КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Комплексы судовождения
|
|
|
|
Автоматизированные
Методические указания
к выполнению лабораторной работы № 5
«Структурный анализ информационного
взаимодействия элементов ИСУ»
Утверждено
Ученым советом АМИ ОНМА
протокол № 9 от 07.05.2015
Мариуполь
УДК 656.61.052
А 22
ББК 39.42- 05
Автоматизированные комплексы судовождения: методические указания к выполнению лабораторной работы № 5 «Структурный анализ информационного взаимодействия элементов ИСУ» / Сост. Г.И. Сухов, О.В. Жерлицина – Мариуполь: АМИ ОНМА, 2015. – 12 с.
Составители: Г.И. Сухов, ст. преп. кафедры ЭиИТ
О.В. Жерлицина, ст. преп. кафедры ЭиИТ
Методические указания к лабораторным работам по дисциплине «Автоматизированные комплексы судовождения» (АКС) составлены для студентов 4 курса специальности «Судовождение» всех форм обучения Азовского морского института Одесской национальной морской академии.
Рассматриваются основные принципы работы с интегрированными системами управления АКС, возможности и модели интегрированных систем управления (ИСУ) судового мостика. Структурный анализ информационного взаимодействия элементов.
Методичні вказівки до лабораторних робіт з дисципліни «Автоматизовані комплекси судноводіння»(АКС) складені Для студентів 4 курсу спеціальності «Судноводіння» всіх форм навчання Азовського морського інституту Одеської національної морської академії. Розглядаються основні принципи роботи з інтегрованими системами управління АКС, можливості і моделі інтегрованих системам управління (ІСУ) суднового містка. Структурний аналіз інформаційної взаємодії елементів
Рецензент: А.А. Ломов,
зав. ЦППКМ, к.д.п.
Рассмотрено и одобрено
на заседании кафедры ЭиИТ
протокол № 6-01/15 от 23.01.2015
Рекомендовано методическим
советом АМИ ОНМА
протокол № 5 от 19.03.2015
© Азовский морской институт ОНМА, 2015
Содержание
| Введение ……………………………………………………. | ||
| Цель работы………………………………………………… | ||
| Задание……………………………………………………… | ||
| Общие сведения…………………………………………….. | ||
| Описание состава типового комплекса …………………... | ||
| Порядок выполнения………………………………………. | ||
| Оформление отчета………………………………………… | ||
| Список рекомендуемой литературы………………………. |
ВВЕДЕНИЕ
В зависимости от того, где происходит первое знакомство курсанта-судоводителя с интегрированными системами управления (ИСУ) судового мостика – на борту судна или при изучении курса автоматизированных комплексов судовождения (АКС) – ему, как оператору таких систем, необходимо четко представлять существующую информационную взаимосвязь между основными компонентами ИСУ.
В процессе выполнения данной лабораторной работы, студентам предоставляется возможность изучить существующие взаимосвязи и логику современного АКС, построить модель комплекса по аналогу с типовым и произвести анализ возможностей комплекса. Интегрированная информационная система ходового мостика (ИСМ) представлена в виде панели объектов с набором входных и выходных параметров.
1 Цель работы
Провести структурный анализ информационных взаимодействий элементов ИСУ, в центре которой находится оператор комплекса.
2 Задание
1. Ознакомиться со схемой типового комплекса (рис. 1).
2. Изучить существующие взаимосвязи составных элементов и логику построения схемы.
3. Провести анализ имеющихся данных и предоставить собственное предложение по расширению возможностей комплекса.
3 ОБЩИЕ СВЕДЕНИЯ
На основании ряда выходных параметров оператор управляет установками с помощью информационно-управляющих систем различного уровня сложности. Установки, в свою очередь, включают в себя сенсоры, которые информируют АКС об их текущем состоянии.
На панели применяется цветовая индикация входных и выходных параметров (название параметра и информационный канал):
- синий цвет обозначает исходящие данные, названия;
- красный цвет – входящие данные;
- лиловая окраска свидетельствует о том, что данные передаются в обоих направлениях.
4 Описание состава типового комплекса
На нижнем уровне комплекса установлены сенсоры, которые выдают в магистральную шину выходные параметры. Выходные параметры сенсоров являются входными параметрами для других систем, подключенных к шине. В случаях сенсоров внутри законченной консоли оборудования, их исходящие сигналы поступают непосредственно в приборы для обработки информации и ее дальнейшей выдачи в шину комплекса.
Входящие в состав типового комплекса объекты (рис. 1) подразделяются на типы согласно их свойствам.
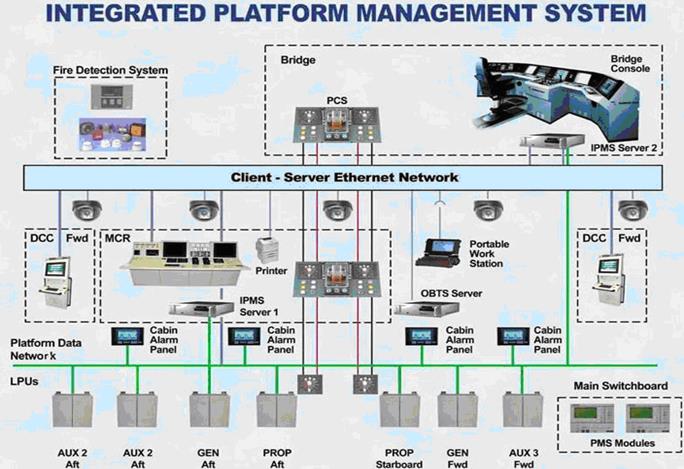
Рис. 1 – Типовая схема ИСМ.
Тип Human being – «Человек»
· Объект «Operator» – Оператор
Тип «Machinery» – «Установка»
· Объект «Steering Gear» – Рулевое устройство
· Объект «Propulsion Unit» – Двигательная установка
· Объект «Thruster(s)» – Подруливающие устройства
· Объект «Anti-rolling System» – Система успокоения качки
Тип «Alerms und Signals» – «Сигнальное оборудование»
· Объект «SSAS» – ССОС
· Объект «AIS Transmitter» – Передатчик АИС
· Объект «Signalling Panel» – Сигнальная панель
Тип «Equipment» – «Приборы (Оборудование)»
· Объект «Autopilot» – Авторулевой
· Объект «GMOSS Equipment» – Оборудование ГМССББ
· Объект «ECDIS/ECS» – МИС
· Объект «S VDR» – РДР
Тип «Dedicated Equipment sensors» – «Сенсоры оборудования»
· Объект «Radar Skanner» – Сканер радара
· Объект «E/S Transducer» – Приемопередатчик эхолота
· Объект «Gyro Sensor» – Гирокомпасный сенсор
· Объект «Rot Indicator» – Индикатор угловой скорости поворота
· Объект «Log» – Лаг
· Объект «GPS Receiver» – Приемник GPS
· Объект «AIS Receiver» – Приемник АИС
· Объект «E Magnetic Compass» – Электромагнитный компас
· Объект «Heal Indicator» – Кренометр
· Объект «Draft Sensors» – Сенсоры замера осадки
· Объект «Wind Indicator» – Индикатор скорости и направления ветра
· Объект «Audio Sensors» – Звуковые сенсоры (микрофоны)
· Объект «Video Sensors» – Видео сенсоры (видеокамеры)
Рассмотрим интегратор информации судового оборудования Navi-Conning (рис. 2).

Рис. 2 – Navi-Conning 3000.
Navi_Conning 3000 – программно-аппаратный комплекс, позволяющий отображать информацию от различных внешних сенсоров о состоянии и работе судового оборудования на одном экране, в соответствии с настройками пользователя. Эта система значительно облегчает работу вахтенных, постоянно предоставляя достоверную информацию по работе судовых систем. В комбинации с ИСМ составляет высокоэффективную Интегрированную Навигацион-ную Систему, особо востребованную в условиях ограниченного бюджета и свободного пространства.
В ходе выполнения лабораторной работы курсанты знакомятся с типовой структурной схемой Navi-Conning (рис. 3).

Рис. 3 – Структурная схема Navi-Conning.
Курсант наделяет каждый объект (рис. 4) входными и выходными параметрами, выбирая информацию от внешних сенсоров по рис. 3. Правильность выбора параметров, обязатель-ных для каждого из объектов. Название и информационный канал оценивается после выполнения работы.
Выполненной считается работа с описанием такого комплекса, в котором все его элементы получают минимальный набор входящих параметров.
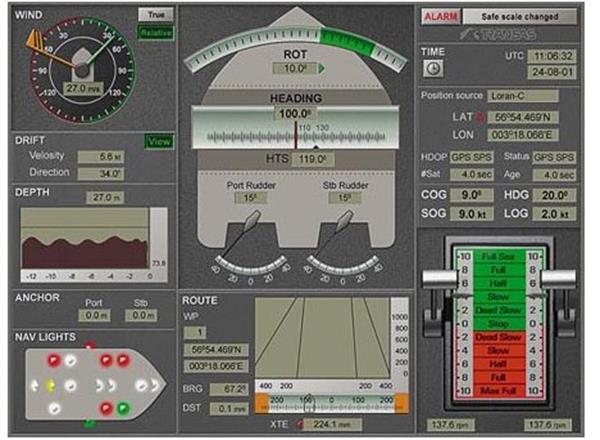
Рис. 4 – Схема типового комплекса.
Курсанты знакомится с типовой схемой Bridge Console – многофункциональным местом для вахтенного офицера, представленной на рис. 5.

Рис. 5 – Типовая схема Bridge Console.
Курсант наделяет каждый объект входными и выходными параметрами, выбирая информацию от внешних сенсоров по рис. 6. Правильность выбора обязательных, для каждого из объектов, параметров, его название и информационный канал оценивается после выполнения работы.
Выполнением работы считается описание такого комплекса, в котором все его элементы получают минимальный набор входящих параметров.
Курсант знакомится с типовой конфигурацией мостика Bridge Console (рис. 6) – многофункциональным местом для вахтенного офицера.
Курсант наделяет каждый объект входными и выходными параметрами, выбирая информацию от внешних сенсоров. Оценивается правильность выбора обязательных для каждого из объектов параметров, название параметра и информационный канал.
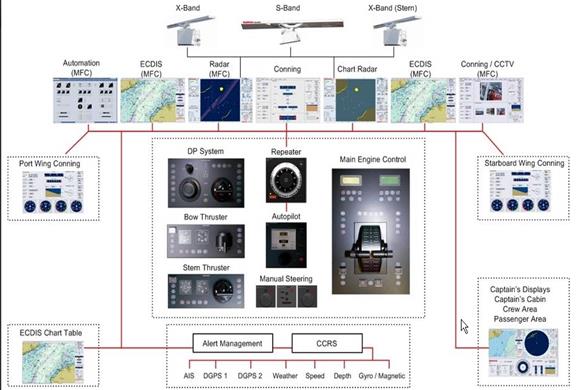
Рис. 6 – Типовая конфигурация мостика Bridge Console.
Highly Advanced Configuration
1. Radar and ECDIS Chart Radar – радар и карт-плоттер ECDIS.
2. Conning – коннинг дисплей.
3. Multifunctional Workstations for Navigation – 2 многофункциональных места для вахтенного офицера.
4. CCTV and Automation – Сlosed Circuit Television – камеры и дисплеи.
5. Wing Conning – конинг на крыле.
6. Separate ECDIS Chart Table – ECDIS карты.
7. Captain's Displays – монитор капитана.
8. NP 5000 and NautoSteer AS – авторулевой.
9. Thruster Controls – управление подруливающим устройством.
10. Full Sensor Package and CCRS – навигационные датчики.
Выполнением работы считается описание такого комплекса, в котором все его элементы получают минимальный набор входящих параметров.
5 Порядок выполнения работы
1. Ознакомиться с типовой схемой ИСМ (рис. 1).
Каждый объект наделяется входными и выходными параметрами, выбирая их из общего списка. Затем оценивается правильность выбора обязательных для каждого из объектов параметров. Название параметра и информационный канал синего цвета обозначает исходящие данные. Названия и информационный канал красного цвета – входные данные. Черная окраска информационного канала свидетельствует о том, что данные передаются в обоих направлениях.
2. Построить такой комплекс, в котором все элементы получают минимальный набор входящих параметров.
6 Оформление отчета
1. Титульный лист, оформленный согласно принятой форме.
2. Схема информационных взаимосвязей с указанием перечня параметров для каждого прибора.
Список рекомендуемой литературы
1. Вагущенко Л.Л. Бортовые автоматизированные системы контроля мореходности / Л.Л. Вагущенко, А.Л. Вагущенко, С.И. Заичко. – Одесса, Феникс, 2005. – 272 с.
2. Вагущенко Л.Л. Поддержка решений по расхождению с судами / Л.Л. Вагущенко, А.Л. Вагущенко. – Одесса: Феникс, 2010. – 229 c.
3. Вагущенко Л.Л. Интегрированные системы ходового мостика / Л.Л. Вагущенко. – Одесса: Латстар, 2003. – 169 c.
4. Вагущенко Л.Л. Автоматизовані комплекси судноводіння: підручник / Л.Л Вагущенко, А.А Кошовий. – К.: ВКВІЦ, 2000. – 292 с.
Учебное издание
Составители: СУХОВ Геннадий Иванович
Жерлицина Ольга Викторовна
Автоматизированные
комплексы судовождения
Методические указания
к выполнению лабораторной работы № 5
«Структурный анализ информационного
взаимодействия элементов ИСУ»
на русском языке
Редактор Орловская А.Н.
Подписано в печать 07.05.2015. Формат 60×84/16.
Бумага тип. 2. Усл. печ. л. 0,96.
Тираж 30 экз. Заказ № 259/783.
Отпечатано в информационно-техническом центре АМИ ОНМА.
87517, г. Мариуполь Донецкой обл., ул. Черноморская, 19.
|
|
|
|
Дата добавления: 2017-01-14; Просмотров: 1183; Нарушение авторских прав?; Мы поможем в написании вашей работы!