КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Режим разрывного управления DTC
|
|
|
|
Для начала необходимо, определить те функциональные блоки, структурные схемы которых обеспечивают режим разрывного управления. Разделение системы на отдельные подсистемы целесообразно проводить в соответствии с приведенной на рис. функциональной схемой. В этом случае система DTC включает в себя:
- блок регуляторов системы DTC;
- блок формирования строк таблицы переключений;
- блок определения фазового сектора;
- блок, реализующий таблицу переключений;
- блок формирования фазных напряжений;
- блок вычисления ненаблюдаемых координат электропривода.
Для блока регуляторов системы DTC входными воздействиями являются
управляющий сигнал  , пропорциональный заданной частоте вращения
, пропорциональный заданной частоте вращения  . Опорный сигнал
. Опорный сигнал  , пропорциональный заданному значению модуля
, пропорциональный заданному значению модуля
потокосцепления статора двигателя  , а также сигналы обратных связей по фактическим значениям контролируемых переменных: по модулю потокосцепления статора
, а также сигналы обратных связей по фактическим значениям контролируемых переменных: по модулю потокосцепления статора  , по электромагнитному моменту
, по электромагнитному моменту  и по
и по
частоте вращения двигателя  . Выходные сигналы этой подсистемы- коммутационные функции релейных регуляторов потокосцепления статора и электромагнитного момента двигателя
. Выходные сигналы этой подсистемы- коммутационные функции релейных регуляторов потокосцепления статора и электромагнитного момента двигателя  и
и  ,которые являются входными воздействиями для следующей подсистемы блока формирования строк таблицы переключений. Выходными сигналами этой подсистемы являются номера строк таблицы SI- S8, количество которых определяется выбранной конфигурацией релейных регуляторов
,которые являются входными воздействиями для следующей подсистемы блока формирования строк таблицы переключений. Выходными сигналами этой подсистемы являются номера строк таблицы SI- S8, количество которых определяется выбранной конфигурацией релейных регуляторов  и
и  принятой таблицей
принятой таблицей
переключений. Минимальное количество строк таблицы 4,максимальное 8. Поэтому на рис.9 связи S5 - S8 показаны пунктиром.
Следующей подсистемой является блок определения фазового сектора. Входными воздействиями для этой подсистемы являются составляющие
потокосцепления статора в неподвижной системе координат  и
и  . В ряде случаев удобнее использовать в качестве входных сигналов для этой подсистемы, не составляющие вектора потокосцепления статора, а
. В ряде случаев удобнее использовать в качестве входных сигналов для этой подсистемы, не составляющие вектора потокосцепления статора, а
тригонометрические функции угла  . Выходными сигналами этой подсистемы являются номера столбцов таблицы переключений N1-N6. Выходные сигналы формирователя строк таблицы переключений и определителя фазового сектора представляют собой входные управляющие воздействия для следующей подсистемы, реализующей таблицу переключений. Выходными сигналами таблицы являются восемь возможных пространственных состояний результирующего вектора выходного
. Выходными сигналами этой подсистемы являются номера столбцов таблицы переключений N1-N6. Выходные сигналы формирователя строк таблицы переключений и определителя фазового сектора представляют собой входные управляющие воздействия для следующей подсистемы, реализующей таблицу переключений. Выходными сигналами таблицы являются восемь возможных пространственных состояний результирующего вектора выходного
напряжения преобразователя частоты  . Эти сигналы являются входными воздействиями для подсистемы, в которой воспроизводится блок формирования фазных напряжений. Выходные сигналы формирователя
. Эти сигналы являются входными воздействиями для подсистемы, в которой воспроизводится блок формирования фазных напряжений. Выходные сигналы формирователя
фазных напряжении  представляют собой алгоритм
представляют собой алгоритм
переключения электроны ключей силового инвертора преобразователя частоты. Они же служат входными воздействиями для последней подсистемы - блока вычисления ненаблюдаемых координат электропривода. Формирователь строк таблицы переключений, определитель фазового сектора, таблица переключений и формирователь фазных напряжений образуют так называемое ядро DTC. В иностранной литературе эта часть системы называется «DTC Core»
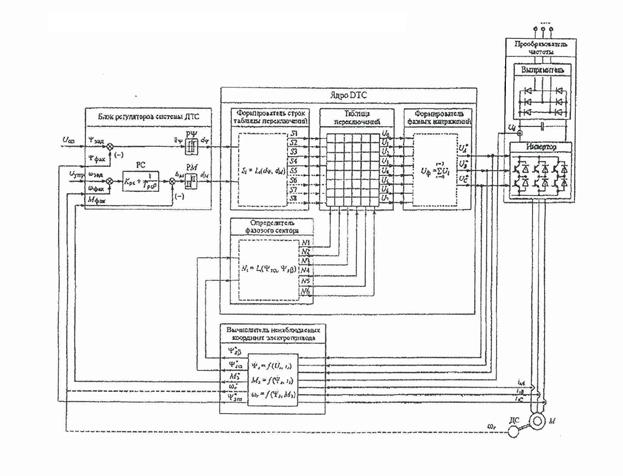
Рис.9 Функциональная схема системы управления.
Помимо сигналов  и
и  входными воздействиями для вычислителя ненаблюдаемых координат являются сигнал с выхода датчика напряжения в звене постоянного тока преобразователя частоты
входными воздействиями для вычислителя ненаблюдаемых координат являются сигнал с выхода датчика напряжения в звене постоянного тока преобразователя частоты  и сигналы с датчиков фазных токов в статорной цепи электродвигателя
и сигналы с датчиков фазных токов в статорной цепи электродвигателя  . На выходе этой подсистемы получаются сигналы, пропорциональные составляющим вектора потокосцепления статора в системе координат
. На выходе этой подсистемы получаются сигналы, пропорциональные составляющим вектора потокосцепления статора в системе координат  и
и  , модулю потокосцепления статора
, модулю потокосцепления статора  , электромагнитному моменту
, электромагнитному моменту  и частоте вращения ротора двигателя
и частоте вращения ротора двигателя  . Символом (*) обозначена вычисленные значения переменных. Составляющие вектора потокосцепления статора и служат входными воздействиями для определителя фазового сектора. Остальные сигналы
. Символом (*) обозначена вычисленные значения переменных. Составляющие вектора потокосцепления статора и служат входными воздействиями для определителя фазового сектора. Остальные сигналы  используются в качестве сигналов обратных связей для блока регуляторов системы DTS. Если сигналы обратных связей по модулю вектора потокосцепления статора и по электромагнитному моменту двигателя всегда вычисленные, то сигнал обратной связи по частоте вращения двигателя может быть как вычисленным
используются в качестве сигналов обратных связей для блока регуляторов системы DTS. Если сигналы обратных связей по модулю вектора потокосцепления статора и по электромагнитному моменту двигателя всегда вычисленные, то сигнал обратной связи по частоте вращения двигателя может быть как вычисленным  и полученным путём прямой
и полученным путём прямой
индикации с помощью вращающегося датчика частоты вращения . Поэтому на рис.9 эти две связи, исключающие друг друга, показаны пунктиром.
Основой любого DTC-алгоритма является таблица переключений силовых электронных ключей автономного инвертора. В неё заранее внесены те положения результирующего вектора напряжения автономного инвертора, которые он должен принимать на фазовой плоскости при той или иной совокупности управляющих воздействий. От того, насколько удачно сформирована таблица переключений, в существенной мере зависит качество работы системы в целом. Эта таблица, как и все остальные функциональные блоки в системах DTC, реализуется микропроцессорными средствами. В большинстве зарубежных публикаций этот блок называется "switching table". Иногда его называют также "vector selection table" или "optimum pulse selector".
Функциональная задача таблицы переключений, как ключевого блока системы DTC, состоит в следующем. Результатом табличной обработки поступающей на входы таблицы переключений текущей информации о состоянии электропривода является оптимальный результирующий вектор выходного напряжения автономного инвертора. Под оптимальным здесь понимается такое новое положение этого вектора в пространстве, которое приводит к желаемому изменению контролируемых параметров системы. На выходе таблицы получаются коммутационные функции, которые поступают непосредственно на драйверы силовых электронных модулей, т.е. с помощью таблицы переключений на каждом интервале квантования по времени выбирается та или иная комбинация включенных силовых электронных модулей. Причём эта комбинация никак не зависит от предыдущего состояния автономного инвертора, а диктуется только информацией о текущих значениях контролируемых параметров. Поскольку таблица переключений сама по себе является дискретным функциональным блоком, то и исходная информация на её входы должна поступать в дискретном виде.
Для формирования столбцов таблицы переключений используется информация о том, в каком фазовом секторе на фазовой плоскости (рис. 10) в данный момент времени находится результирующий вектор потокосцепления статора.
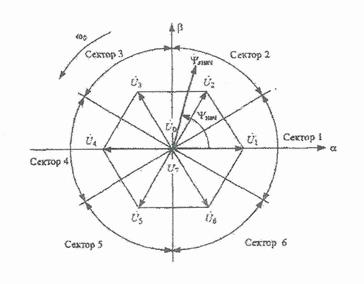
Рис. 10 Разбиение фазовой плоскости на сектора.
Таким образом, опосредовано осуществляется контроль за вращающимся магнитным полем электрической машины. Следовательно, количество столбцов в таблице переключений для трёхфазных систем всегда равно шести. Количество строк в таблице определяется возможным числом сочетаний устойчивых состояний принятых релейных регуляторов. В простейшем случае, когда в качестве регуляторов потокосцепления статора и электромагнитного момента двигателя выбраны двухпозиционные релейные элементы, количество строк таблицы равно четырём. Состояния релейных регуляторов определяются их коммутационными функциями,
которые обозначаются символами  и . У двух позиционных релейных регуляторов возможны три комбинации устойчивых состояний, т.е. три вида реализуемых коммутационных функций: d = (1,0); d = (1,-1) и d = (0,-1) в первом случае квазиустойчивое значение регулируемой переменной Z будет находиться в диапазоне
и . У двух позиционных релейных регуляторов возможны три комбинации устойчивых состояний, т.е. три вида реализуемых коммутационных функций: d = (1,0); d = (1,-1) и d = (0,-1) в первом случае квазиустойчивое значение регулируемой переменной Z будет находиться в диапазоне  , где - зона нечувствительности релейного регулятора(ширина гистерезисного допуска). Во втором случае регулируемая переменная Z будет находиться в диапазоне
, где - зона нечувствительности релейного регулятора(ширина гистерезисного допуска). Во втором случае регулируемая переменная Z будет находиться в диапазоне  . В третьем случае этот диапазон составит
. В третьем случае этот диапазон составит  .
.
Двухпозиционный регулятор первого вида наилучшим образом подходит для канала регулирования амплитуды вектора потокосцепления статора двигателя, так как задача регулирования этого канала сводится к стабилизации выходной переменной около заданного значения. В большинстве случаев регулятор этого вида и используется в качестве регулятора потокосцепления статора двигателя.
Двухпозиционный регулятор второго вида может оказаться достаточным для канала регулирования электромагнитного момента двигателя, но не всегда. Поскольку в задачу регулирования этого канала одновременно входят отработка изменения управляющего воздействия с выхода линейного регулятора скорости и отработка изменения возмущающего воздействия (момента сопротивления со стороны механизма, приложенного к валу двигателя), как правило, в системах DTC приходится использовать релейный регулятор момента более сложной конфигурации. Двухпозиционный регулятор третьего вида используется крайне редко. Внутреннее заполнение таблицы переключений, таким образом, представляет собой алгоритм работы преобразователя частоты, для схемы с двумя двухпозиционными релейными регуляторами чаще всего используется следующий закон изменения результирующего вектора выходного напряжения преобразователя частоты:
- если оба регулятора находятся в верхнем положении, т.е. заданные значения обеих контролируемых переменных превышают сигналы обратной связи, то результирующий вектор выходного напряжения в следующий момент времени следует переместить в следующий сектор на фазовой плоскости по направлению вращения вектора потокосцепления статора;
- если регулятор потокосцепления статора находится в верхнем положении, а регулятор электромагнитного момента в нижнем положении, т.е. сигнал обратной связи по электромагнитному момента превышает задание, то результирующий вектор выходного напряжения в следующий момент времени следует переместить в предыдущий сектор на фазовой плоскости против направления вращения вектора потокосцепления статора;
- если регулятор потокосцепления статора находится в нижнем положении, а регулятор электромагнитного момента - в верхнем положении, то результирующий вектор выходного напряжения в следующий момент времени следует переместить через один сектор на фазовой плоскости по направлению вращения вектора потокосцепления статора(т.е. повернуть его в пространстве на 120°);
- если оба релейных регулятора находятся в нижнем положении, Т.е. сигналы обратных связей по обеим контролируемым переменным превышают заданные значения, то результирующий вектор выходного напряжения в следующий момент времени следует переместить через один сектор на фазовой плоскости против направления вращения вектора потокосцепления статора (т.е. повернуть его в пространстве на -120°). Приведенный алгоритм может быть представлен в табл.1
Реализация таблицы переключений при математическом моделировании системы DTC может быть выполнена различными путями. Здесь принято целесообразным построение таблицы переключений с помощью типовых динамических блоков, так как это существенно упрощает операции стыковки отдельных элементов системы для объединения их в общую математическую модель. Структурная схема, реализующая таблицу переключений, приведена на рис.11
Структурная схема построена с использованием блоков умножения переменных и сумматоров, реализующих операцию логического умножения (операцию "И"). Единичные сигналы, соответствующие номерам фазовых секторов (столбцы таблицы) поступают' в схему с выхода определителя фазового сектора. Единичные сигналы, соответствующие состоянию релейных регуляторов (строки таблицы), поступают в схему с выхода формирователя строк таблицы переключений.
В наиболее употребительном и чаще всего встречающемся в публикациях варианте таблицы переключений используются двухпозиционный релейный регулятор потокосцепления и трехпозиционный релейный регулятор электромагнитного момента двигателя.
Таблица 1.
| Состояние релейных регуляторов | N=1 | N=2 | N=3 | N=4 | N=5 | N=6 | |

| 
| 
| 
| 
| 
| 
| 
|

|
|
|
|
| 
|
| |

| 
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
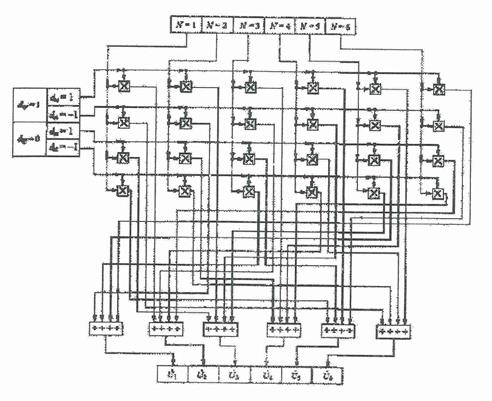
Рис. 11. Структурная схема, реализующая алгоритм переключений.
| Состояние релейных регуляторов | N=1 | N=2 | N=3 | N=4 | N=5 | N=6 |
|
|
|
|
|
|
|
|
|

| 
| 
|
|
|
|
| |
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
Следует отметить, что функционирования ядра DTC не связано ни с номинальным данными, ни с параметрами электродвигателя, ни с параметрами источника электроэнергии. В нем не содержится также никаких блоков, имеющих настроечные параметры электропривода. В некоторых источниках в состав ядра DTC включаются также релейные регуляторы потокосцепления статора и электромагнитного момента двигателя. Это, по- видимому, не вполне правомерно, так как ширина зоны нечувствительности релейного элемента (гистерезисный допуск) является важным настроечным параметром системы электропривода. От правильного выбора ширины зоны нечувствительности в существенной мере зависит качество регулирования частоты вращения двигателя системой в целом. В связи с этим представляется целесообразным включить релейные регуляторы потокосцепления статора и электромагнитного момента двигателя в состав блока регулирования системы прямого управления моментом с тем, чтобы все элементы, посредством которых осуществляется настройка конкретной системы электропривода, были бы сосредоточены в одном функциональном блоке.
|
|
|
|
|
Дата добавления: 2015-07-13; Просмотров: 494; Нарушение авторских прав?; Мы поможем в написании вашей работы!