с помощью последовательных и параллельных корректирующих цепей (активных и пассивных) и обратных связей. В ряде случаев исполнительные механизмы также участвуют в формировании необходимого алгоритма.
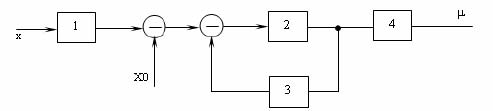
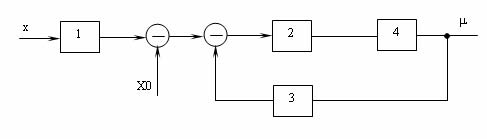
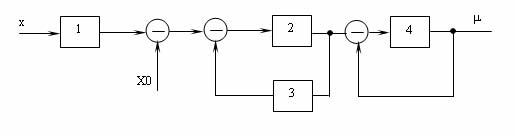
На рис. 10.1 – 10.3 изображены основные структуры, в соответствии с которыми построено большинство промышленных регуляторов с типовыми алгоритмами.
На структурных схемах приняты следующие обозначения: 1 – преобразователь входной величины X; 2 – усилительное устройство; 3 – функциональная обратная связь; 4 – исполнительное устройство (механизм), сигнал с выхода которого µ управляет объектом, X0 – уставка.
|
| Рис. 10.1 |
|
| Рис. 10.2 |
|
| Рис. 10.3 |
Преобразователь 1 может осуществлять демпфирование входных сигналов, пропорциональных регулируемым параметрам, преобразование токовых сигналов в сигналы напряжения, суммирование нескольких входных сигналов, масштабирование, активную фильтрацию помех и т.д. Формирование алгоритма осуществляется корректирующей обратной связью 3, охватывающей усилитель 2, и исполнительным устройством 4.
В структурной схеме на рис. 10.1 функциональная обратная связь 3 не охватывает исполнительное устройство 4, поэтому эта структура называется структурой без обратной связи по положению исполнительного устройства. В регулирующих устройствах этого типа устройство 4 выполняется чаще всего в виде интегрирующего двигателя с преобразователем угла поворота (датчик положения), а его передаточная функция входит в передаточную функцию закона регулирования.
В отличие от этих регуляторов структуры на рис. 10.2 соответствуют так называемым регуляторам с обратной связью по положению исполнительного устройства.
В структурной схеме на рис. 10.3 исполнительное устройство охватывается жесткой обратной связью и носит название позиционера, так как его выходная величина – регулирующее воздействие µ – пропорциональна входному. Закон регулирования определяется блоками 2 и 3.
Типовые установки централизованного контроля и управления
Установки централизованного контроля и регулирования являются основным техническим средством централизованных систем контроля, регулирования и управления. Характерными задачами, выполняемыми этим классом систем, являются дистанционный контроль, регулирование и управление технологическим объектом управления, территориально отдаленным от центрального пульта оператора. На установки централизованного контроля и регулирования в таких системах возлагаются функции измерения технологических параметров, их регистрации (непрерывной или выборочной), сигнализации (звуковой, световой) отклонений параметров от заданных значений, регистрации отдельных событий (например, аварийных), выработки регулирующих двух- или трехпозиционных сигналов, управления блоками защиты, логико-командное управления.
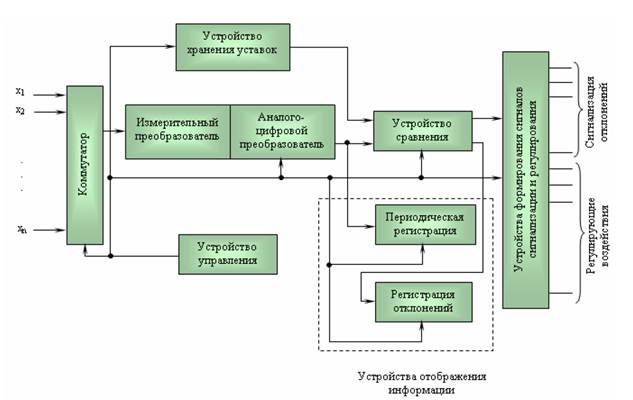
С точки зрения построения структуры установки централизованного контроля и регулирования наибольшее распространение (при достаточно большом числе контролируемых параметров) нашла структура параллельно-последовательного типа, упрощенная схема которой изображена на рис. 10.4.
Контролируемые параметры x1,…, xnподключаются с помощью коммутатора последовательно к измерительному преобразователю и аналого-цифровому преобразователю. В устройстве сравнения унифицированный сигнал (в аналоговой или цифровой форме) сравнивается с уставками (нижними и верхними допустимыми значениями). Сигналы с выхода устройства сравнения поступают на раз-личные устройства сигнализации и устройства формирования регулирующих воздействий, а также на регистрирующие устройства. Работой всей системы управляет устройство управления.
В более сложных современных установках контроля и регулирования центральным устройством является микроЭВМ, выполняющая разнообразные функции обработки информации и управления обменом данными между всеми устройствами в составе установки.
|
| Рис. 10.4 Типовая структура установки централизованного контроля и регулирования |
Комплексная автоматизация современного производства предполагает реализацию систем управления технологическими процессами в виде иерархических многоуровневых распределенных систем управления, наилучшим образом соответствующих принципам организационно-технологического управления территориально рассредоточенным производством. Техническая реализация таких систем осуществляется на основе многомашинной вычислительной системы – локальной управляющей вычислительной сети (ЛУВС) с распределенной обработкой данных. При этом функции, а следовательно, состав, производительность и программное обеспечение информационно-управляющих вычислительных комплексов (ИУВК), объединяемых в ЛУВС, оказываются чрезвычайно разнообразными, что объясняется разнообразием объектов управления и решаемых задач.
| Термин | Определение |
| Координирующий управляющий вычислительный комплекс УВК | Подсистема иерархического УВК, состоящая из одной (или более) вычислительной системы, устройства связи с оперативным персоналом и аппаратно-программных средств для автоматического обмена данными с вышестоящими подсистемами управления и координируемыми подсистемами нижестоящего уровня |
| МикроУВК | Подсистема иерархического УВК, состоящая из одной (или более) вычислительной системы на базе микроЭВМ, устройства связи с датчиками и исполнительными органами ТОУ или аппаратно-программных средств с нижестоящими подсистемами, а также средств автоматического обмена данными с вышестоящими подсистемами и подсистемами своего уровня управления и/или оперативным персоналом |
| Устройства связи с датчиками и исполнительными органами (УСДИО) | Устройства, включающие вторичные преобразователи сигналов, коммутаторы, схемы связи с каналами ввода-вывода центральной части микроУВК и другие устройства (уточненное определение устройства связи с объектом) |
| Устройства связи с оперативным персоналом (УСОП) | Устройства, обеспечивающие режим диалога или интерактивный режим работы частей УВК, требуют соответствующее программное и лингвистическое обеспечение |
| Устройства связи между ЭВМ (УСИ) | Устройства УВК, реализующие функции интерфейсов физического уровня ЛВС, адаптеров магистралей, контроллеров связи между ЭВМ различных классов и др. |
| Концентратор линий связи | Специализированное аппаратное или аппаратно-программное средство для уплотнения линий связи с ЛВС |
| Контроллер | Подсистема иерархического УВК, представляющая аппаратно и/или программно управляемый автомат, выполняющий функции управления локальным объектом и работающий по однозначно заданным алгоритмам без взаимодействия с оперативным персоналом |
| Микропроцессор широкого назначения | Программно- или микропрограммноуправляемый процессор, выполненный в виде одной (монолитный) или нескольких БИС |
| Специализированный микропроцессор | Устройство на одной или нескольких БИС, логическая схема которого спроектирована для строго определенного вида математической и логической обработки данных (например, интерполирование); к разновидности можно отнести так называемый процессор сигналов, предназначенный для цифровой обработки аналоговых сигналов - включает АЦП |
| МикроЭВМ широкого назначения | Конструктивно законченная ЭВМ на основе микропроцессорного набора БИС или одной БИС, имеющая архитектуру универсальной ЭВМ с программным управлением |
| Специализированная микроЭВМ | Конструктивно законченная ЭВМ на основе специализированного микропроцессора или микропроцессора широкого назначения, ориентированного на строго определенный вид обработки данных |
Особенности функционирования ИУВК в АСУ ТП
Информационно-управляющий вычислительный комплекс, основное назначение которого в АСУ ТП состоит в управлении совокупностью объектов управления, в том числе и динамических, должен работать в реальном масштабе времени. Реальный масштаб времени заставляет учитывать по крайней мере две особенности систем с ИУВК в контуре управления:
1. Запаздывание при формировании управления на каждом периоде дискретности, обусловленное природой цифрового управления; его величина ограничена допустимым значением, задаваемым при проектировании системы управления, и зависит от состояния управляемого процесса и собственно ИУВК.
2. Эффект старения информации, вызванный тем, что измерение координат в цифровой системе управления осуществляется последовательно во времени с некоторым шагом ∆t, а оценка состояния системы, выработка управляющего воздействия и прогноз поведения системы требуют, как правило, значения вектора измеримых координат в определенный, фиксированный момент времени tk, при этом n⋅∆t – время, необходимое для измерения n координат системы. Поэтому приходится, используя различные способы экстраполяции, восстанавливать значение каждой i -й координаты системы на интервале времени tk+(n-1)⋅∆t. Учитывая, что погрешность экстраполяции зависит от статистических характеристик восстанавливаемой функции и от времени экстраполяции, необходимо выбрать такую последовательность опроса датчиков, при которой суммарная погрешность экстраполяции минимально влияла бы на качество управления. Эффект старения информации может привести к ситуации, когда увеличение числа измеримых координат не приводит к улучшению качества управления.
По тем же причинам оказывается не всегда выгодным использование сложных алгоритмов экстраполяции, так как это увеличивает общее время опроса. Учет реального времени в управляющем вычислительном комплексе осуществляется специализированным устройством – таймером.
ИУВК в АСУ ТП работает с большим числом источников и потребителей информации, каждый из которых работает асинхронно, т.е. информация от объектов и запросы на обслуживание поступают в произвольные моменты времени. Асинхронность поступления заявок приводит к тому, что в условиях ограниченного ресурса ИУВК в вычислительной системе формируется очередь на обслуживание. Учитывая, что ИУВК работает в реальном масштабе времени, а информация в системе имеет различную ценность и достоверность, обслуживание заявок в ИУВК является приоритетным. В связи с необходимостью приоритетного обслуживания заявок в ИУВК организуется система прерываний, под которой понимается совокупность аппаратных и программных средств, обеспечивающая переключение процессора с выполняемой программы на другую, имеющую более высокий приоритет, при этом сохраняется возможность возврата к прерванной программе.
Работа ИУВК в реальном масштабе времени с большим числом источников и потребителей информации в условиях ограниченных ресурсов ИУВК требует организации мультипрограммного режима работы ИУВК, т.е. режима, при котором параллельно выполняется несколько программ путем совмещения работы во времени внешних устройств и процессора. Технические средства ИУВК, работающего в мультипрограммном режиме, должны обеспечивать одновременное хранение в оперативном запоминающем устройстве нескольких программ; допускать параллельную работу процессора и внешних устройств; организацию прерывания программ, а ее программное обеспечение – планировать порядок выполнения задач; распределять ресурсы ИУВК; производить защиту памяти от несанкционированного вмешательства одной задачи в другую при их параллельной работе и выполнять ряд других функций.
При реализации системы управления технологическими процессами и производством в целом необходимо выбирать ИУВК, наилучшим образом удовлетворяющий решаемой задаче. При этом необходимо учитывать, что в современных АСУ ТП информационно-управляющий комплекс очень редко работает как самостоятельное, обособленное, не включенное в ЛУВС устройство.
ИУВК в АСУ ТП (особенно в контуре прямого цифрового управления), как правило, не должен производить сложных расчетов с высокой точностью. Это позволяет использовать в АСУ ТП ИУВК с коротким машинным словом (1-2 байт). Короткое машинное слово, резко снижая объем схемотехнического оборудования, требует разработки вычислительных машин с архитектурой, отличной от архитектуры универсальных ЭВМ, ориентированных на выполнение вычислительных работ большого объема и высокой точности.
С другой стороны, достижения микроэлектронной технологии сделали возможным выпуск сравнительно дешевых, высоконадежных и высокопроизводительных вычислительных машин, что, возможно, потребует в какой-то степени пересмотреть вопросы организации системы управления технологическими процессами.
ИУВК в АСУТП должны иметь повышенную надежность, которая достигается резервированием аппаратуры. Здесь следует выделить два основных направления. Первое – разработка ИУВК в виде отказоустойчивой вычислительной сети, включающей в себя несколько ИУВК и допускающей реконфигурации технических и программных средств. Второе – разработка отказоустойчивого (толерантного) ИУВК путем дублирования отдельных блоков и узлов с самодиагностикой и возможностью подключения резервного блока вместо отказавшего.
Функциональная организация ИУВК в АСУ ТП
Информационные и управляющие функции ИУВК, регламентируемые Общеотраслевыми руководящими методическими материалами (ОРММ) по созданию АСУ ТП, и особенности функционирования ИУВК в АСУ ТП делают необходимым реализацию ИУВК в виде специализированного комплекса, включающего в себя:
• устройство центрального управления и арифметической и логической обработки информации (ПРОЦЕССОР);
• устройство связи с объектом (УСО);
• устройства хранения информации (ПАМЯТЬ);
• устройства внутрисистемной связи, обеспечивающие связь между отдельными модулями (устройствами) собственно ИУВК, и устройства внесистемной связи (модемы, телефонные, кабельные и другие линии связи);
• устройство связи с оперативным персоналом (операторами-технологами; диспетчерскими службами, обслуживающим персоналом и др.);
• устройство отсчета реального времени (ТАЙМЕР).
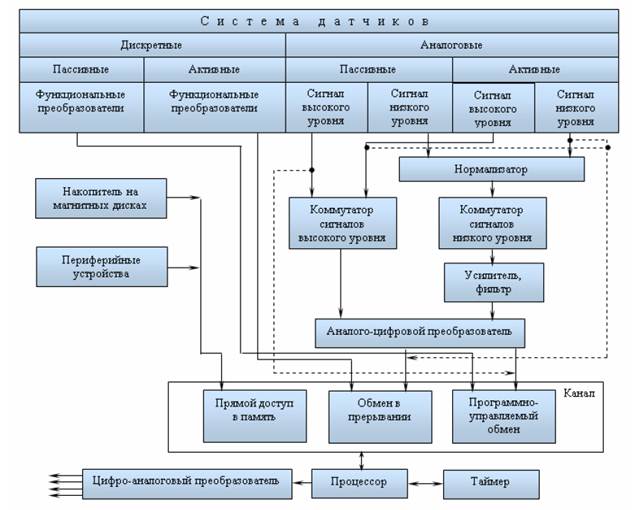
Функциональная схема ИУВК приведена на рис. 11.1.
|
| Рис. 11.1 Функциональная схема ИУВК |
Все источники и потребители информации в АСУ ТП подразделяются на пассивные, работа которых инициируется процессором, и инициативные (активные), которые по собственной инициативе, на основании анализа состояния управляемого процесса и комплекса технических средств, включая ИУВК, выставляют запрос на необходимые им ресурсы АСУ ТП. Признак пассивности (инициативности) устройства задается при генерации операционной системы ИУВК. В связи с этим в ИУВК реализуются обмены: программно-управляемый без прерывания, программно-управляемый в режиме прерывания, обмен в режиме прямого доступа к памяти (ПДП).
Каждый из режимов обмена имеет характерные особенности и отличается временем доступа.
Реализация обмена ИУВК осуществляется КАНАЛОМ ввода-вывода, который всегда может рассматриваться как обособленное логическое устройство управления обменом. В отличие от универсальных вычислительных машин, в которых канал выполняется в виде специализированного устройства, работающего по собственной программе, в ИУВК, как правило, реализуется так называемый встроенный канал, в котором функции канала распределены между процессором, контроллерами периферийных устройств и специализированными схемами.
Преобразование аналогового сигнала в машинное слово включает в себя совокупность операций, которая образуется из операций нормализации, фильтрации, коммутации, усиления, аналого-цифрового преобразования и записи полученного кода в буферный регистр. Каждая из операций характеризуется временем преобразования τ и точностью выполнения δ. Время выполнения рассматривается как запаздывание. Аналогичными показателями характеризуется и тракт ввода дискретных сигналов. Каждому инициативному источнику (потребителю) информации противопоставляется, кроме того, приоритет p, характеризующий в каждый заданный момент времени важность источника или потребителя информации в системе. Таким образом, каждому источнику информации противопоставляются в АСУ ТП следующие параметры: δ - точность преобразования, τ - время преобразования, p – относительный приоритет.
Все эти параметры являются обобщенными и зависят от используемых технических средств и алгоритмов преобразования. Выбор технических средств и алгоритмов преобразования определяются измеряемым сигналом и характеристика-ми используемого датчика.
Структурная организация ИУВК
Модульная организация ГСП и многоуровневая система унифицированных интерфейсов позволяют компоновать специфицированные комплексы технических средств АСУ ТП, полностью учитывающие особенности управляемого процесса.
В соответствии с функционально-целевым назначением промышленность выпускает терминальные и базовые вычислительные комплексы, обеспечивающие решение типовых задач АСУ ТП следующих уровней:
1. Уровень формирования дискретного сообщения. Формирователями сообщений являются аналоговые и дискретные датчики, удовлетворяющие требованиям ГСП. Источники информации этого уровня имеют последовательный или параллельный низкоскоростной ввод.
2. Уровень регистрации и диспетчеризации сообщений. Сообщения, поступившие с рабочих мест, контролируются (аппаратно), привязываются к временным меткам и концентрируются. Аппаратура уровня может работать в режиме накопления и в режиме передачи.
3. Уровень терминального процессора. Терминальный процессор выполняет роль программируемого мультиплексора, обеспечивая прием и передачу информации на различных скоростях и различной разрядности. К нему могут быть подключены высокоскоростные источники и, в частности, мини- и микроЭВМ, осуществляющие управление локальными подсистемами АСУ ТП.
4. Уровень коммутации сообщений от подсистем сбора и первичной обработки информации. Терминальные процессоры могут непосредственно подключаться к аппаратуре более высокого уровня.
5. Уровень многомашинных комплексов. Аппаратура этого уровня позволяет объединять ЭВМ различных классов в единый комплекс.
Структурная организация ИУВК, т.е. способ соединения отдельных устройств, в значительной степени определяет надежность и живучесть комплекса, сложность его программного обеспечения и удобство эксплуатации.
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 3125; Нарушение авторских прав?; Мы поможем в написании вашей работы!