КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тяжелые личностные расстройства
|
|
|
|
Iv.'IM.
ПРОМЫШЛЕННЫХ РОБОТОВ
Развитие робототехники связано с созданием не только роботом как принципиально нового типа машин, но и роботизированных производств, объектов и процессов. Для робота характерно активное и целенаправленное информационное И физическое взаимодействие с внешней средой. Типовыми уз-лами (модулями) робота являются исполнительные органы — механические руки-манипуляторы, управляющие устройства, приводящие в движение приводы манипуляторов, устройства накоплении, хранения и переработки информации в виде микропроцессора, входящего в состав робота, или автономной ЭВМ, а также блоки информации о состоянии внешней среды — сенсорные устройства (по аналогии с человеком—органы чуисти робота). В ряде случаев робот имеет и органы передвижении. Конструктивно робот может быть выполнен в напольном варианте с колесным, гусеничным или механическим перемещением и в подвесном (поточном варианте) — с возможностью перемещения по монорельсу и тельферным балкам
В настоящее время робот является принципиально новым •типом технического устройства, обладающего искусственным интеллектом,— способностью воспринимать окружающую среду и активно воздействовать на нее, изменяясь в соответствии с априорными целями и совершенствуясь в ходе этого процесса [66].
Па рис. 1 показана типовая структурная схема устройст-мл робота и функциональные связи схемы его управления. Робот состоит из манипулятора —руки (М), устройств передвижения (УП) и управления (УУ), имеющего пульт управления (ПУ), запоминающего (ЗУ) и вычислительного устройств (ВУ), блока управления приводами (БУП) манипулятора и устройства передвижения (рис. 1, а).
Манипулятор робота обычно представляет собой многозвенный шарнирный механизм с кистью — захватным устройством.
Пульт управления робота предназначен для ввода в управляющее устройство задания в виде программы команд и контроля правильности исполнения задания. Запоминающее устройство является органом, в котором хранятся информация о программе работы робота, порядке взаимодействия блоков УУ и другие данные. В вычислительном устройстве реализуется алгоритм управления роботом. Блок управления приводами манипулятора в требуемой последовательности осуществляет подачу команд на исполнительные органы — приводы манипулятора и устройства передвижения робота. Манипуляторы и устройства передвижения являются в совокупности объектом управления О для управляющего уст-
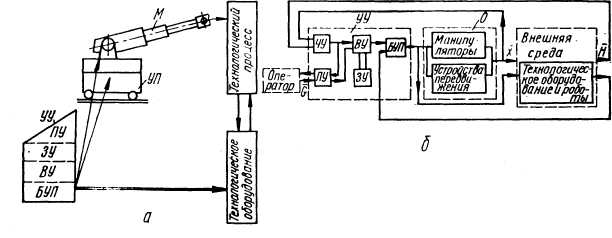
Рис. 1. Принципиальное устройство промышленного робота:
а — структурная схема и основные узлы; б — функциональные связи
схемы управления.
Свойства (рис. 1, б). На схеме функционального взаимодействия блоков и органов робота показаны связи отдельных звеньев системы управления, начиная от введения задания оператором и кончая поступлением в комплекс чувствительных (сенсорных) устройств (ЧУ) информации X о состоянии робота и Н — о состоянии внешней среды, которая через блоки В У и БУП трансформируется в задание V на приводы манипулятора и устройства передвижения.
Одним из прогрессивных направлений в робототехнике является создание конструктивно-унифицированных рядов промышленных роботов и модульное построение их конструкций. Решая задачу унификации номенклатуры типажа промышленных роботов для механической обработки, их узлов и блоков, необходимо учитывать фактор конструктивно-технологической совместимости роботов с обслуживаемым технологическим оборудованием.
Модульный принцип построения промышленных роботов для механообрабатывающих "цехов состоит в том, что из конструктивно законченных, унифицированных или стандартных узлов (модулей для каждой конкретно решаемой задачи)
можно собрать робот или робототехническую систему, выполняющую требуемую функциональную задачу. В качестве модулей роботов и компонуемых из них робототехнических систем могут быть использованы устройства подъема, подъема и поворота, поворота и перемещения с устройством фиксации, поворота, поворота и перемещения, вращения, качания, выдвижения, выдвижения и вращения, горизонтального и вертикального ходов руки, движения кисти, а также элементы несущих конструкций (корпус, основание, траверса, кронштейн) и захватных устройств.
Конструкция модуля зависит от используемого в нем при-водного устройства (пневматического, гидравлического, электрического, комбинированного). Например, модули с пневматическим и гидравлическим приводами имеют пневмо- или гидроцилиндры, пневмо- или гидромоторы, а также соответст-вующие передаточные механизмы. В модулях с электроприводом основныными элементами являются электродвигатель, редуктор или электродвигатель со встроенной шариковой передачей.
Существенное влияние на конструкцию модулей с приводными устройствами оказывает тип управляющего устройства (цикловое, позиционное, адаптивное, контурное,), обусловливающий применение различных конечных выключателей, релейных схем, фазовых, кодовых и других чувствительных устройств.
Конструкция модуля определяется также условиями его эксплуатации (степень пылезащищенности, взрывобезопасность исполнения, теплозащищенность, пожаробезопасность и т. д.)..
На рис. 2 показаны некоторые схемы унифицированного ряда модулей манипуляторов промышленных роботов. На базе этих конструкций могут быть собраны любые модули роботов
 Фирма «Кавасаки» (Япония) разработала модули систем управления, которые могут использоваться для различных моделей роботов [68]. Каждая модель робота оснащается одним из четырех модулей системы управления
Фирма «Кавасаки» (Япония) разработала модули систем управления, которые могут использоваться для различных моделей роботов [68]. Каждая модель робота оснащается одним из четырех модулей системы управления
Лю6ая модель робота фирмы «Кавасаки» может быть дополнительно оснащена различными сенсорными датчиками для определения формы и расположения детали, ее габаритных парамеров, присутствия или отсутствия, направления движения, цвета, массы, а также для измерения давления, крутящего момента, усилия, твердости, температуры и т. п.
Кроме того, дополнительно поставляются системы автоматизированной смены схвата, различные типы схватов и рук, система перезаписи программы с вспомогательной памятью.
Приведенные данные свидетельствуют о том, что принцип модульного конструирования находит широкое распространение как в отечественной, так и в зарубежной практике роботостроения.
Модульный метод конструирования промышленных роботов для механической обработки позволяет выбрать конструкцию робота оптимального типа; существенно сократить цикл «разработка — изготовление — внедрение» робота, так как для создания нового робота используются унифицированные модули; значительно снизить затраты на проектирование и изготовление одной модели промышленного робота; сконструировать робот, скомпонованный в любой системе координат (прямоугольная, цилиндрическая, сферическая, комбинированная), с широким диапазоном перемещения руки и, при необходимости, с предельным упрощением конструкции до использования только одной или двух координат; расширить области применения роботов, так как робот модульной конструкции обладает большей универсальностью (избыточностью), чем робот обычной конструкции, и поэтому легко может быть перекомпонован на выполнение различных операций; существенно упростить ремонт робота в процессе его эксплуатации, а также проведение профилактических, регламентных и контрольно-регулировочных работ, создать условия для разработки и внедрения средств диагностики роботов в процессе их эксплуатации.
Модульный метод конструирования позволяет практически реализовать идею переналаживаемых робототехничёских систем (РТС). Действительно, имея широкий набор стандартных модулей, можно скомпоновать робототехнический комплекс любой сложности или робототехническую систему для изготовления деталей.
|
|
|
|
|
Дата добавления: 2017-01-14; Просмотров: 278; Нарушение авторских прав?; Мы поможем в написании вашей работы!