КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Составление структурной схемы САУ
|
|
|
|
4.1. Структурная схема механической части:
|

|

|
| Мд |
| Му |
| Мс |
| w2 |
| - |
| - |
| - |
| W1(p) |
| W2(p) |
| W3(p) |
4.2. Структурная схема двигателя постоянного тока
Структурная схема электродвигателя без учета электромагнитной инерции:

|
| w0(р) |
| w1(р) |
| М(р) |
| - |
|
| w1(р) |
| -Мс(р) |
| UЯ(p) |

|
|
|
|
| М(р) |
| Iя(р) |
Структурная схема ДПТ с НВ:
4.3. Структурная схема тиристорного преобразователя:
| UУ(p) |
| Ed(p) |
|
4.4. Структурная схема датчиков цепей обратных связей:
Обратная связь по скорости:
| -UОсi(p) |
| UРС(p) |
| UЗТ(p) |
| IДВ(p) |

|
Обратная связь по току:

|
| -UОСw(p) |
| UЗ(p) |
| UЗС(p) |
| wДВ(p) |
4.5. Структурная схема регулятора скорости:
| КРС |
| UЗ(p) |
| -UОСw(p) |
| UЗС(p) |
| UРС(p) |
4.6. Структурная схема регулятора тока:

|
| UРС(p) |
| -UОСi(p) |
| UЗТ(p) |
| Uу(p) |
4.7. Структурная схема (полная) САУ.
Структурная схема САУ с подчиненным регулированием без учета упругости механической передачи приведена на рисунке 4.1.
| ω1 |
| Mc |

|
| Крс |
| Кс |
|
|
| Кт |
|
| кФ |
| кФ |
| UЗ |
Рисунок 4.2 – Структурная схема САУ с подчиненным регулированием без учета упругости механической передачи
Структурная схема системы автоматического управления с подчиненным регулированием с учетом упругости механической передачи приведена на рисунке 4.3.
| ω2 |
| Mc |
|
|
| Крс |
| Кс |
|

|
|
|
|
| Кт |
|
|
| кФ |
| кФ |
| UЗ |
Рисунок 4.3 – Структурная схема САУ с подчиненным регулированием с учетом упругости механической передачи
5. ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ САУ ПОУПРАВЛЯЮЩЕМУ И ВОЗМУЩАЮЩЕМУ ВОЗДЕЙСТВИЯМ
5.1. Вывод передаточной функции САУ по управляющему воздействию:
| ω2 |
|
|
| Крс |
| Кс |
|
|
|
|
|
|
|
|
| Кт |
|
|
| кФ |
| кФ |
| UЗ |
Преобразуем схему, пренебрегая обратной связью кФ:
| ω2 |
| Wрс |
|
|
|
|
|
| кФ |
| Кдс |
|
| UЗ |
Определим постоянные времени:









| Wpс(р) |

|

|
|

|
| Кс |

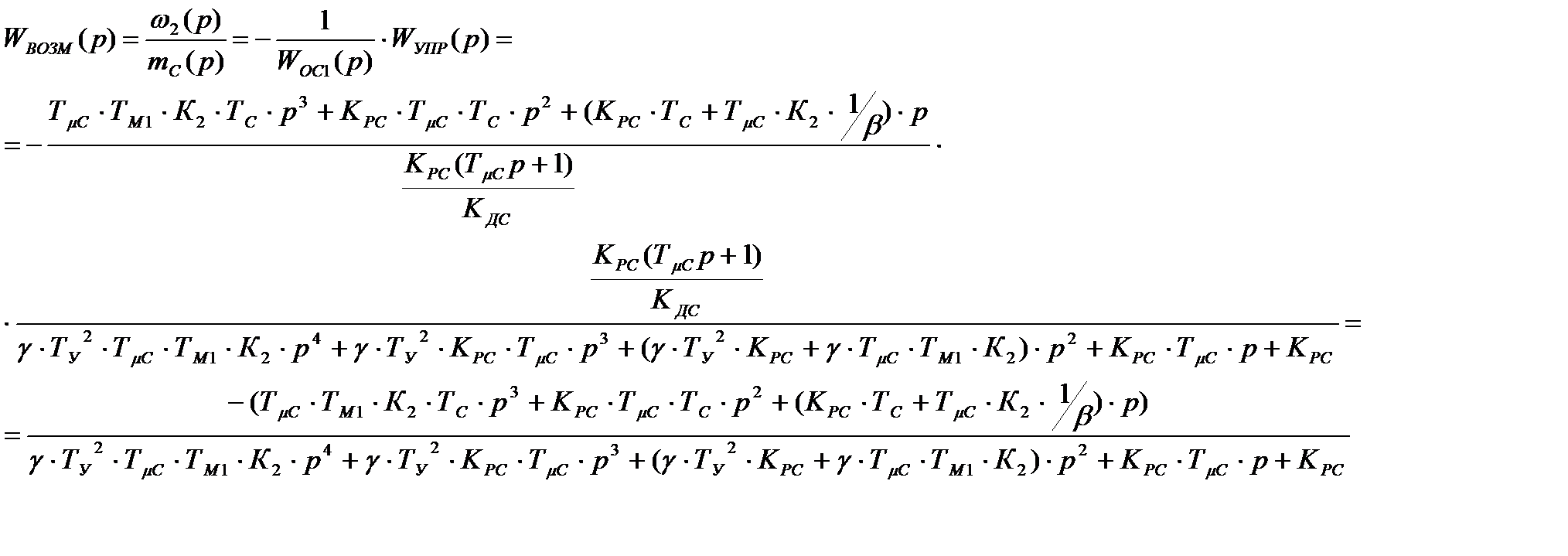
 5.2 Вывод передаточной функции САУ по возмущающему воздействию
5.2 Вывод передаточной функции САУ по возмущающему воздействию
| ω2 |
| Mc |
|
|
| Крс |
| Кс |
|
|
|
|
|
|
|
|
| Кт |
|
|
| кФ |
| кФ |
| UЗ |
Преобразуем схему:
|
| Wpт(р) |
| Крс |
|
|
| Кдт |
|
| кф |
|
|

|

|

|
6. ИССЛЕДОВАНИЕ САУ НА УСТОЙЧИВОСТЬ
6.1. Алгебраические критерии устойчивости
Устойчивостью называют свойство системы возвращаться в исходный или принимать новый установившийся режим после всякого выхода из него в результате какого-либо воздействия.
Система устойчива, если ее выходная величина остается ограниченной в условиях действия на систему ограниченных по величине возмущений.
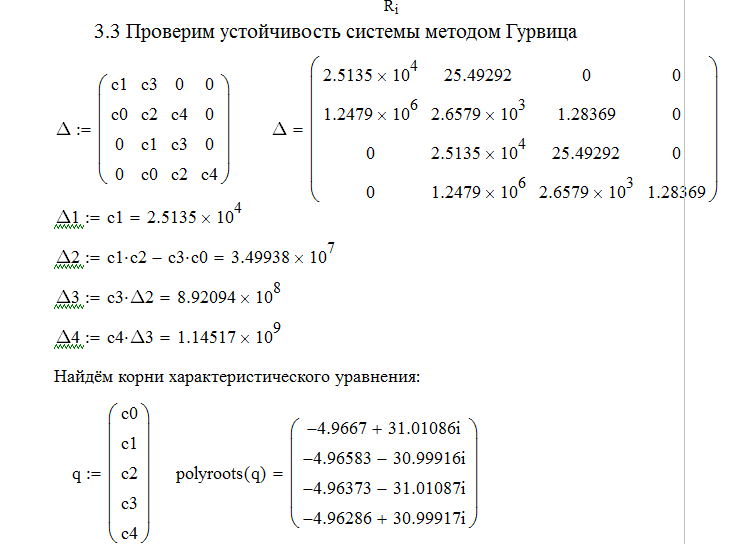
Критерий устойчивости Рауса – Гурвица
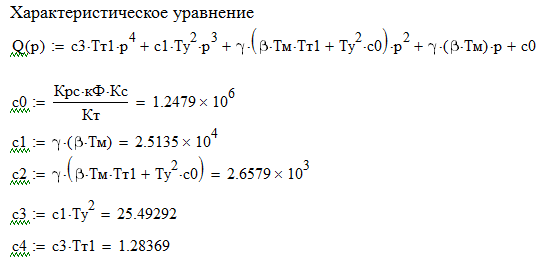
Запишем характеристическое уравнение нашей системы: 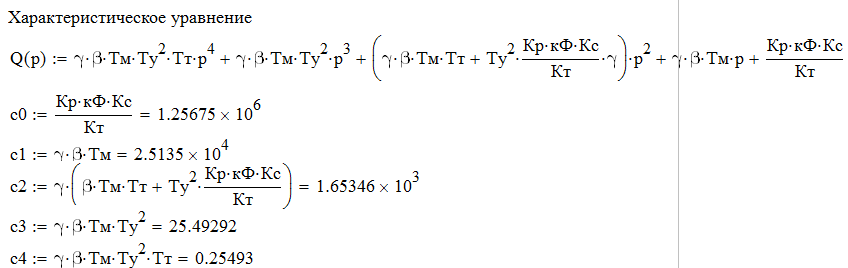
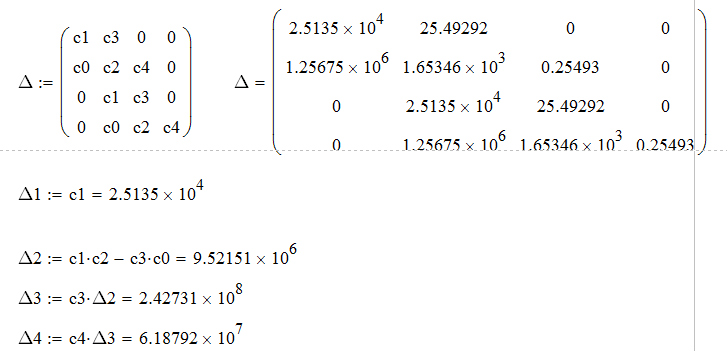
Так как определитель Гурвица больше нуля, то система устойчива.
Корневой метод
Условие устойчивости: все корни характеристического уравнения Q(p) должны лежать слева от мнимой оси.
Запишем характеристическое уравнение системы:


Действительные части корней – отрицательные, поэтому делаем вывод, что система устойчива и дополнительной коррекции не требует.
6.2. Частотные критерии устойчивости
Критерий устойчивости Михайлова.
Критерий Михайлова формируется так: система устойчива, если годограф Q(jw), начинаясь на действительной положительной полуоси, огибает против часовой стрелки начало координат, проходя последовательно n квадрантов, где n – порядок системы.
Запишем характеристическое уравнение системы:


Заменим р на jω:


Выделим мнимую и действительную часть


Построим годограф Михайлова с помощью прикладной программы MathCad:
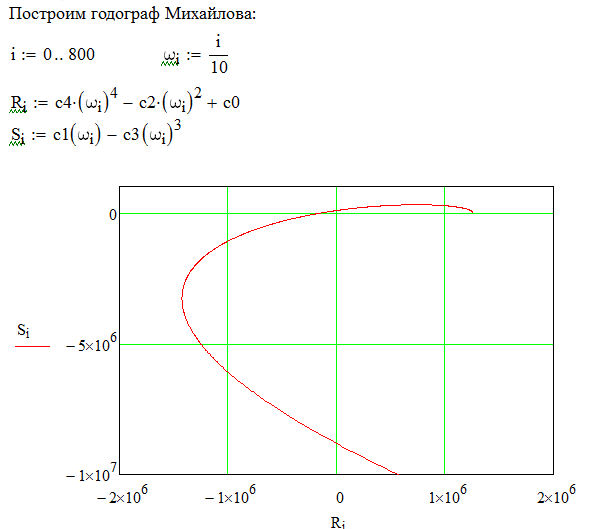
Рисунок 6.1 – Годограф Михайлова
Т.к. годограф последовательно проходит через четыре квадранта, огибая начало координат против часовой стрелки, окончательно можно сделать вывод, что система устойчива.
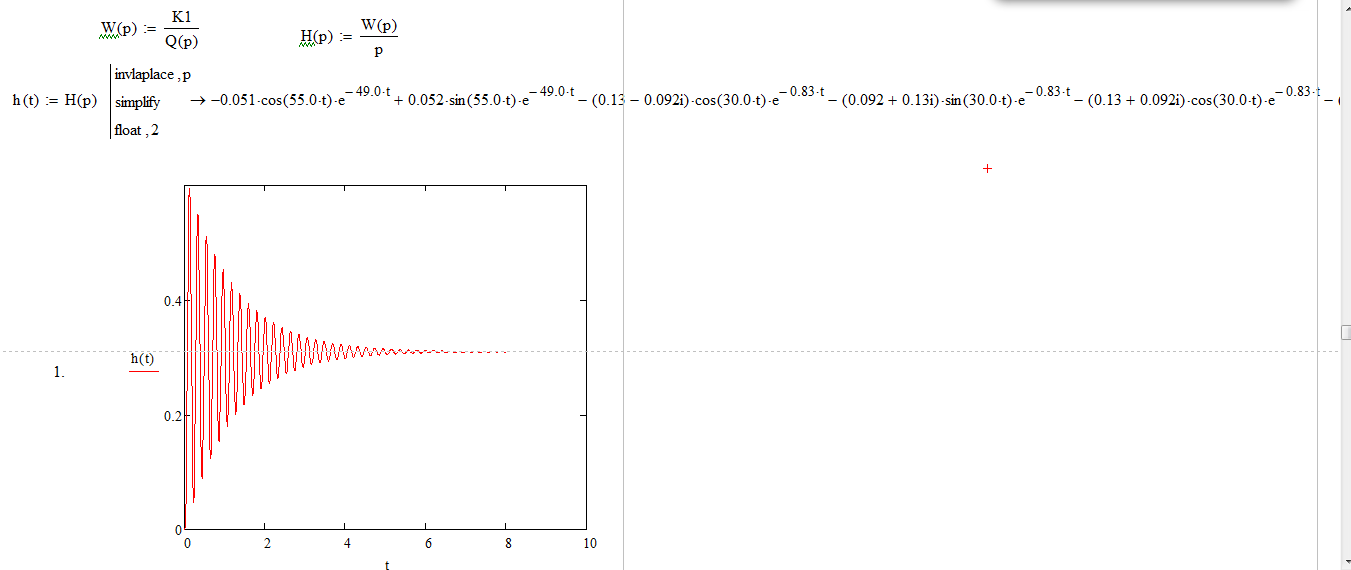 Построим график переходных процессов.
Построим график переходных процессов.
Рисунок 6.2 – График переходного процесса
7. ОПРЕДЕЛЕНИЕ ПОКАЗАТЕЛЕЙ КАЧЕСТВА САУ
7.1. Определение показателей качества САУ методами теории автоматического управления:
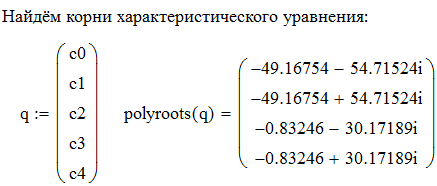
Характеристический полином:

Корни характеристического уравнения:
 -083246
-083246  30.17189j
30.17189j

 54,71524
54,71524
Берем корни лежащие ближе к мнимой оси.
-083246 30.17189j
α= -0.83246
β= 30,17189j
Показатели качества регулирования:
1.Запас устойчивости:
2. Время регулирования:
где Δ – ошибка регулирования (Δ = 5%)
3. Колебательность
4. Перерегулирование
5. Демфирование

7.2. Сравнительный анализ показателей качества САУ с требуемыми по технологии
Параметры системы, полученные в результате расчета в отношении соответствия требованиям технологического процесса нельзя считать удовлетворительными т.к. колебательность, перерегулирование, время регулирования системы слишком велики. Исходя из этого делаем вывод, что нужна оптимизация САУ.
8. МОДЕЛИРОВАНИЕ САУ И ОПТИМИЗАЦИЯ
8.1 Математическая модель САУ с учетом упругости механической передачи.
Построим модель для симуляции системы в пакете Simulink прикладной программы Matlab.


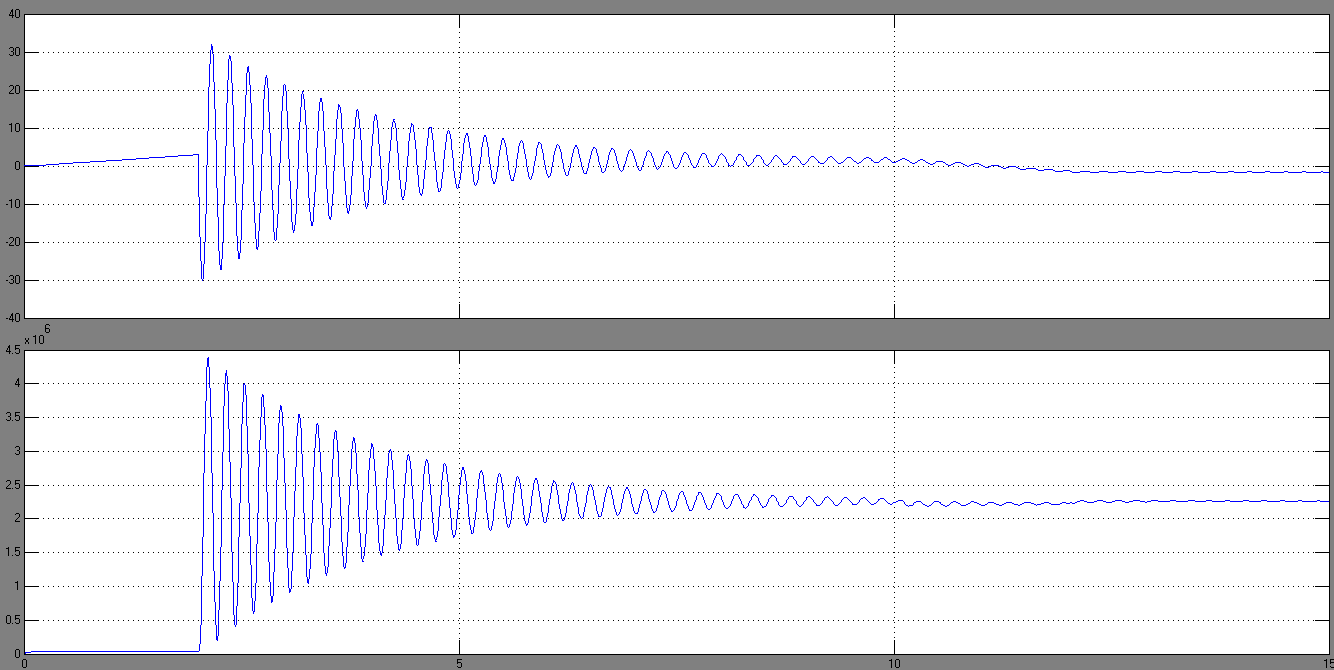
Рисунок 8.2 – График переходного процесса скорости механизма и момента на валу
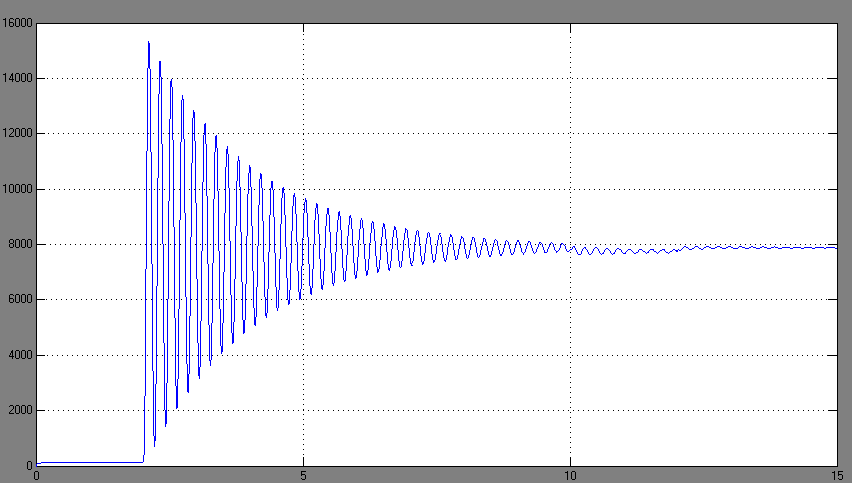
Рисунок 8.3 – График переходного процесса тока якоря
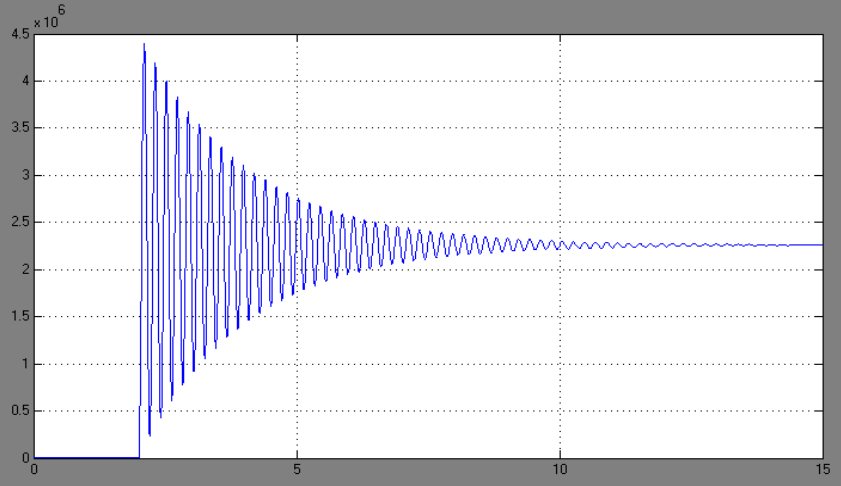
Рисунок 8.4 – График переходного процесса упругого момента.
8.2 Анализ результатов моделирования
Исходя из графиков переходных е обходи можно сделать е об, что САУ не удовлетворяет требованиям технологического процесса. В частности, необходимо снизить колебательность и изменить время регулирования. Следовательно, необходима коррекция параметров регулятора.
8.3 Оптимизация САУ
Оптимизируем систему методом проб и ошибок, подбирая коэффициент «а» и определяя корни характеристического полинома, добиваемся наиболее оптимального для данной САУ расположения корней.
Построим годограф Михайлова с помощью прикладной программы MathCad:
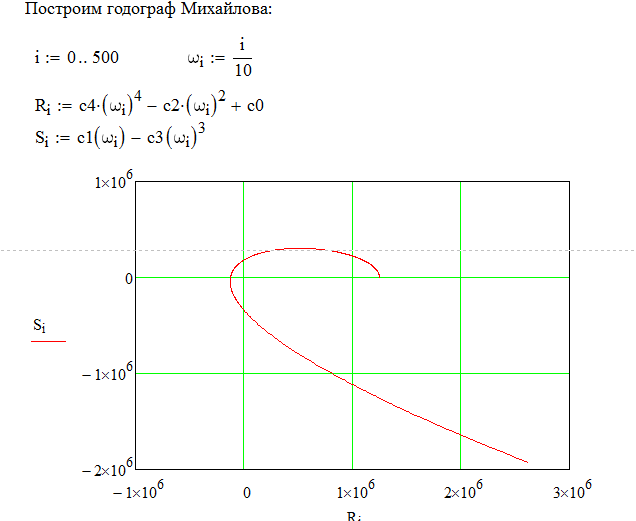
Рисунок 8.5 – Годограф Михайлова
Воспользуемся методом обратного преобразования Лапласа, с помощью прикладной программы MathCad получаем:
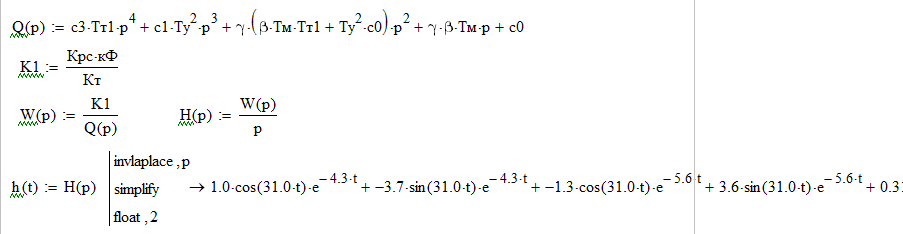

Рисунок 8.6 – График переходного процесса
Показатели качества регулирования оптимизированной САУ
1.Запас устойчивости:
2. Время регулирования:
где Δ – ошибка регулирования (Δ = 5%)
3. Колебательность
4. Перерегулирование

5. Демфирование
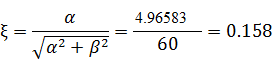


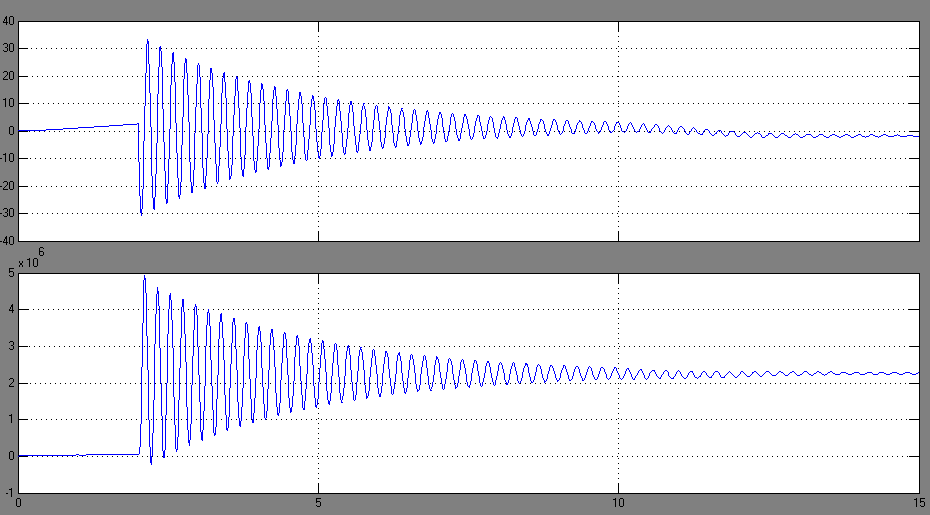
Рисунок 8.8 – График переходного процесса скорости механизма и момента на валу

Рисунок 8.9 – График переходного процесса тока якоря
Рисунок 8.10 – График переходного процесса упругого момента.
При анализе получившихся графиков можно заметить, что теоретические данные не совпадают с экспериментальными.
ВЫВОДЫ
В данной расчетно-графической работе была рассчитана система автоматического управления главным приводом блюминга, выполненная по схеме САУ с подчинённым регулированием.
В процессе исследования выяснили, что система получилась устойчивой.
Исходя из расчетов, проведенных на основе исследования корневых показателей качества и показателей качества по кривым ПП, мы можем видеть, что данная САУ имеет близкое к оптимальному время регулирования, но в то же время, имеет довольно большое динамическое и статической падение скорости, так же большое значение колебательности и перерегулирования, что является не удовлетворительным для требований технологического процесса. Это все говорит о том, что данная САУ требует дальнейшей оптимизации и корректировки.
СПИСОК ЛИТЕРАТУРЫ
1. Задорожний Н. А. «Методические указания к выполнению курсовой работы по дисциплине «Теория автоматического управления»», ДГМА; Краматорск, 2006 г.
2. Задорожний Н. А., Задорожняя И. Н. «Анализ и синтез электромеханических систем управления приводом машин с упругими механическими связями», ДГМА; Краматорск, 2010 г.
3. Бесекерский В. А., Попов Е. П. «Теория систем автоматического управления»; издательство «Наука», Москва, 1975 г.
4. Бесекерский В. А., Герасимов А. Н., Лучко С. В. «Сборник задач по теории автоматического управления и регулирования», Издательство «Наука», Москва, 1978 г.
5. Хомяк А., Светличный А., Зайченко С., Федоряк Р. «Система прямого цифрового управления главным приводом блюминга», Кривой Рог, 2004 г.
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 1192; Нарушение авторских прав?; Мы поможем в написании вашей работы!